TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150847
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051982
出願日
2024-03-27
発明の名称
運転支援装置、運転支援方法および運転支援プログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
弁理士法人ゆうあい特許事務所
主分類
B60T
7/12 20060101AFI20251002BHJP(車両一般)
要約
【課題】自車両の運転者が運転支援を不要なものとして感じることを抑制する運転支援装置、運転支援方法および運転支援プログラムを提供する。
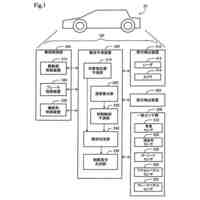
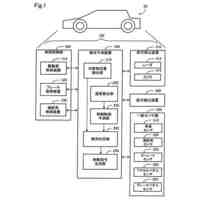
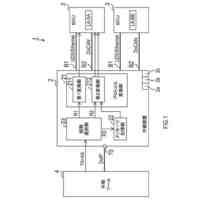
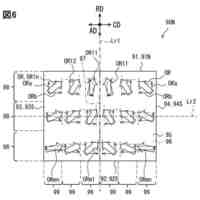
【解決手段】運転支援方法および運転支援プログラムの実行を行う運転支援装置40は、前方センサ10、12によって得られる情報、側方センサ14、16によって得られる情報、自車両に関する情報を取得し、軌道が自車両の軌道と交差する移動物標である交差物標を検出したセンサおよび交差物標のヨーレートに基づいて、自車両の運転支援を行い、交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが少なくとも前方センサであるとき、自車両を制動させる制御であるPB制御を実行し、交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが側方センサのみであるとき、PB制御と比較して制動力を小さくして自車両を制動させる制御であるLPB制御を実行する。
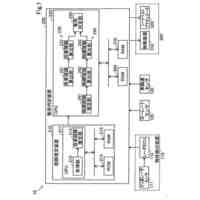
【選択図】図1
特許請求の範囲
【請求項1】
運転支援装置であって、
自車両(90)の前方の物標を検出する前方センサ(10、12)によって得られる情報、前記自車両の側方の物標を検出する側方センサ(14、16)によって得られる情報および前記自車両に関する情報を取得する取得部(S100)と、
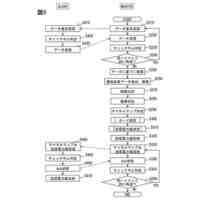
軌道が前記自車両の軌道と交差する移動物標である交差物標を検出したセンサおよび前記交差物標のヨーレートに基づいて、前記自車両の運転支援を行う支援部(S108~S118)と、
を備え、
前記支援部は、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが少なくとも前記前方センサであるとき、前記自車両を制動させる制御である第1制動制御を実行し、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが前記側方センサのみであるとき、前記第1制動制御と比較して制動力を小さくして前記自車両を制動させる制御である第2制動制御を実行する運転支援装置。
続きを表示(約 1,600 文字)
【請求項2】
前記支援部は、前記自車両の左右方向における前記自車両から前記交差物標までの距離(Dco)が所定範囲内であるとき、前記第1制動制御を実行する請求項1に記載の運転支援装置。
【請求項3】
前記支援部は、
前記自車両の車速が車速閾値以上であり、前記自車両のヨーレートがヨーレート閾値未満であって、前記自車両の旋回半径が旋回半径閾値以上であるとき、かつ、前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが少なくとも前記前方センサであるとき、前記第1制動制御を実行し、
前記自車両の車速が前記車速閾値以上であり、前記自車両のヨーレートが前記ヨーレート閾値未満であって、前記自車両の旋回半径が前記旋回半径閾値以上であるとき、かつ、前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが前記側方センサのみであるとき、前記第2制動制御を実行する請求項1または2に記載の運転支援装置。
【請求項4】
前記支援部は、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが少なくとも前記前方センサであるとき、かつ、前記自車両が前記交差物標と衝突するまでに要すると予測される時間である衝突予測時間(TTC)が第1時間閾値(TTC_th1)以下であるとき、前記第1制動制御を実行し、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが前記側方センサのみであるとき、かつ、前記衝突予測時間が、前記第1時間閾値よりも大きい第2時間閾値(TTC_th2)以下であるとき、前記第2制動制御を実行する請求項1または2に記載の運転支援装置。
【請求項5】
運転支援方法であって、
自車両(90)の前方の物標を検出する前方センサ(10、12)によって得られる情報、前記自車両の側方の物標を検出する側方センサ(14、16)によって得られる情報および前記自車両に関する情報を取得することと、
軌道が前記自車両の軌道と交差する移動物標である交差物標を検出したセンサおよび前記交差物標のヨーレートに基づいて、前記自車両の運転支援を行うこと(S108~S118)と、
を含み、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが少なくとも前記前方センサであるとき、前記自車両を制動させる制御である第1制動制御を実行し、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが前記側方センサのみであるとき、前記第1制動制御と比較して制動力を小さくして前記自車両を制動させる制御である第2制動制御を実行する運転支援方法。
【請求項6】
運転支援プログラムであって、
運転支援装置を、
自車両(90)の前方の物標を検出する前方センサ(10、12)によって得られる情報、前記自車両の側方の物標を検出する側方センサ(14、16)によって得られる情報および前記自車両に関する情報を取得する取得部(S100)、
軌道が前記自車両の軌道と交差する移動物標である交差物標を検出したセンサおよび前記交差物標のヨーレートに基づいて、前記自車両の運転支援を行う支援部(S108~S118)、
として機能させ、
前記支援部は、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが少なくとも前記前方センサであるとき、前記自車両を制動させる制御である第1制動制御を実行し、
前記交差物標のヨーレートが所定範囲内であるとき、かつ、前記交差物標を検出したセンサが前記側方センサのみであるとき、前記第1制動制御と比較して制動力を小さくして前記自車両を制動させる制御である第2制動制御を実行する運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、運転支援装置、運転支援方法および運転支援プログラムに関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、特許文献1に記載されているように、自車両の周辺環境を認識して運転者に対する運転支援を行う車両の運転支援装置において、障害物判断部と、運転支援設定部とを備えた車両の運転支援装置が知られている。障害物判断部は、自車両外部に存在する障害物を検出し、自車両の運転者が視認可能な第1の障害物と自車両の運転者が視認困難な第2の障害物とを判断する。運転支援設定部は、上記第2の障害物との衝突リスクを上記第1の障害物との衝突リスクよりも高く評価して各障害物に対する衝突回避のための運転支援を設定する。また、運転支援では、音や表示による警報、自動ブレーキ制御装置を介した強制制動および自動操舵制御装置を介した回避操舵が行われる。
【先行技術文献】
【特許文献】
【0003】
特開2010-30513号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された運転支援装置による衝突回避のための強制制動が行われると、自車両の運転者は、自車両の減速に伴う慣性力を急に感じることから、この強制制動を不要に感じることがある。
【0005】
本開示は、自車両の運転者が運転支援を不要なものとして感じることを抑制する運転支援装置、運転支援方法および運転支援プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、運転支援装置であって、自車両(90)の前方の物標を検出する前方センサ(10、12)によって得られる情報、自車両の側方の物標を検出する側方センサ(14、16)によって得られる情報および自車両に関する情報を取得する取得部(S100)と、軌道が自車両の軌道と交差する移動物標である交差物標を検出したセンサおよび交差物標のヨーレートに基づいて、自車両の運転支援を行う支援部(S108~S118)と、を備え、支援部は、交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが少なくとも前方センサであるとき、自車両を制動させる制御である第1制動制御を実行し、交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが側方センサのみであるとき、第1制動制御と比較して制動力を小さくして自車両を制動させる制御である第2制動制御を実行する運転支援装置である。
【0007】
また、請求項5に記載の発明は、運転支援方法であって、自車両(90)の前方の物標を検出する前方センサ(10、12)によって得られる情報、自車両の側方の物標を検出する側方センサ(14、16)によって得られる情報および自車両に関する情報を取得することと、軌道が自車両の軌道と交差する移動物標である交差物標を検出したセンサおよび交差物標のヨーレートに基づいて、自車両の運転支援を行うこと(S108~S118)と、を含み、交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが少なくとも前方センサであるとき、自車両を制動させる制御である第1制動制御を実行し、
交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが側方センサのみであるとき、第1制動制御と比較して制動力を小さくして自車両を制動させる制御である第2制動制御を実行する運転支援方法である。
【0008】
さらに、請求項6に記載の発明は、運転支援プログラムであって、運転支援装置を、自車両(90)の前方の物標を検出する前方センサ(10、12)によって得られる情報、自車両の側方の物標を検出する側方センサ(14、16)によって得られる情報および自車両に関する情報を取得する取得部(S100)、軌道が自車両の軌道と交差する移動物標である交差物標を検出したセンサおよび交差物標のヨーレートに基づいて、自車両の運転支援を行う支援部(S108~S118)、として機能させ、支援部は、交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが少なくとも前方センサであるとき、自車両を制動させる制御である第1制動制御を実行し、交差物標のヨーレートが所定範囲内であるとき、かつ、交差物標を検出したセンサが側方センサのみであるとき、第1制動制御と比較して制動力を小さくして自車両を制動させる制御である第2制動制御を実行する運転支援プログラムである。
【0009】
交差物標を検出したセンサが少なくとも前方センサであるとき、交差物標は、自車両の運転者が視認可能な移動物標である。このため、このとき、自車両の運転者は、交差物標を認識しているため、自動制動制御が実行されることを予測している。したがって、このとき、第1制動制御が実行されても、自車両の運転者は、第1制動制御が不要なものとして感じにくい。さらに、交差物標を検出したセンサが側方センサのみであるとき、交差物標は、自車両の運転者が視認困難な移動物標である。このため、このとき、自車両の運転者は、交差物標を認識していないとともに自動制動制御が実行されることを予測していない。よって、このとき、第1制動制御と比較して制動力が小さい第2制動制御が実行されることにより、自車両の運転者は、自車両の減速に伴う慣性力を急に感じにくい。したがって、自車両の運転者は、第2制動制御が不要なものとして感じにくい。よって、自車両の運転者が運転支援を不要なものとして感じることが抑制される。
【0010】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
ステータ
12日前
株式会社デンソー
電子装置
7日前
株式会社デンソー
電子装置
6日前
株式会社デンソー
反力装置
6日前
株式会社デンソー
農業用装置
8日前
株式会社デンソー
レーダ装置
5日前
株式会社デンソーテン
インバータ
6日前
株式会社デンソー
電力変換装置
8日前
株式会社デンソー
衝突予測装置
7日前
株式会社デンソー
車載システム
6日前
株式会社デンソー
車載システム
6日前
株式会社デンソー
車両制御装置
6日前
株式会社デンソー
衝突予測装置
7日前
株式会社デンソー
運転支援装置
7日前
株式会社デンソー
運航管理装置
5日前
株式会社デンソー
電力変換装置
今日
株式会社デンソー
電圧検出回路
8日前
株式会社デンソー
巻線界磁ロータ
今日
株式会社デンソー
はんだ付け装置
今日
株式会社デンソーウェーブ
通行管理システム
6日前
株式会社デンソー
スイッチング電源
6日前
株式会社デンソー
無線通信システム
6日前
株式会社デンソー
フェード検知装置
6日前
株式会社デンソー
セル制御システム
5日前
株式会社デンソー
ステータ及びモータ
1日前
株式会社デンソー
スイッチング制御装置
1日前
株式会社デンソー
中継装置、プログラム
6日前
株式会社デンソー
モータ部品、および、モータ
5日前
株式会社デンソー
電力変換装置及び駆動システム
5日前
株式会社デンソー
電力変換装置及び駆動システム
5日前
株式会社デンソー
電力変換装置及び駆動システム
5日前
株式会社デンソー
電力変換装置及び駆動システム
5日前
株式会社デンソー
作業装置および作業プログラム
7日前
株式会社デンソー
経路推定装置および衝突判定装置
6日前
株式会社デンソー
プリント基板および電子制御装置
6日前
株式会社デンソー
プリント基板および電子制御装置
6日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ