TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025144760
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044600
出願日
2024-03-21
発明の名称
クレーン自動運転システム
出願人
株式会社大林組
代理人
個人
,
個人
主分類
B66C
13/48 20060101AFI20250926BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】作業効率を向上させることができ、ヒューマンエラーの発生を抑えることが可能なクレーン自動運転システムを提供する。
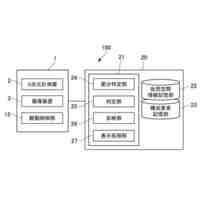
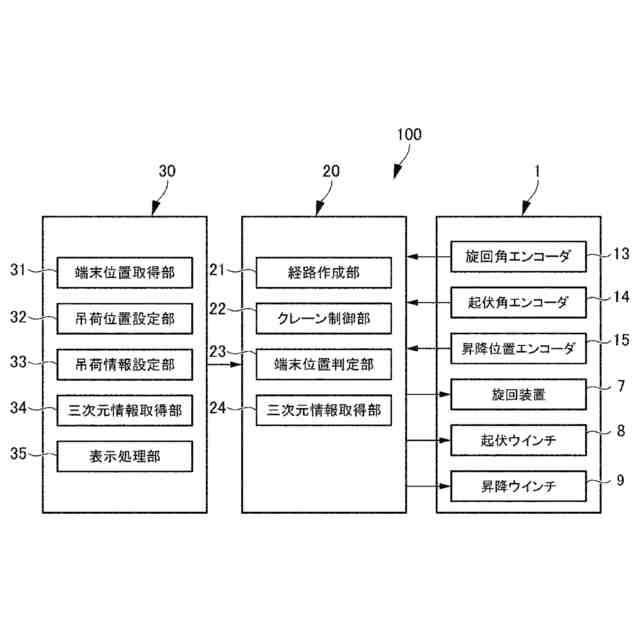
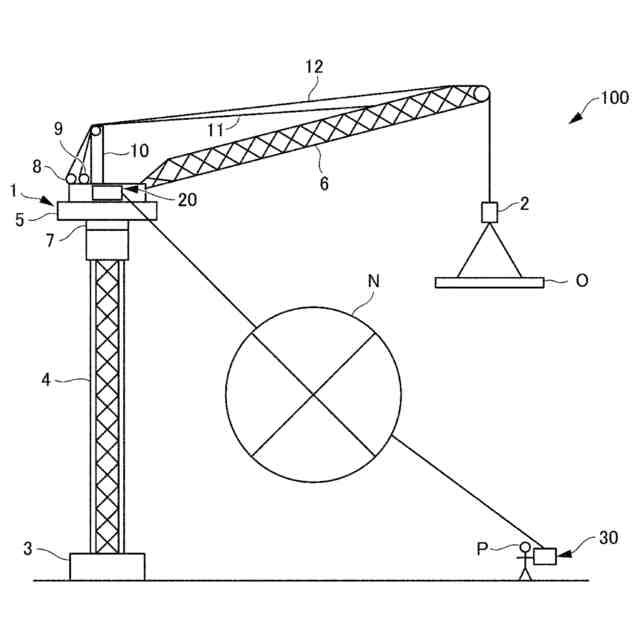
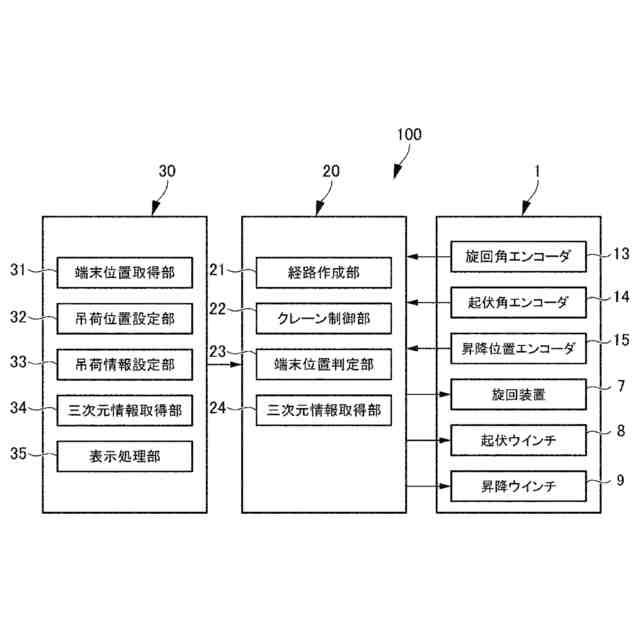
【解決手段】本開示は、クレーン自動運転システム100であって、クレーン1の駆動装置を制御する制御装置20と、制御装置20に通信可能に接続される端末30とを備え、端末30は、移動始点位置及び移動終点位置の少なくとも一方の位置情報である吊荷位置情報を設定する吊荷位置設定部32と、吊荷に関する吊荷情報を設定する吊荷情報設定部33と、を有し、設定した吊荷位置情報及び吊荷情報を制御装置20へ送信し、制御装置20は、端末30から受信した吊荷位置情報及び吊荷情報に基づいて移動始点位置から移動終点位置への経路を作成する経路作成部21と、経路作成部21が作成した経路に基づいてクレーン1の駆動装置を自動制御してクレーン1の吊荷支持部を移動させるクレーン制御部22と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
吊荷を支持可能なクレーンの吊荷支持部を移動始点位置から移動終点位置へ移動させるクレーン自動運転システムであって、
前記クレーンの駆動装置を制御する制御装置と、前記制御装置に通信可能に接続される端末とを備え、
前記端末は、前記移動始点位置及び前記移動終点位置の少なくとも一方の位置情報である吊荷位置情報を設定する吊荷位置設定手段と、吊荷に関する吊荷情報を設定する吊荷情報設定手段と、を有し、設定した前記吊荷位置情報及び前記吊荷情報を前記制御装置へ送信し、
前記制御装置は、前記端末から受信した前記吊荷位置情報及び前記吊荷情報に基づいて前記移動始点位置から前記移動終点位置への経路を作成する経路作成手段と、前記経路作成手段が作成した前記経路に基づいて前記クレーンの前記駆動装置を自動制御して前記クレーンの前記吊荷支持部を移動させるクレーン制御手段と、を有する
ことを特徴とするクレーン自動運転システム。
続きを表示(約 730 文字)
【請求項2】
前記端末は、表示部と、建設現場を仮想空間に再現して前記表示部に三次元表示させるための三次元情報を取得する三次元情報取得手段と、前記三次元情報取得手段が取得した前記三次元情報に基づいて前記建設現場を仮想空間に再現して前記表示部に表示させる表示処理手段と、を有し、
前記端末の前記吊荷位置設定手段は、前記表示部に表示される仮想空間上の前記建設現場で指定された位置を前記吊荷位置情報に設定する
ことを特徴とする請求項1に記載のクレーン自動運転システム。
【請求項3】
前記端末は、前記端末の現在位置である端末位置情報を取得する端末位置取得手段を有し、前記端末位置取得手段で取得した前記端末位置情報を前記制御装置へ送信し、
前記制御装置は、前記端末から受信した前記端末位置情報と前記吊荷位置情報とに基づいて、前記端末の現在位置と前記吊荷位置情報が示す位置とが所定の距離以上離間しているか否かを判定する端末位置判定手段を有し、
前記クレーン制御手段は、前記端末の現在位置と前記吊荷位置情報が示す位置とが前記所定の距離以上離間していると前記端末位置判定手段が判定した場合には、前記クレーンの前記駆動装置の自動制御を実行しない
ことを特徴とする請求項1又は請求項2に記載のクレーン自動運転システム。
【請求項4】
前記端末は、前記端末の現在位置である端末位置情報を取得する端末位置取得手段を有し、
前記端末の前記吊荷情報設定手段は、前記端末位置取得手段で取得した前記端末位置情報を前記吊荷位置情報に設定する
ことを特徴とする請求項1に記載のクレーン自動運転システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、クレーン自動運転システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
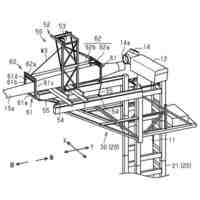
特許文献1には、クレーンの自動運転装置が開示されている。この自動運転装置は、基礎構造物上に固定されたマストと、マスト上に左右に旋回可能に設けられた旋回体と、旋回体に上下に起伏可能に設けられたジブと、ジブ先端部から吊り下げられるフックブロックとを備えたタワークレーンを自動運転する。タワークレーンを自動運転する場合、旋回体上の操作室にいるオペレータは、運転スケジュール入力装置に吊り荷(フックブロック)の移動の始点と終点とを入力するとともに、障害物がある場合には、障害物の配置を入力する。オペレータに入力された始点と終点と障害物の配置とは、運転スケジュール入力装置から自動運転制御装置に入力される。自動運転制御装置は、始点と終点と障害物の配置とから吊り荷の始点から終点までの移動経路を算出し、実際の吊り荷の移動を行う。
【先行技術文献】
【特許文献】
【0003】
特開平10-258989号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、建設現場には、吊り荷の移動始点位置となる荷取り場及び移動終点位置となる荷降ろし場は複数存在し、また、揚重作業の対象物(吊り荷)も様々であるので、新たな揚重作業を行う場合には、操作室のオペレータ(以下、単に「オペレータ」という。)は、これらの情報をクレーンの自動運転装置に入力する必要がある。しかし、タワークレーンの操作室は比較的高い位置にあり、また、操作室の下方には、建設中の建物等が存在する場合が多いので、オペレータは、次の揚重作業の対象物の情報(種類、大きさ、重さ等)や移動始点位置及び移動終点位置を、操作室から視認することは難しい。このため、次の揚重作業の対象物の情報や移動始点位置及び移動終点位置を、新たな移動始点位置または移動終点位置にいる玉掛者等の作業員からオペレータへトランシーバー等によって伝えて、その内容をオペレータがクレーン自動運転システムに入力することが行われている。
【0005】
しかし、揚重作業の対象物の情報や移動始点位置及び移動終点位置を、玉掛者等の作業員からオペレータへ伝えると、作業効率が低下するとともに、伝達ミス等のヒューマンエラーが発生するおそれがあるので、オペレータの負担が増大する。
【0006】
そこで、本開示は、作業効率を向上させることができ、ヒューマンエラーの発生を抑えることが可能なクレーン自動運転システムの提供を目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の第1の態様は、吊荷を支持可能なクレーンの吊荷支持部を移動始点位置から移動終点位置へ移動させるクレーン自動運転システムであって、前記クレーンの駆動装置を制御する制御装置と、前記制御装置に通信可能に接続される端末とを備え、前記端末は、前記移動始点位置及び前記移動終点位置の少なくとも一方の位置情報である吊荷位置情報を設定する吊荷位置設定手段と、吊荷に関する吊荷情報を設定する吊荷情報設定手段と、を有し、設定した前記吊荷位置情報及び前記吊荷情報を前記制御装置へ送信し、前記制御装置は、前記端末から受信した前記吊荷位置情報及び前記吊荷情報に基づいて前記移動始点位置から前記移動終点位置への経路を作成する経路作成手段と、前記経路作成手段が作成した前記経路に基づいて前記クレーンの前記駆動装置を自動制御して前記クレーンの前記吊荷支持部を移動させるクレーン制御手段と、を有する。
【0008】
本発明の第2の態様は、上記第1の態様のクレーン自動運転システムであって、前記端末は、表示部と、建設現場を仮想空間に再現して前記表示部に三次元表示させるための三次元情報を取得する三次元情報取得手段と、前記三次元情報取得手段が取得した前記三次元情報に基づいて前記建設現場を仮想空間に再現して前記表示部に表示させる表示処理手段と、を有し、前記端末の前記吊荷位置設定手段は、前記表示部に表示される仮想空間上の前記建設現場で指定された位置を前記吊荷位置情報に設定する。
【0009】
本発明の第3の態様は、上記第1の態様又は上記第2の態様のクレーン自動運転システムであって、前記端末は、前記端末の現在位置である端末位置情報を取得する端末位置取得手段を有し、前記端末位置取得手段で取得した前記端末位置情報を前記制御装置へ送信し、前記制御装置は、前記端末から受信した前記端末位置情報と前記吊荷位置情報とに基づいて、前記端末の現在位置と前記吊荷位置情報が示す位置とが所定の距離以上離間しているか否かを判定する端末位置判定手段を有し、前記クレーン制御手段は、前記端末の現在位置と前記吊荷位置情報が示す位置とが前記所定の距離以上離間していると前記端末位置判定手段が判定した場合には、前記クレーンの前記駆動装置の自動制御を実行しない。
【0010】
本発明の第4の態様は、上記第1の態様のクレーン自動運転システムであって、前記端末は、前記端末の現在位置である端末位置情報を取得する端末位置取得手段を有し、前記端末の前記吊荷情報設定手段は、前記端末位置取得手段で取得した前記端末位置情報を前記吊荷位置情報に設定する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社大林組
操縦装置
27日前
株式会社大林組
飛込み台
2か月前
株式会社大林組
接続構造
27日前
株式会社大林組
加熱装置
24日前
株式会社大林組
開封装置
24日前
株式会社大林組
接合構造
27日前
株式会社大林組
接合構造
1か月前
株式会社大林組
測定方法
2か月前
株式会社大林組
仮設建築物
2か月前
株式会社大林組
建物の構造
1か月前
株式会社大林組
ドリル装置
27日前
株式会社大林組
スロープ構造
24日前
株式会社大林組
折畳み構造物
1か月前
株式会社大林組
耐火被覆構造
2か月前
株式会社大林組
ルーバー構造
2か月前
株式会社大林組
床板の設置方法
2か月前
株式会社大林組
梁筋の配筋方法
16日前
株式会社大林組
可搬式充電設備
1か月前
株式会社大林組
災害時支援装置
16日前
株式会社大林組
リフトアップ装置
2か月前
株式会社大林組
鋼矢板の圧入方法
1か月前
株式会社大林組
リフトアップ装置
2か月前
株式会社大林組
進捗管理システム
3日前
株式会社大林組
大梁胴縁接続構造
18日前
株式会社大林組
構造物及び施工方法
16日前
株式会社大林組
電動式運搬補助装置
26日前
株式会社大林組
繊維材供給システム
24日前
株式会社大林組
建築物及び建築方法
2か月前
株式会社大林組
袋体付き排水パイプ
2か月前
株式会社大林組
袋体付き排水パイプ
2か月前
株式会社大林組
柱接合構造の施工方法
16日前
株式会社大林組
自動屋根開閉システム
1か月前
株式会社大林組
建設現場支援システム
17日前
株式会社大林組
クレーンの自動運転装置
1か月前
株式会社大林組
建物の構築方法及び建物
2か月前
株式会社大林組
継手装置及び複合支持杭
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ