TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025144594
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044313
出願日
2024-03-20
発明の名称
ロボットハンド、ロボットシステム
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
15/08 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットシステムの省スペース化を図り、ロボットが従事できる作業を増やすこと。
【解決手段】アーム21のフランジ部28に装着されているハンド200は、一対の挟持部材206と、それら挟持部材206を開閉させる開閉機構102とを備えている。挟持部材206は、フランジ部28の回動中心軸線である第6軸AX6の軸線方向に延びるベース部211を有してなり、ベース部211の下端部213には、ベース部211と交差する方向に延びる延出部241が形成されており、当該延出部241にはビーカを挟持するためのビーカ用挟持部242が設けられている。また、ベース部211にて延出部241よりも下側となる部分には、ダイヤルを挟むためのダイヤル操作部222が形成されている。ダイヤル操作部222の中心位置と第6軸AX6との距離は、ビーカ挟持部242の中心位置と第6軸AX6との距離よりも小さくなっている。
【選択図】 図16
特許請求の範囲
【請求項1】
複数の関節部を有してなるロボットアームの先端部に装着可能であり、一対の開閉部材と、それら開閉部材の相対距離を変更するための距離可変機構とを備えているロボットハンドであって、
各前記開閉部材は、前記ロボットアームの先端部の回動中心軸線と同じ方向に延びるベース部を有し、
前記ベース部には、
搬送対象である第1の対象物を挟んで保持する第1挟み部と、
前記第1挟み部とは異なる箇所に形成され、回動操作の対象である第2の対象物を挟む第2挟み部と
が設けられており、
前記第2挟み部における中心位置から前記回動中心軸線までの距離は、前記第1挟み部における中心位置から前記回動中心軸線までの距離よりも小さくなっているロボットハンド。
続きを表示(約 520 文字)
【請求項2】
前記第1挟み部及び前記第2挟み部は、前記第2挟み部よりも前記第1挟み部の方が前記ベース部の基端部寄りとなるように配設されている請求項1に記載のロボットハンド。
【請求項3】
前記第1挟み部及び前記第2挟み部は、前記ベース部の側部から延出しており、
前記第1挟み部の延出方向と前記第2挟み部の延出方向とが異なっている請求項1に記載のロボットハンド。
【請求項4】
前記第2の対象物は、前記第2挟み部により挟まれる外周部分が円形となっており、
前記第2挟み部は、前記外周部分に対して、当該外周部分の周方向における少なくとも3箇所で当接する構成となっており、
前記ベース部には、当該ベース部の側部から延出する延出部を有しており、
前記第2挟み部は、前記ベース部と前記延出部とに跨るようにして形成されている請求項1に記載のロボットハンド。
【請求項5】
請求項1乃至請求項4のいずれか1つに記載のロボットハンドが装着されたロボットアームと、前記ロボットハンド及び前記ロボットアームの駆動制御を行う駆動制御部とを備えているロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンド、ロボットシステムに関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
ロボットシステムを構成している人協働ロボット等のロボットには、複数の関節部が形成されたアーム(ロボットアーム)と、ロボットアームの先端部に装着されたハンド(ロボットハンド)とを備えているものがある。ロボットハンドには、例えば一対の可動爪によってワークを挟むように構成されているものがある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-1281号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、作業等に応じて挟む対象が異なる場合には、対象毎にロボットハンドを設け、必要に応じてロボットハンドを自動で換装する構成とすれば、ロボットが従事できる作業を増やすことができる。また、対象の形状や大きさ等に応じ可動爪の形状を定めることにより、対象の脱落等を好適に抑制できる。但し、換装用の治具や各種ロボットハンドをロボットの近傍に設置するにはある程度のスペースが必要になる。例えば研究所や実験室にて卓上にロボットを設置する場合、すなわちロボットシステムの設置領域に限りがある場合には、換装用のロボットハンドの設置によって作業領域が圧迫され得る。これは、ロボットが従事可能な作業を増やす上で妨げになり得る。このような設置領域に係る懸念を解消する上では、ロボットハンドに対をなす可動爪を複数組設け、それら可動爪を作業に応じて使い分ける構成とすれば、交換用のロボットハンドを準備しなくても従事できる作業の数を増やすことができる。しかしながら、このような対応では各組を動作させるための駆動機構が必要になり、ロボットハンドが大きくなると想定される。ロボットハンドが大きくなれば、治具等の周辺構成との衝突を回避する上でロボットの動きに係る制約が強くなる。これは、ロボットが従事する作業を増やす上で好ましくない。このように、限られたスペースでロボットを複数の作業に従事させる上で、ロボットハンドに係る構成には未だ改善の余地がある。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、ロボットシステムの省スペース化を図り、ロボットが従事できる作業を増やすことにある。
【課題を解決するための手段】
【0006】
第1の手段.複数の関節部を有してなるロボットアームの先端部に装着可能であり、一対の開閉部材と、それら開閉部材の相対距離を変更するための距離可変機構とを備えているロボットハンドであって、
各前記開閉部材は、前記ロボットアームの先端部の回動中心軸線と同じ方向に延びるベース部を有し、
前記ベース部には、
搬送対象である第1の対象物を挟んで保持する第1挟み部と、
前記第1挟み部とは異なる箇所に形成され、回動操作の対象である第2の対象物を挟む第2挟み部と
が設けられており、
前記第2挟み部における中心位置から前記回動中心軸線までの距離は、前記第1挟み部における中心位置から前記回動中心軸線までの距離よりも小さくなっている。
【0007】
本手段に示すように、第1の対象物用の第1挟み部と第2の対象物用の第2挟み部とを開閉部材に併設すれば、対象物に応じてハンドを換装することなく各対象物に係る作業を円滑に進めることができる。これは、限られたスペースにてロボットが従事可能な作業を増やす上で好ましい。また、対象物に合わせて挟み部を形成できるため、挟む機能を安定して発揮させることが可能となる。例えば、1の挟み部を用いて異なる2つの対象物を挟持する構成と比較して作業ミスを減らす上で有利である。そして、開閉部材の駆動に係る構成(距離可変機構等)を挟み部間で共用とすることができるため、駆動に係る構成が複雑になることを好適に抑制できる。
【0008】
本手段に示す開閉部材においては特に、第1挟み部と第2挟み部とがベース部における異なる箇所に設けられている。これは、それら挟み部の一方が他方によって対象物を挟む際の妨げになることを抑制する上で好ましい。そして、回動操作の対象である第2の対象物を挟む第2挟み部については、搬送対象である第1の対象物を挟んで保持する第1挟み部と比べて、回動中心軸線から中心位置までの距離が小さくなるように構成されている。これにより、第2挟み部を用いて第2の対象物を挟んで回動操作を行う場合には、ロボットアームの先端部の回動を主とする動きにより、ロボットの姿勢の変化を極力小さくすることが可能となる。これは、治具等の周辺構成との衝突を回避しつつ、第2の対象物の回動操作を実行する上で好ましい。なお、第1の対象物を搬送する場合には、ロボットアームを1箇所に留めながら姿勢を変化させるといった制約は生じにくい。すなわち、回動中心軸線からの距離が大きくなることにより動きづらくなるといった不都合は生じにくい。以上の理由から、ロボットが従事可能な作業を増やしつつ、2種の挟み部を無理なく共存させることができる。
【図面の簡単な説明】
【0009】
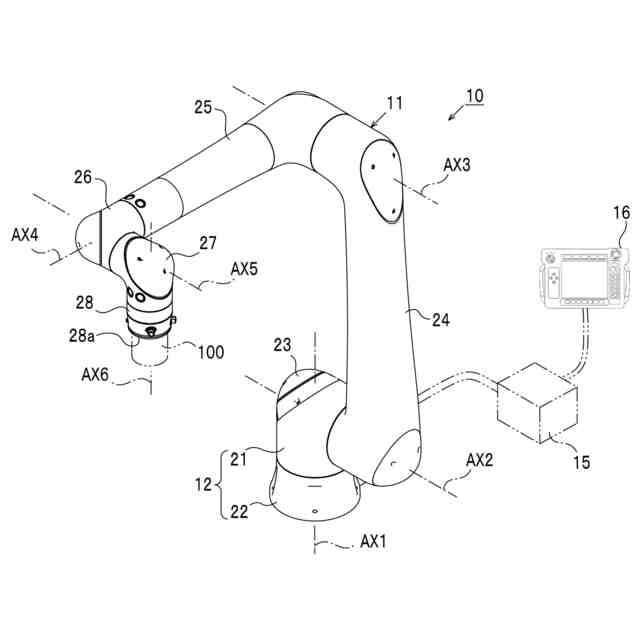
第1の実施形態におけるロボットシステムを示す斜視図。
ロボットシステムの電気的構成を示すブロック図。
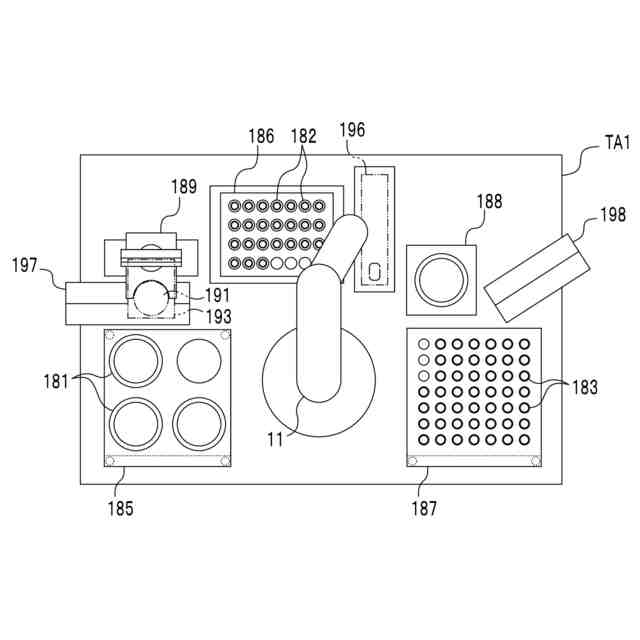
ロボットが設置されたテーブルを示す概略図。
ロボットが従事している作業の流れを示す概略図。
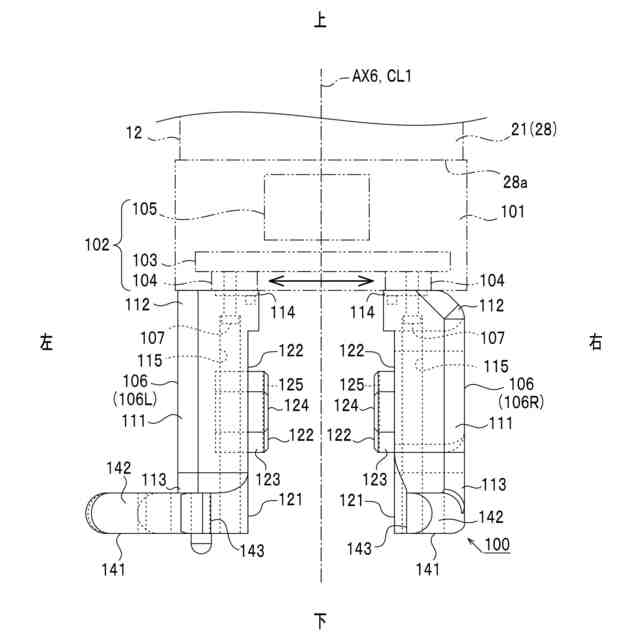
ハンドの正面図。
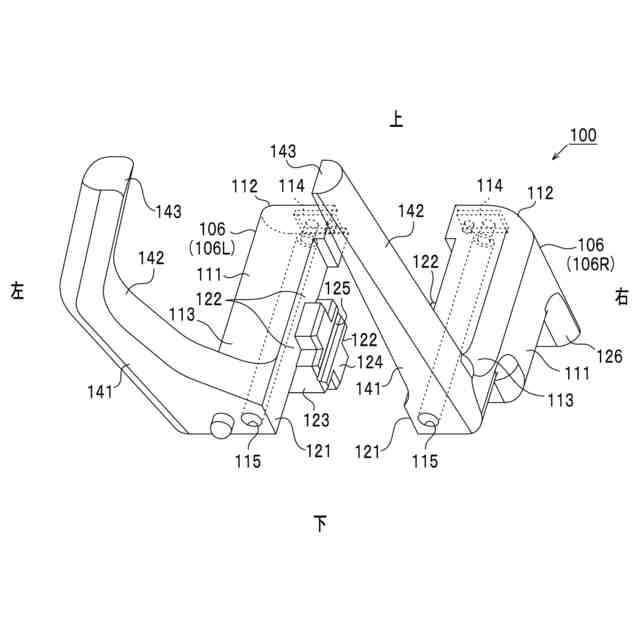
ハンドを斜め下方から見た斜視図。
(a)右側の挟持部材の左側面図、(b)左側の挟持部材の右側面図。
ビーカを保持した状態を示す概略図。
ピペット及びピペットスタンドを示す概略図。
ピペットの保持の流れを示す概略図。
チップの取り外しの流れを示す概略図。
綿棒の保持の流れを示す概略図。
変形例を示す概略図。
第2の実施形態におけるロボット及びテーブルを示す概略図。
ロボットが従事している作業の流れを示す概略図。
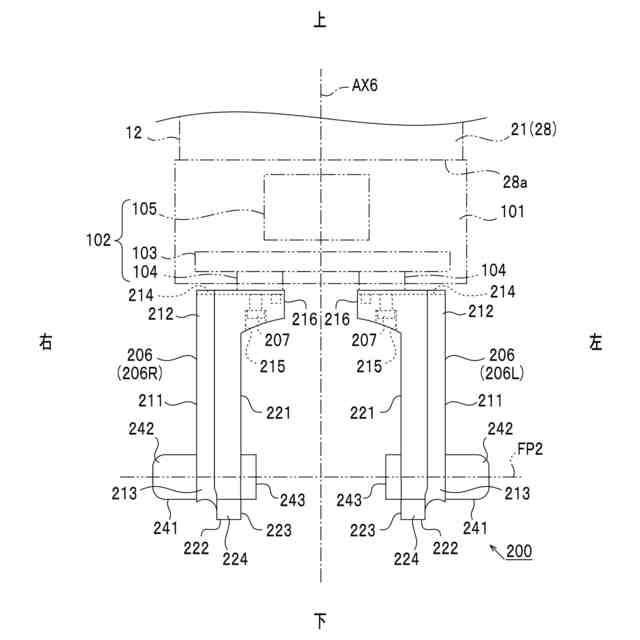
ハンドの背面図。
ハンドを斜め後方から見た斜視図。
ビーカを保持した状態を示す概略図。
ダイヤルを挟んだ状態を示す概略図。
ダイヤル操作の流れを示す概略図。
変形例を示す概略図。
第3の実施形態におけるロボット及びテーブルを示す概略図。
ロボットが従事している作業の流れを示す概略図。
ハンドの正面図。
右側の挟持部材の左側面図。
ハンドを下側から見た斜視図。
ビーカを保持した状態を示す概略図。
注射器のプランジャを保持した状態を示す概略図。
図28のA-A線部分断面図。
注射器のシリンジを保持した状態を示す概略図。
注射器のシリンジを保持した状態を示す概略図。
注射器のフィルタを保持した状態を示す概略図。
図32のB-B線部分断面図。
フィルタの取り付けの流れを示す概略図。
フィルタの取り付けの流れを示す概略図。
第4の実施形態における実験室を示す概略図。
搬送ロボットの側面図。
搬送システムの電気的構成を示すブロック図。
ハンド及びトレーを示す斜視図。
トレーの正面図。
トレーの側面図。
ハンドの側面図。
ハンドの平面図。
トレーの搬送の流れを示す概略図。
変形例を示す概略図。
変形例を示す概略図。
【発明を実施するための形態】
【0010】
<第1の実施形態>
以下、実験室などで用いられるロボットシステムに具現化した第1の実施形態について図面を参照しつつ説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
26日前
株式会社三協システム
製函機
24日前
川崎重工業株式会社
ロボット
3日前
CKD株式会社
把持装置
25日前
株式会社不二越
ロボット
2日前
株式会社三協システム
移載装置
23日前
株式会社竹中工務店
補助セット
2日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社ミクロブ
把持装置
25日前
SMC株式会社
着脱装置
24日前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
26日前
株式会社不二越
移動ロボットシステム
5日前
ARMA株式会社
ジョイントフレーム
1か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
エッジ仕上げ装置
15日前
株式会社不二越
ロボットシステム
23日前
本田技研工業株式会社
装置
8日前
株式会社不二越
ロボットシステム
26日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
29日前
株式会社不二越
垂直多関節ロボット
16日前
シンフォニアテクノロジー株式会社
搬送装置
5日前
大和ハウス工業株式会社
ねじ回転工具
24日前
ライオン株式会社
移載システム
17日前
アネックスツール株式会社
ドライバービット
1日前
ダイハツ工業株式会社
移載治具
1か月前
株式会社不二越
ロボットシステム
1か月前
ワールド技研株式会社
ロボットセル装置
2日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
15日前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
1か月前
シヤチハタ株式会社
マーキング装置
29日前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ