TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141301
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041175
出願日
2024-03-15
発明の名称
経路計画装置、システム、方法、プログラム、及び車両制御システム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G05D
1/622 20240101AFI20250919BHJP(制御;調整)
要約
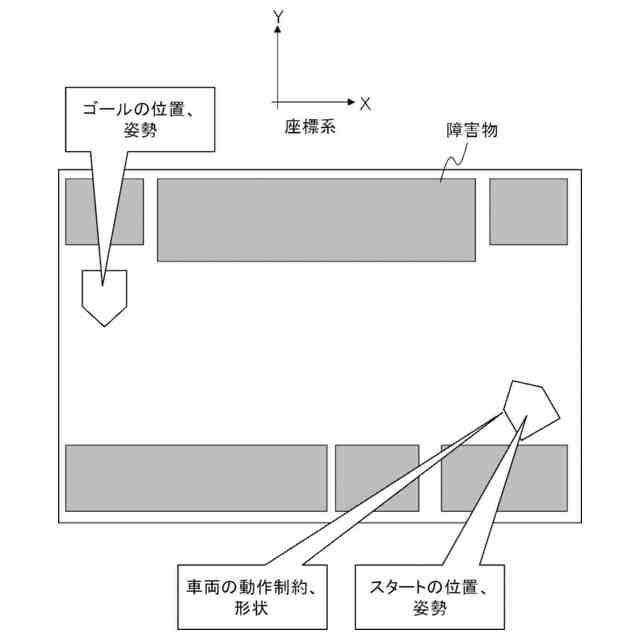
【課題】非ホロノミック拘束を持つ車両が所望の姿勢でゴールに到達するように、切り返し場所又はゴールに至るまでの経路を走行中にも再計画できる程度に短い時間で計画する。
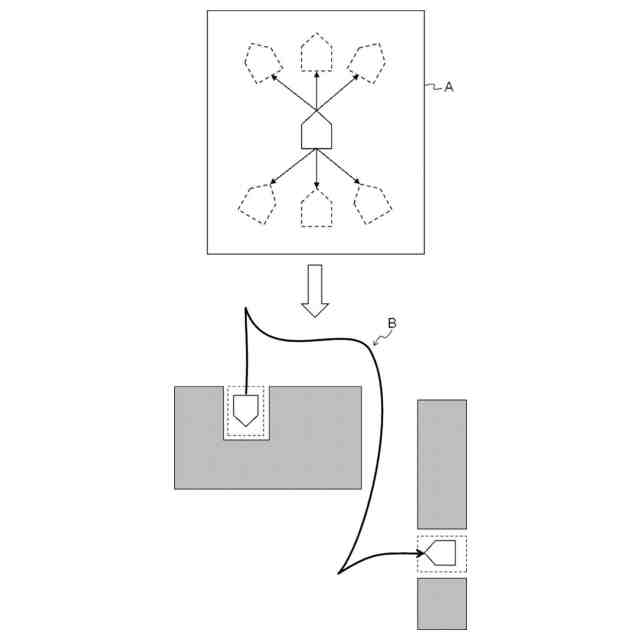
【解決手段】経路計画装置が、ゴール及び切り返し点に到達するときの車両の進行方向の方位に従って、ゴール又は切り返し点に車両の代表点が到達するように車両を誘導するための仮想誘導物を設置し、車両が障害物及び仮想誘導物に所定マージン距離以内に接近しないように経路を計画する。
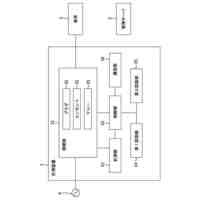
【選択図】図1
特許請求の範囲
【請求項1】
非ホロノミック拘束を持つ車両がゴールに至るための経路を計画する経路計画装置であって、
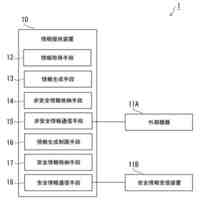
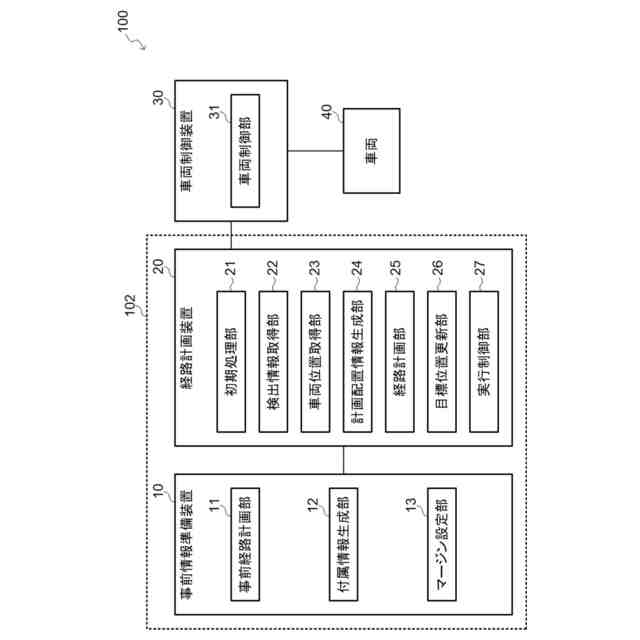
前記ゴールの位置、前記ゴールに至るまでに前記車両の進行方向を前進から後退又は後退から前進に切り替える1又は複数の切り返し点の位置、前記ゴール及び前記切り返し点に到達するときの車両の進行方向の方位、前記切り返し点が複数ある場合の到達順序、前記車両が障害物に接近しすぎないために用いる第1マージン距離、前記ゴール又は前記切り返し点に前記車両の代表点が前記方位に従って到達するように前記車両を誘導するために設置される仮想誘導物に前記車両が接近しすぎないために用いる第2マージン距離、並びに事前障害物が存在する場合には前記事前障害物の配置情報である事前配置情報を含む事前情報を取得する処理と、前記事前情報に基づいて最初に到達すべき前記切り返し点の位置を目標位置に設定する処理と、前記目標位置に前記仮想誘導物を設置する仮想誘導物設置処理とを含む初期処理を行う初期処理部と、
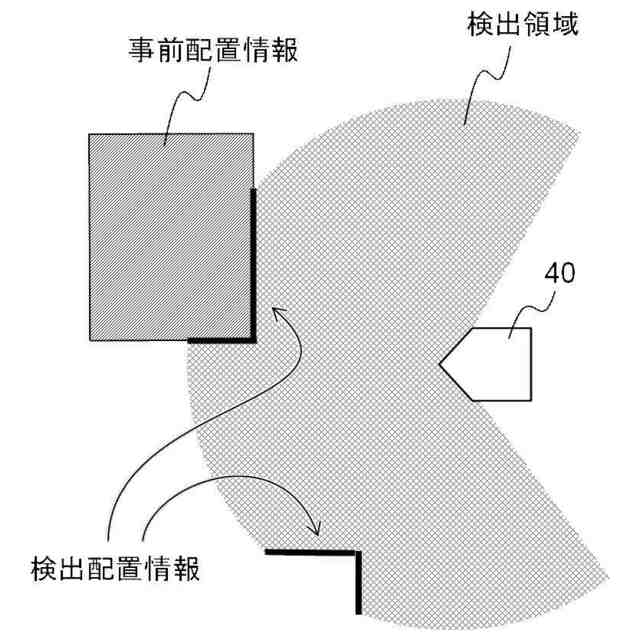
少なくとも前記車両の周辺に存在する前記障害物の配置情報である検出配置情報、並びに前記障害物の存在及び不存在が検出できた検出領域を示す情報を取得する検出情報取得部と、
前記車両の代表点の位置を取得する車両位置取得部と、
取得した前記検出配置情報及び前記初期処理において前記事前配置情報を取得した場合には前記検出領域外についての前記事前配置情報に基づいて、前記経路の計画に用いる計画対象障害物の配置情報である計画配置情報を生成する計画配置情報生成部と、
前記車両の代表点が前記計画対象障害物には前記第1マージン距離以内に接近することなく、前記仮想誘導物には前記第2マージン距離以内に接近することなく前記目標位置に至る経路を計画する経路計画部と、
前記車両が前記目標位置に到達した場合に前記目標位置が前記ゴールの位置でない場合は前記切り返し点の位置及び前記ゴールの位置のうち次に到達すべき位置に前記目標位置を更新し、更新した前記目標位置に前記車両を誘導するための前記仮想誘導物を設置する目標位置更新処理を行う目標位置更新部と、
前記初期処理部に前記初期処理を実行させ、前記初期処理の実行後、前記車両の代表点が前記目標位置に到達するまでの間に区間内初期処理及び区間内繰返し処理を行うこと、及び前記車両の代表点が前記ゴールの位置ではない前記目標位置に到達した場合には前記目標位置更新部に前記目標位置更新処理をさせることを、前記車両の代表点が前記ゴールの位置に到達するまで繰り返す実行制御部とを備え、
前記区間内初期処理は、前記検出情報取得部に前記検出配置情報及び前記検出領域を示す情報を取得させること、前記車両位置取得部に前記車両の代表点の位置を取得させること、前記計画配置情報生成部に前記計画配置情報を生成させること、並びに前記計画配置情報及び前記車両の代表点の位置に基づいて前記経路計画部に現時点における前記目標位置に至る経路を計画させることを含み、
前記区間内繰返し処理は、前記車両の進行に伴い、前記検出情報取得部に前記検出配置情報及び前記検出領域を示す情報を取得させること、前記車両位置取得部に前記車両の代表点の位置を取得させること、前記計画配置情報生成部に前記計画配置情報を生成させること、前回に生成された前記計画配置情報及び今回に生成された前記計画配置情報に基づいて前記計画対象障害物の配置の変化の有無を判定すること、並びに前記変化が有ると判定された場合には、今回に生成された前記計画配置情報及び前記車両の代表点の位置に基づいて前記経路計画部に現時点における前記目標位置に至る経路を計画させることを繰り返す処理を含む、
経路計画装置。
続きを表示(約 3,600 文字)
【請求項2】
前記経路計画部は、前記車両の代表点の位置からポテンシャルの最大下降勾配の方向に沿って進行すれば前記目標位置に到達するようなポテンシャル場を生成し、
前記経路計画部が計画する前記経路は、前記車両の代表点の位置からポテンシャルの最大下降勾配の方向に沿って進行する経路であり、
前記仮想誘導物は、前記目標位置に前記方位に従って前記車両の代表点が接近する方向以外の方向について前記目標位置を囲み、前記車両の代表点が前記目標位置に前記方位に従って到達することができる前記ポテンシャル場を生成できる形状である、
請求項1に記載の経路計画装置。
【請求項3】
前記経路計画部は、前記車両の代表点の位置及び前記目標位置を少なくとも含む領域における各位置に前記車両の排除度合いを示すコストを設定したコスト場を生成し、
前記経路計画部が計画する経路は、前記コスト場に基づいて前記車両の代表点の位置から前記目標位置までの前記コストの累積値が最小となる経路であり、
前記仮想誘導物は、前記目標位置に前記方位に従って前記車両の代表点が接近する方向以外の方向について前記目標位置を囲み、前記車両の代表点が前記目標位置に前記方位に従って到達することができる前記コスト場を生成できる形状である、
請求項1に記載の経路計画装置。
【請求項4】
前記初期処理部は、前記事前情報を取得する処理として、ユーザに前記事前障害物の配置を入力させ、入力された前記事前障害物の配置に基づいて前記事前配置情報を生成することにより前記事前配置情報を取得する、
請求項1~請求項3のいずれか1項に記載の経路計画装置。
【請求項5】
請求項1~請求項3のいずれか1項に記載の経路計画装置と、事前情報準備装置とを備える経路計画システムであって、
前記事前情報準備装置は、
前記車両のスタートの位置、前記スタートの位置における前記車両の姿勢、前記ゴールの位置、前記ゴールの位置における前記車両の姿勢、前記事前配置情報、前記車両の非ホロノミック拘束に対応する動作制約、及び前記車両の形状に基づいて、前記スタートの位置において前記スタートの位置における姿勢をとる前記車両が、少なくとも1つの前記切り返し点を経由して前記事前障害物に干渉せずに、前記ゴールの位置に前記ゴールの位置における姿勢で至るための事前経路を計画する事前経路計画部と、
前記事前経路に基づいて前記切り返し点の位置、前記ゴール及び前記切り返し点に到達するときの前記車両の進行方向の方位、並びに前記切り返し点が複数ある場合の到達順序を含む付属情報を生成する付属情報生成部と、
前記第1マージン距離及び前記第2マージン距離を設定するマージン設定部とを備えた、
経路計画システム。
【請求項6】
前記事前経路計画部は、ハイブリッドAスターアルゴリズムを用いて前記事前経路を計画する、
請求項5に記載の経路計画システム。
【請求項7】
前記事前経路計画部は、ユーザによって入力された経路を修正することにより前記事前経路を計画する、
請求項5に記載の経路計画システム。
【請求項8】
請求項1~請求項3のいずれか1項に記載の経路計画装置と、
前記区間内初期処理において計画された経路、及び前記区間内繰返し処理において経路が計画された場合には前記経路に沿って進行するよう前記車両を制御する車両制御装置と、
を備えた車両制御システム。
【請求項9】
コンピュータが、非ホロノミック拘束を持つ車両がゴールに至るための経路を計画する経路計画方法であって、
前記ゴールの位置、前記ゴールに至るまでに前記車両の進行方向を前進から後退又は後退から前進に切り替える1又は複数の切り返し点の位置、前記ゴール及び前記切り返し点に到達するときの車両の進行方向の方位、前記切り返し点が複数ある場合の到達順序、前記車両が障害物に接近しすぎないために用いる第1マージン距離、前記ゴール又は前記切り返し点に前記車両の代表点が前記方位に従って到達するように前記車両を誘導するために設置される仮想誘導物に前記車両が接近しすぎないために用いる第2マージン距離、並びに事前障害物が存在する場合には前記事前障害物の配置情報である事前配置情報を含む事前情報を取得するステップと、前記事前情報に基づいて最初に到達すべき前記切り返し点の位置を目標位置に設定するステップと、前記目標位置に前記仮想誘導物を設置する仮想誘導物設置ステップとを含む初期ステップと、
少なくとも前記車両の周辺に存在する前記障害物の配置情報である検出配置情報、並びに当該障害物の存在及び不存在が検出できた検出領域を示す情報を取得する検出情報取得ステップと、
前記車両の代表点の位置を取得する車両位置取得ステップと、
取得した前記検出配置情報及び前記初期ステップにおいて前記事前配置情報を取得した場合には前記検出領域外についての前記事前配置情報に基づいて、前記経路の計画に用いる計画対象障害物の配置情報である計画配置情報を生成する計画配置情報生成ステップと、
前記車両の代表点が前記計画対象障害物には前記第1マージン距離以内に接近することなく、前記仮想誘導物には前記第2マージン距離以内に接近することなく前記目標位置に至る経路を計画する経路計画ステップと、
前記車両が前記目標位置に到達した場合に前記目標位置が前記ゴールの位置でない場合は前記切り返し点の位置及び前記ゴールの位置のうち次に到達すべき位置に前記目標位置を更新し、更新した前記目標位置に前記車両を誘導するための前記仮想誘導物を設置する目標位置更新ステップと、
前記初期ステップを実行し、前記初期ステップの実行後、前記車両の代表点が前記目標位置に到達するまでの間に区間内初期ステップ及び区間内繰返しステップを行うこと、及び前記車両の代表点が前記ゴールの位置ではない前記目標位置に到達した場合には前記目標位置更新ステップを実行することを、前記車両の代表点が前記ゴールの位置に到達するまで繰り返す実行制御ステップとを備え、
前記区間内初期ステップは、前記検出情報取得ステップにより前記検出配置情報及び前記検出領域を示す情報を取得すること、前記車両位置取得ステップにより前記車両の代表点の位置を取得すること、前記計画配置情報生成ステップにより前記計画配置情報を生成すること、並びに前記計画配置情報及び前記車両の代表点の位置に基づいて前記経路計画ステップにより現時点における前記目標位置に至る経路を計画することを含み、
前記区間内繰返しステップは、前記車両の進行に伴い、前記検出情報取得ステップにより前記検出配置情報及び前記検出領域を示す情報を取得すること、前記車両位置取得ステップにより前記車両の代表点の位置を取得すること、前記計画配置情報生成ステップにより前記計画配置情報を生成すること、前回に生成された前記計画配置情報及び今回に生成された前記計画配置情報に基づいて前記計画対象障害物の配置の変化の有無を判定すること、並びに前記変化が有ると判定された場合には、今回に生成された前記計画配置情報及び前記車両の代表点の位置に基づいて前記経路計画ステップにより現時点における前記目標位置に至る経路を計画させることを繰り返すステップを含む、
経路計画方法。
【請求項10】
前記車両のスタートの位置、前記スタートの位置における前記車両の姿勢、前記ゴールの位置、前記ゴールの位置における前記車両の姿勢、前記事前配置情報、前記車両の非ホロノミック拘束に対応する動作制約、及び前記車両の形状に基づいて、前記スタートの位置において前記スタートの位置における姿勢をとる前記車両が、少なくとも1つの前記切り返し点を経由して前記事前障害物に干渉せずに、前記ゴールの位置に前記ゴールの位置における姿勢で至るための事前経路を計画する事前経路計画ステップと、
前記事前経路に基づいて前記切り返し点の位置、前記ゴール及び前記切り返し点に到達するときの前記車両の進行方向の方位、並びに前記切り返し点が複数ある場合の到達順序を含む付属情報を生成する付属情報生成ステップと、
前記第1マージン距離及び前記第2マージン距離を設定するマージン設定ステップと、
を備えた請求項9記載の経路計画方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路計画装置、経路計画システム、経路計画方法、経路計画プログラム、及び車両制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
非特許文献1には、車両の走行が想定される領域に存在している障害物の配置情報を予め取得しておき、車両がその障害物を避けながらゴールに至るまでに走行を一旦停止し進行方向を前進から後退又は後退から前進へ切り替える切り返し動作をさせてゴールの位置に到達する経路を計画する方法が開示されている。その手法はハイブリッドAスターと呼ばれる。
【0003】
特許文献1には、車両の走行中に障害物を検出したときに、その障害物を回避してゴールの位置に到達する経路をその走行中に計画する方法が開示されている。その経路計画にはポテンシャル法を用いている。
【先行技術文献】
【特許文献】
【0004】
特許第6051993号公報
【非特許文献】
【0005】
Dmitri Dolgov, Sebastian Thrun, Michael Montemerlo and James Diebel, "Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments," The International Journal of Robotics Research 2010 29: 485 originally published online 25 January 2010.
【発明の概要】
【発明が解決しようとする課題】
【0006】
車両の走行において、走行中に検出された障害物を回避しながらゴールの位置に到達させ、さらに、そのゴールの位置で車両に所定の姿勢を取らせたい場合がある。例えば、ゴールに到達後の車両に所定のタスクを実行するための姿勢を取らせたい場合等である。
【0007】
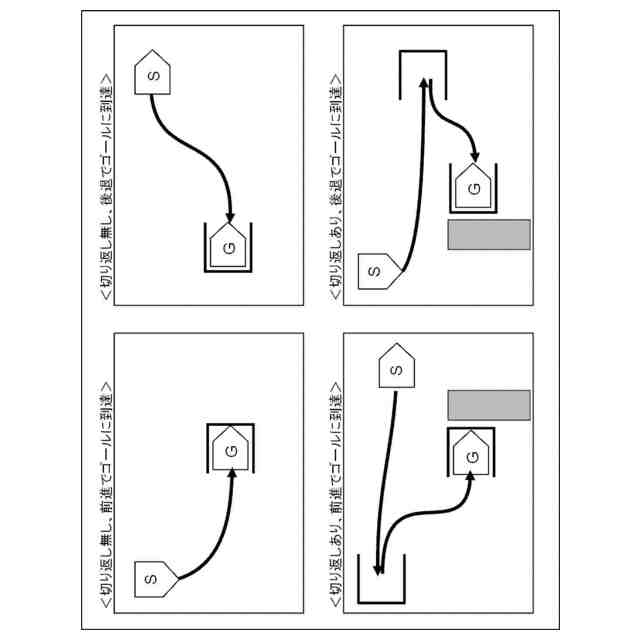
また、車両の移動機構としてステアリング機構や差動二輪機構を備えた非ホロノミック拘束を持つ車両が知られている。非ホロノミック拘束を持つ車両の進行方向は前進又は後退となり、横方向への進行はできない。
【0008】
非ホロノミック拘束を持つ車両がゴールの位置で所定の姿勢を取るには、切り返し動作が必要になる場合がある。例えば、ステアリング機構は、車両の位置はそのままで姿勢のみを変える「その場旋回」の動作ができず、かつ、前述のとおり横移動ができないため、スタートの位置からはスタートの姿勢における前後いずれかの進行方向に向かって出発しなければならず、またゴールの位置へはゴールで取りたい姿勢における前後いずれかの進行方向から到達しなければならない。また、差動二輪機構は、その場旋回ができる機構ではあるが、車両の形状が前後方向に長く、車両の周囲に障害物がある場合は、その場旋回をすると障害物と接触してしまうため、ステアリング機構と同様の問題となる。そして、スタートの位置及びゴールの位置における車両の前後方向のいずれかに障害物がある場合や経路全体の長さを短くしたい場合等は、それらが理由となってスタート及びゴールにおける進行方向を前後いずれかにするか決まることになる。その結果、スタートとゴールとの進行方向が異なる場合、ゴールに至るまでに進行方向を切り替えなければならない。
【0009】
進行方向を切り替える方法として、ステアリング機構はその場旋回ができないため切り返し動作が必要になる。また差動二輪機構でも、その場旋回ができない場所で進行方向を切り替えたい場合には切り返し動作が必要になる。
【0010】
非特許文献1に記載のハイブリッドAスターによれば、そのような切り返し動作を考慮した経路計画が可能である。しかし、この手法は計算量が大きいため経路計画を実行するための処理時間を長く必要とする。そのため、走行中に障害物を検出した場合にこの手法を用いて障害物を回避する経路を計画しようとしても、その処理が間に合わず緊急停止せざるを得なくなる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
電源回路
20日前
オムロン株式会社
電源回路
20日前
オムロン株式会社
電源回路
20日前
オムロン株式会社
電磁継電器
6日前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
情報提供装置
16日前
オムロン株式会社
スレーブ装置
16日前
オムロン株式会社
トリガスイッチ
16日前
オムロン株式会社
IOターミナル
16日前
オムロン株式会社
モータの監視装置
16日前
オムロン株式会社
端子折り曲げ治具
16日前
オムロン株式会社
導線折り曲げ治具
1か月前
オムロン株式会社
システムおよび方法
16日前
オムロン株式会社
電力開閉モジュール
16日前
オムロン株式会社
セーフティデバイス
16日前
オムロン株式会社
パワーコンディショナ
8日前
オムロン株式会社
リモート安全入出力装置
16日前
オムロン株式会社
電力システム及び制御装置
8日前
オムロン株式会社
支援システム及び支援方法
16日前
オムロン株式会社
保護継電器及び電力制御装置
16日前
オムロン株式会社
パワーコンディショナシステム
16日前
オムロン株式会社
情報処理装置及び情報処理方法
26日前
オムロン株式会社
給電モジュール及び給電システム
16日前
オムロン株式会社
計測装置、計測方法及びプログラム
16日前
オムロン株式会社
教育支援システム及び教育支援方法
16日前
オムロン株式会社
電力供給システム及び電力制御装置
16日前
オムロン株式会社
情報処理システムおよび情報処理方法
5日前
オムロン株式会社
検査装置、検査方法およびプログラム
26日前
オムロン株式会社
安全IOターミナルおよび安全システム
16日前
オムロン株式会社
交通管制システム、および動作切替方法
16日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
16日前
オムロン株式会社
生体情報処理装置及び動作情報処理装置
16日前
オムロン株式会社
監視システム、警報方法、及びプログラム
16日前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
5日前
オムロン株式会社
スレーブ装置およびネットワークシステム
16日前
オムロン株式会社
処理装置、処理方法、および処理プログラム
1日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ