TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128872
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025846
出願日
2024-02-22
発明の名称
配管用マーキング装置
出願人
株式会社三五
代理人
弁理士法人プロスペック特許事務所
主分類
B25H
7/04 20060101AFI20250827BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】被接続管の管端からの距離が確実に担保された位置にマーキングすることができる配管用マーキング装置を提供する。
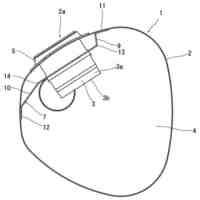
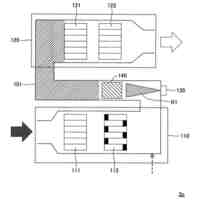
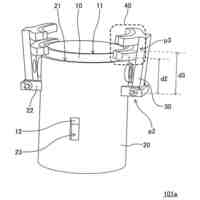
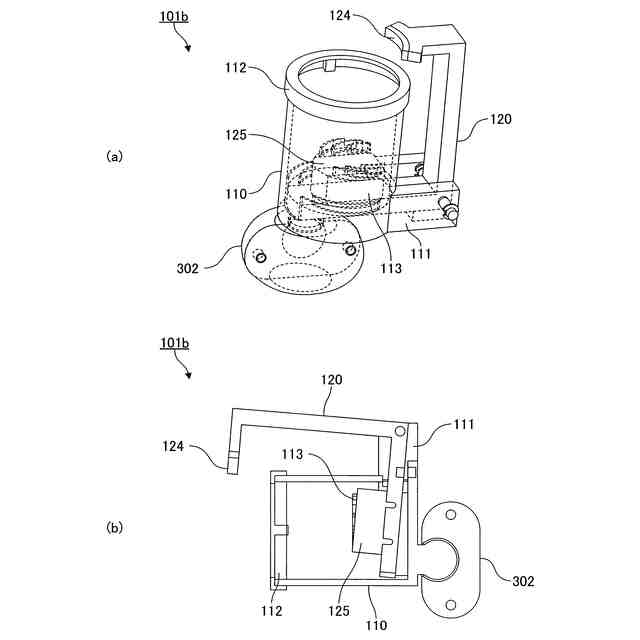
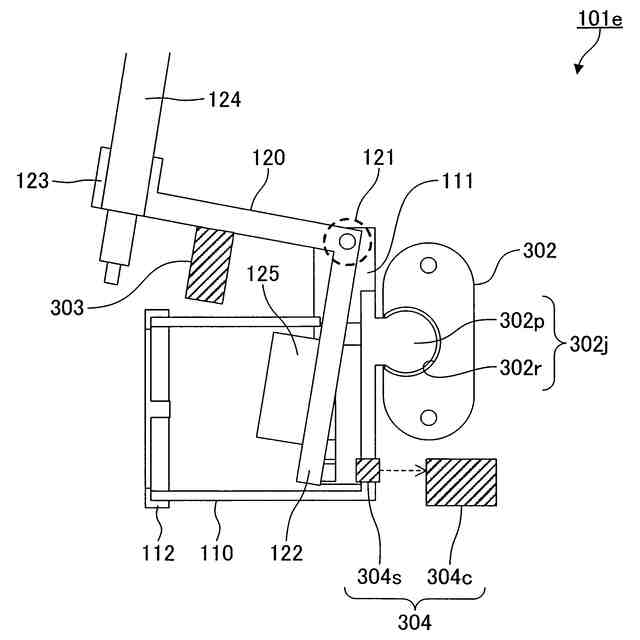
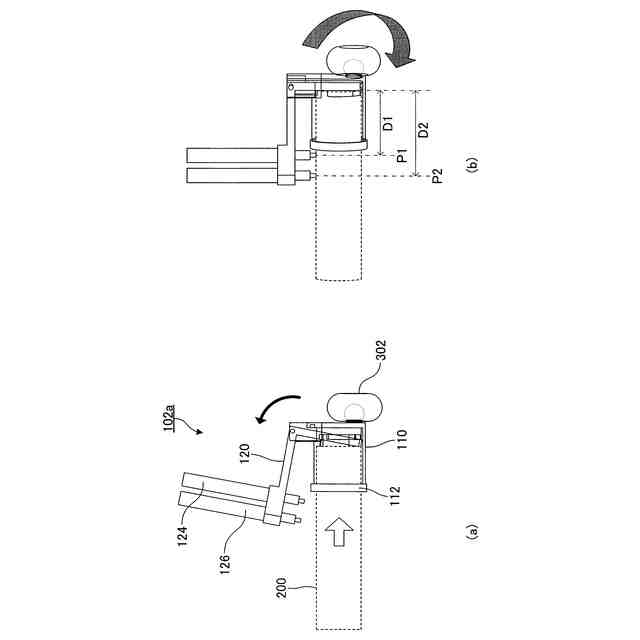
【解決手段】被接続管の外周面における所定の位置に所定の第1マークを付与する配管用マーキング装置であって、被接続管が摺動可能に嵌挿される有底筒状のケースとケースから径方向における外側に向かって立設された支持部によってケースの軸方向と平行な平面内において回動自在に屈曲部を軸支されたL字状のアームとを備え、アームの一端はケースに設けられた孔を通してケースの内部に配置され、アームの他端には第1マークを付与する第1マーカーが取り付けられており、ケースの内部に被接続管が所定の深さだけ挿入されて被接続管の先端がアームの一端を押すことによりアームが回動してケースの底部とは反対側の開口部から突出している被接続管の外周面における所定の位置に第1マーカーが当接するように構成されている。
【選択図】図2
特許請求の範囲
【請求項1】
被接続管の外周面において前記被接続管の端面から所定の距離である第1距離だけ離れた位置である第1マーキング位置に所定の印である第1マークを付与する配管用マーキング装置であって、
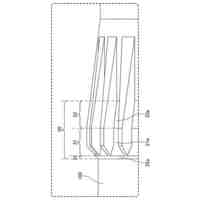
前記被接続管が摺動可能に嵌挿される有底筒状のケースと、
前記ケースから径方向における外側に向かって立設された支持部によって前記ケースの軸方向と平行な平面内において回動自在に屈曲部を軸支されたL字型の形状を有するアームと、
を備え、
前記アームの一端は前記ケースに設けられた孔を通して前記ケースの内部に配置されており、
前記アームの他端には前記第1マークを付与する手段である第1マーカーが取り付けられており、
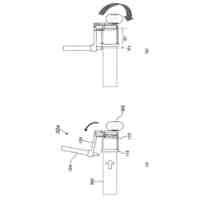
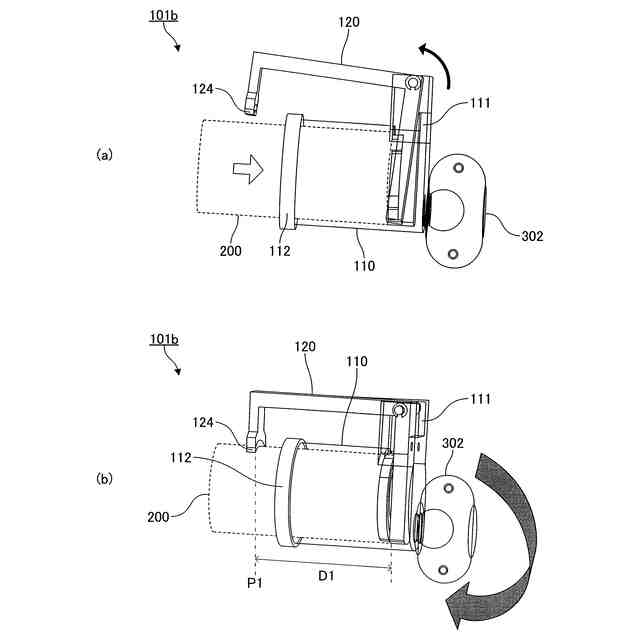
前記ケースの内部に前記被接続管が所定の深さだけ挿入されて前記被接続管の先端が前記アームの前記一端を押すことにより前記アームが回動して前記ケースの底部とは反対側の端部にある開口部から突出している前記被接続管の前記外周面における前記第1マーキング位置に前記第1マーカーが当接している状態であるマーキング状態が達成されるように構成されている、
配管用マーキング装置。
続きを表示(約 830 文字)
【請求項2】
請求項1に記載された配管用マーキング装置であって、
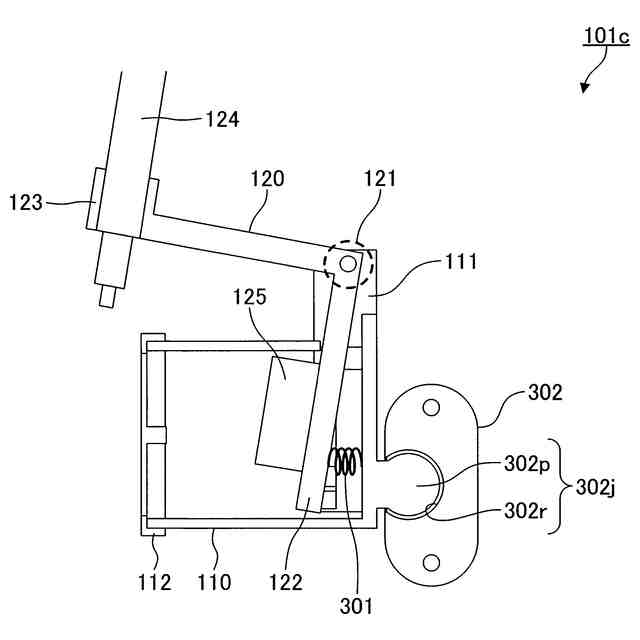
前記被接続管の前記外周面から前記第1マーカーが離隔するように前記アームを回動付勢する手段である離隔付勢手段、
前記ケースに設けられ且つ手動にて前記被接続管と前記ケースとを前記ケースの軸の周りに相対的に回動させるために前記配管用マーキング装置のユーザによって操作される部材である回動操作手段、
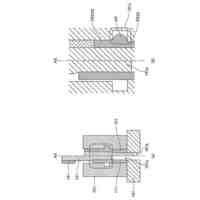
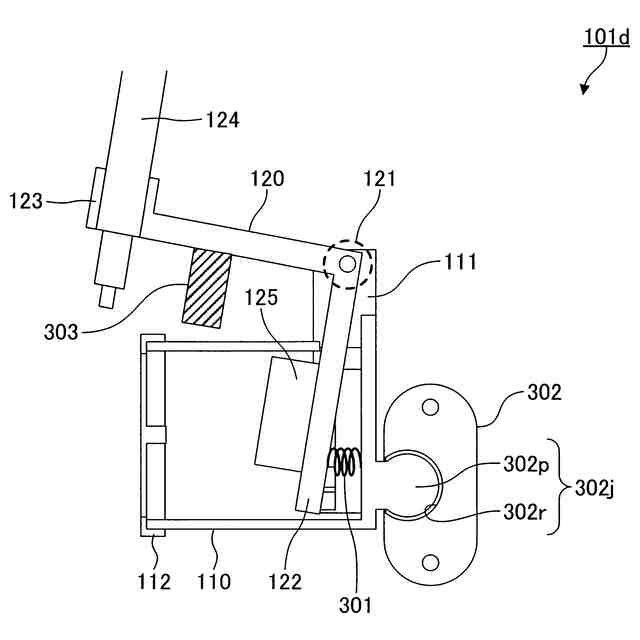
(前記ケース又は前記支持部と前記アームとの間に挟持されたりして)前記アームの回動範囲を制限することにより前記マーキング状態における前記第1マーカーの先端と前記第1マーキング位置との位置関係を所定の位置関係に定める手段である回動制限手段、及び
前記マーキング状態が達成されたか否かを検出する手段であるマーキング検出手段、
からなる群より選ばれる少なくとも1つの手段を更に備える、
配管用マーキング装置。
【請求項3】
請求項1又は請求項2に記載された配管用マーキング装置であって、
前記アームの他端には、前記第1マーカーに加えて、前記ケースの軸方向において前記第1距離とは異なる所定の距離である第2距離だけ前記被接続管の前記端面から離れた所定の位置である第2マーキング位置に所定の印である第2マークを付与する手段である第2マーカーが取り付けられており、
前記マーキング状態において前記第2マーキング位置に前記第2マーカーが当接するように構成されている、
配管用マーキング装置。
【請求項4】
請求項3に記載された配管用マーキング装置であって、
前記マーキング状態において、前記第1マーキング位置と前記第2マーキング位置とが前記ケースの軸方向のみならず周方向においても異なる位置となるように前記第1マーカー及び前記第2マーカーが配置されている、
配管用マーキング装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、配管用マーキング装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
配管の接続施工時においては、継手及び/又は機器等への被接続管の挿入代を適正に設定する必要があることから、適正な挿入代を示す印(例えば、ラインマーク等)を被接続管の外周面に付しておくことが慣用的に行われている。上記印が適正に付されていれば、施工時に継手等の端部と上記印とが所定の位置関係にある(例えば、両者が合致する等)ことを目視する等して、適正な挿入代にて被接続管が挿入されていることを作業者が確認した上で、カシメや螺合等の締結作業を施すことができる。
【0003】
例えば、特許文献1(実開昭52-139591号公報)には、被接続管の管端にスケールの一端に設けられたストッパ(突説部)を係止すると共にスケールの他端側の所定の位置に取り付けられたマーキングペンによって被接続管の外周面に挿入目安線(ラインマーク)を付与する工具が開示されている。また、特許文献2(特開平2-57788号公報)には、(従来技術として)管継手に接続される被接続管の端部を突き当てゲージに当接させた状態にて被接続管を回転させて2本のラインマークを描画する工具が開示されている。
【0004】
しかしながら、上記従来技術の何れにおいても、被接続管とスケールとの係止状態及び被接続管のゲージへの当接状態が適正でなければ、被接続管の外周面においてラインマークが付与される位置(管端からの距離)もまた適正ではなくなってしまうという問題がある。このように、当該技術分野においては、ラインマークを適正な位置に確実に付与することができる描画工具が求められている。
【先行技術文献】
【特許文献】
【0005】
実開昭52-139591号公報
特開平2-57788号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述したように、当該技術分野においては、ラインマークを適正な位置に確実に付与することができる描画工具が求められている。従って、本発明の1つの目的は、被接続管の管端からの距離が確実に担保された位置にマーキングすることができる配管用マーキング装置を提供することである。
【課題を解決するための手段】
【0007】
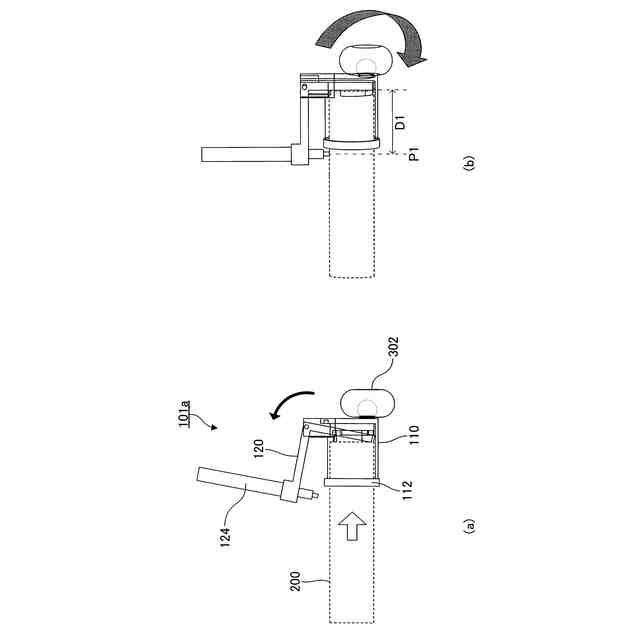
そこで、本発明者は鋭意研究の結果、有底筒状のケースに適正に挿入された被接続管の先端によってアームの一端を押圧してアームを回動させてアームの他端に取り付けられたマーカーを被接続管の外周面の所定の位置に当接させることにより、上記課題を解決することができることを見出した。
【0008】
具体的には、本発明に係る配管用マーキング装置(以降、「本発明装置」と称呼される場合がある。)は、被接続管の外周面において被接続管の端面から所定の距離である第1距離だけ離れた位置である第1マーキング位置に所定の印である第1マークを付与する配管用マーキング装置である。
【0009】
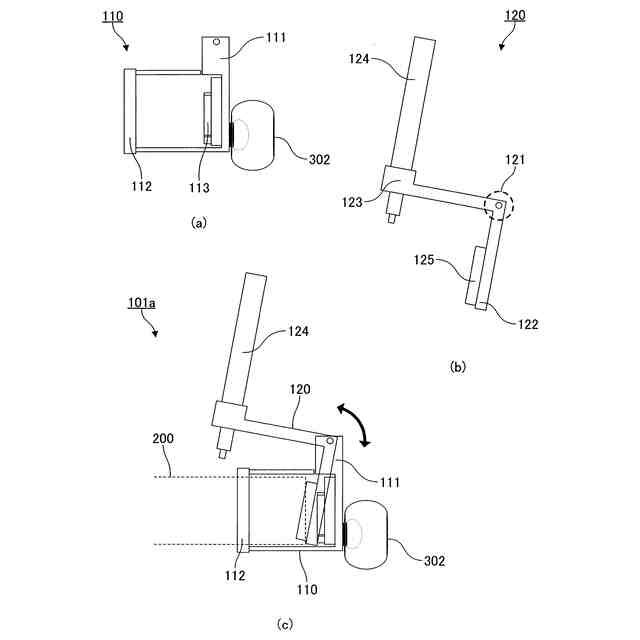
本発明装置は、被接続管が摺動可能に嵌挿される有底筒状のケースと、ケースから径方向における外側に向かって立設された支持部によってケースの軸方向と平行な平面内において回動自在に屈曲部を軸支されたL字型の形状を有するアームと、を備える。
【0010】
また、アームの一端はケースに設けられた孔を通してケースの内部に配置されている。更に、アームの他端には第1マークを付与する手段である第1マーカーが取り付けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社三五
消音器
2か月前
株式会社三五
排気装置
2か月前
株式会社三五
排気浄化装置
1日前
株式会社三五
ドライブシャフト
1か月前
株式会社三五
筒状部材の形成方法
1か月前
株式会社三五
配管用マーキング装置
14日前
株式会社三五
配管用マーキング装置
2か月前
株式会社三五
二重テーパ部の製造方法
3か月前
株式会社三五
ハイブリッド車の排気システム
2日前
株式会社三五
テーパ部を有する円筒体の成形方法
16日前
株式会社三五
フランジ部を有する中空部材の形成方法
1か月前
株式会社三五
スプラインの形成装置及びスプラインの形成方法
2か月前
株式会社三五
差厚パイプの押出成形装置及び差厚パイプの押出成形方法
23日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
16日前
トヨタ自動車株式会社
学習装置
1日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
25日前
株式会社マキタ
ハンマドリル
25日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社安川電機
ロボット
22日前
株式会社三共コーポレーション
工具保持具
16日前
株式会社不二越
垂直多関節ロボット
1日前
トヨタ自動車株式会社
ロボットハンド
22日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
作業機
28日前
ニデックインスツルメンツ株式会社
産業用ロボット
14日前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
電動工具
1日前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
川崎重工業株式会社
監視システム
1か月前
株式会社ケイズベルテック
物品定量取り分け装置
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ