TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025123065
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018919
出願日
2024-02-09
発明の名称
シミュレータの開発方法、情報処理システム及びプログラム
出願人
国立大学法人東京科学大学
代理人
個人
主分類
G06F
30/28 20200101AFI20250815BHJP(計算;計数)
要約
【課題】必要な計算量を削減することに寄与するシミュレータの開発方法、情報処理システム及びプログラムを提供すること。
【解決手段】本開示の一実施の形態にかかるシミュレータの開発方法は、飛行体の胴体周辺の空間を、計算格子を用いて離散化し、離散化された流体方程式を解くことで空力計算の数値計算手法を適用するステップと、飛行体のブレードに対してアクチュエータラインモデルを適用するステップと、数値計算手法の適用結果と、ブレードに対するアクチュエータラインモデルの適用結果と、を用いることで飛行体の航行をシミュレートするステップと、をコンピュータが実行するものである。
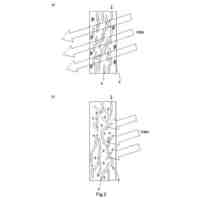
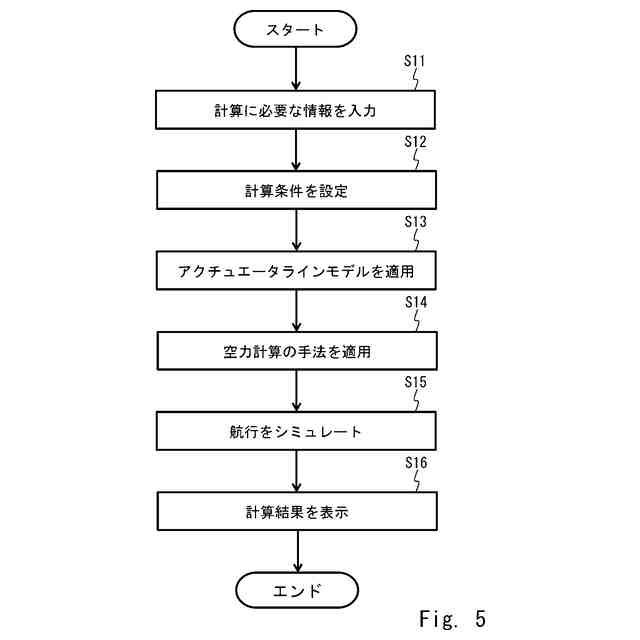
【選択図】図5
特許請求の範囲
【請求項1】
飛行体の胴体周辺の空間を、計算格子を用いて離散化し、離散化された流体方程式を解くことで空力計算の数値計算手法を適用するステップと、
前記飛行体のブレードに対してアクチュエータラインモデルを適用するステップと、
前記数値計算手法の適用結果と、前記ブレードに対する前記アクチュエータラインモデルの適用結果と、を用いることで前記飛行体の航行をシミュレートするステップと、
をコンピュータが実行するシミュレータの開発方法。
続きを表示(約 1,200 文字)
【請求項2】
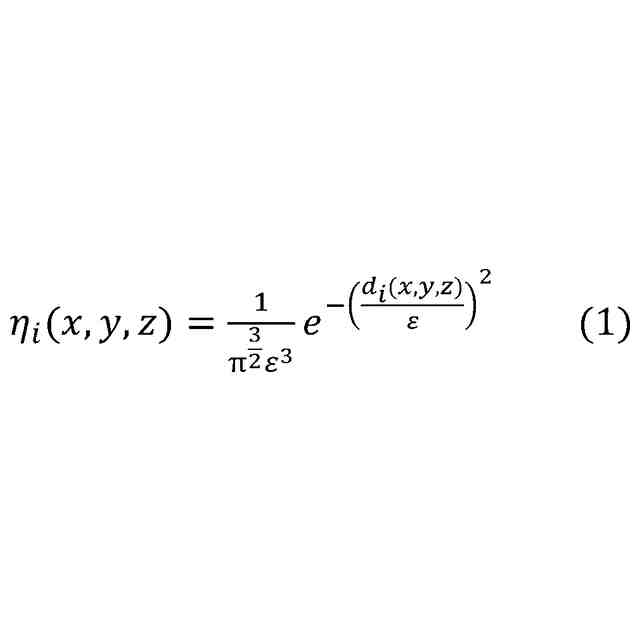
前記コンピュータは、前記ブレードを構成するマーカー粒子の間隔、又はガウシアンフィルタの影響半径のパラメータ、の少なくともいずれかの情報の入力を受け付け、前記アクチュエータラインモデルの適用において受け付けた前記情報を使用する、
請求項1に記載のシミュレータの開発方法。
【請求項3】
前記コンピュータは、前記ブレードの直径の1000分の1以上のサイズの計算格子を、前記ブレード周辺の計算領域において、前記アクチュエータラインモデルの適用に用いる、
請求項1又は2に記載のシミュレータの開発方法。
【請求項4】
飛行体の胴体周辺の空間を、計算格子を用いて離散化し、離散化された流体方程式を解くことで空力計算の数値計算手法を適用する第1適用部と、
前記飛行体のブレードに対してアクチュエータラインモデルを適用する第2適用部と、
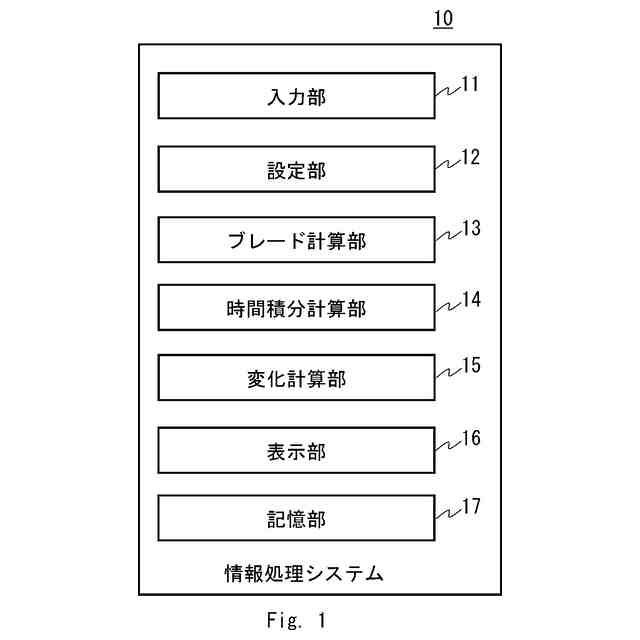
前記数値計算手法の適用結果と、前記ブレードに対する前記アクチュエータラインモデルの適用結果と、を用いることで前記飛行体の航行をシミュレートするシミュレータ部と、を備える
情報処理システム。
【請求項5】
前記ブレードを構成するマーカー粒子の間隔、又はガウシアンフィルタの影響半径のパラメータ、の少なくともいずれかの情報の入力を受け付ける入力部を更に備え、
前記シミュレータ部は、前記アクチュエータラインモデルの適用において受け付けた前記情報を使用する、
請求項4に記載の情報処理システム。
【請求項6】
前記シミュレータ部は、前記ブレードの直径の1000分の1以上のサイズの計算格子を、前記ブレード周辺の計算領域において、前記アクチュエータラインモデルの適用に用いる、
請求項4又は5に記載の情報処理システム。
【請求項7】
飛行体の胴体周辺の空間を、計算格子を用いて離散化し、離散化された流体方程式を解くことで空力計算の数値計算手法を適用するステップと、
前記飛行体のブレードに対してアクチュエータラインモデルを適用するステップと、
前記数値計算手法の適用結果と、前記ブレードに対する前記アクチュエータラインモデルの適用結果と、を用いることで前記飛行体の航行をシミュレートするステップと、
をコンピュータに実行させるプログラム。
【請求項8】
前記コンピュータに、前記ブレードを構成するマーカー粒子の間隔、又はガウシアンフィルタの影響半径のパラメータ、の少なくともいずれかの情報の入力を受け付け、前記アクチュエータラインモデルの適用において受け付けた前記情報を使用させる、
請求項7に記載のプログラム。
【請求項9】
前記コンピュータに、前記ブレードの直径の1000分の1以上のサイズの計算格子を、前記ブレード周辺の計算領域において、前記アクチュエータラインモデルの適用に使用させる、
請求項7又は8に記載のプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、シミュレータの開発方法、情報処理システム及びプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
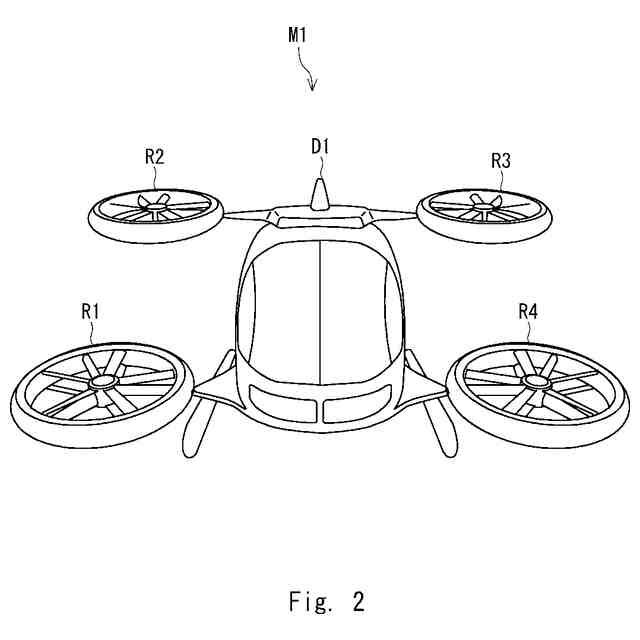
飛行機は、その開発段階において、安全な飛行が可能かどうかを検証する必要がある。特に、近年実用化されつつある空飛ぶクルマ等の新しいタイプの有人飛行体については、このような飛行体が新しい技術であり、かつ搭乗する人間の安全性を確保する必要があるため、より慎重な安全性の検証が必要となる。
【0003】
実験では設定が非常に困難な航行条件があったり、検証すべき航行条件の数が膨大であったりするため、実機又は模型を用いて現実の検証実験を行うことには限界がある。また、実験では測定できない内容もあるため、コンピュータ上の数値シミュレーションを用いた検証がなされることが多い。シミュレーションには、例えば、数値流体力学の手法が用いられる。
【0004】
特に、空飛ぶクルマは、無人機と比較して、非常に高い航行安全性が求められる。例えば、複数のマルチコプターが接近(特に上下方向において接近)する場合、マルチコプターが建物等に接近する場合、いずれかのローターが異常な回転(例えば停止)をする場合、予期せぬ強風が発生する場合等の状況が想定される。シミュレーションを実行することで、このような状況において、マルチコプターがどのようにして姿勢を立て直し安全な航行を維持するかを発見することが可能になる。また、シミュレーションを実行することで、安全性を向上させる新しいローターの配置(又は追加)等の検証、及び検証結果の設計への反映も可能となる。
【0005】
関連技術として、非特許文献1には、都市交通システムに用いられるクワッドローターのエアタクシーに対して、数値流体力学シミュレーションを適用する技術が開示されている。
【先行技術文献】
【非特許文献】
【0006】
Patricia Ventura Diaz and Seokkwan Yoon, “High-Fidelity Simulations of a Quadrotor Vehicle for Urban Air Mobility”, AIAA SciTech Forum 2022, January 3-7, 2022, San Diego, CA & Virtual
【発明の概要】
【発明が解決しようとする課題】
【0007】
マルチコプター等の飛行体では、飛行時に、ローターを構成する、薄く細いローターブレード(回転翼;以下、単にブレードとも記載する)が高速に回転する。このような飛行体に対して、シミュレーションを行うために計算格子を用いて空間を離散化し、流体方程式を直接数値計算する方法を適用することが考えられる。この場合、ブレード表面近傍には非常に細かい計算格子を配置する必要があることから、計算に用いる総計算格子点数が膨大となる。そのため、計算の各時間ステップにおいてブレードにかかる力(すなわち推力)および周囲の空気の流れの変化を求めるために膨大な計算量が必要になる。
【0008】
また、計算の1時間ステップは、非常に短い時間間隔となる。したがって、コンピュータは、機体の並進・回転・姿勢の変化といった航行の振舞いを確認できる程度の期間(例えば1~2分)までシミュレーションの計算をすることが極めて困難になる。例えば、スーパーコンピュータを使って上記の数値シミュレーションを実行した場合でも、せいぜいブレードが30回転する時間(例えば2~3秒)までしか、シミュレーションする時間を進めることができないという課題があった。非特許文献1に記載の数値流体力学シミュレーションはブレードの回転により得られる推力を計算する目的でなされており、機体の航行を計算するものではなかった。
【0009】
本発明は、このような問題点に鑑みてなされたものであり、必要な計算量を削減することに寄与するシミュレータの開発方法、情報処理システム及びプログラムを提供するものである。
【課題を解決するための手段】
【0010】
本発明の一態様に係るシミュレータの開発方法は、
飛行体の胴体周辺の空間を、計算格子を用いて離散化し、離散化された流体方程式を解くことで空力計算の数値計算手法を適用するステップと、
前記飛行体のブレードに対してアクチュエータラインモデルを適用するステップと、
前記数値計算手法の適用結果と、前記ブレードに対する前記アクチュエータラインモデルの適用結果と、を用いることで前記飛行体の航行をシミュレートするステップと、
をコンピュータが実行するものである。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人東京科学大学
クリーム
4か月前
国立大学法人東京科学大学
通信装置
1か月前
国立大学法人東京科学大学
電波吸収体
2か月前
国立大学法人東京科学大学
半導体装置
2か月前
国立大学法人東京科学大学
半導体装置
3か月前
国立大学法人東京科学大学
バラン回路
1か月前
国立大学法人東京科学大学
非線形回路
1か月前
国立大学法人東京科学大学
電波吸収体
2か月前
国立大学法人東京科学大学
制御システム
2か月前
国立大学法人東京科学大学
光化学センサ装置
2か月前
国立大学法人東京科学大学
チューニング装置
1か月前
国立大学法人東京科学大学
引張試験装置、及び試験片
1か月前
国立大学法人東京科学大学
積層造形樹脂部品嵌合接合体
4か月前
NTT株式会社
光デバイス
2か月前
国立大学法人東京科学大学
情報処理方法及びプログラム
1か月前
国立大学法人東京科学大学
食品に曵糸性を付与する乳酸菌
5か月前
国立大学法人東京科学大学
受光装置および光給電システム
1か月前
国立大学法人東京科学大学
複合酸化物パターンの形成方法
2か月前
国立大学法人東京科学大学
歯科医療用部材とその製造方法
5か月前
国立大学法人東京科学大学
歩行改善装置および歩行改善方法
5か月前
国立大学法人東京科学大学
押込試験装置、及び押込試験方法
1か月前
国立大学法人東京科学大学
燃料デブリの固化方法および固化体
1か月前
国立大学法人東京科学大学
振動センサ及び振動数検出システム
1か月前
国立大学法人東京科学大学
メタン製造方法及びメタン製造装置
4か月前
国立大学法人東京科学大学
電波反射特性推定装置及びプログラム
3か月前
国立大学法人東京科学大学
蛍光繊維体及び蛍光繊維体の製造方法
5か月前
国立大学法人東京科学大学
シミュレーション装置及びプログラム
3か月前
国立大学法人東京科学大学
受信アンテナ装置、及び送信アンテナ装置
4か月前
スタンレー電気株式会社
有機半導体装置
5か月前
国立大学法人東京科学大学
ガラスアクチュエータ素子及びその製造方法
2か月前
国立大学法人東京科学大学
強磁性材料、薄膜及び強磁性材料の製造方法
3か月前
トヨタ自動車株式会社
フッ化物イオン電池
1か月前
国立大学法人東京科学大学
ジアセチル計測方法及びジアセチル計測装置
10日前
国立大学法人東京科学大学
計測装置、計測方法、及び、制御プログラム
10日前
学校法人早稲田大学
太陽光発電モジュール
1か月前
AGC株式会社
調光デバイスおよび調光方法
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ