TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115942
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024215231
出願日
2024-12-10
発明の名称
電子制御デバイスのシャフトの軸方向変位または軸方向位置を決定する方法
出願人
ウーテーアー・エス・アー・マニファクチュール・オロロジェール・スイス
代理人
個人
主分類
G04G
21/00 20100101AFI20250731BHJP(時計)
要約
【課題】電子制御デバイスのシャフトの軸方向変位または軸方向位置を決定する方法を提供すること。
【解決手段】本発明は、電子制御デバイス(1)の計時器の設定ステム(3)など、磁化されたシャフトの軸方向変位または軸方向位置を決定する方法に関する。この方法は、磁化されたシャフトによって生成される磁場のノルムに、シャフトの回転軸に直交する平面におけるシャフトの回転角度のみに依存する選択された補償関数を乗じることによって得られる新たな関数に基づく。補償関数を導入する主な利点は、異なる角度位置に対応する多数の異なる曲線を格納する必要もなく、軸の変位/位置を決定するためにノルムを直接使用することも必要とされないので、測定の処理を簡素化し、必要なメモリリソースをしっかりと最小化できることである。前記新たな関数を使用する提案された方法を適用することによって、好ましくは単一の磁気センサを使用することによって、シャフトの軸方向変位/位置を十分正確に検出できる。
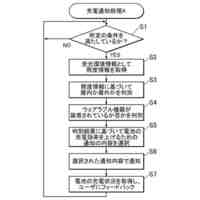
【選択図】図4
特許請求の範囲
【請求項1】
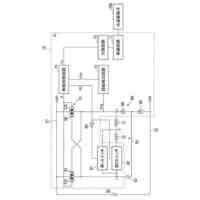
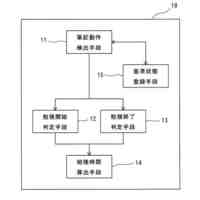
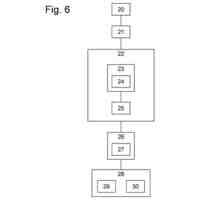
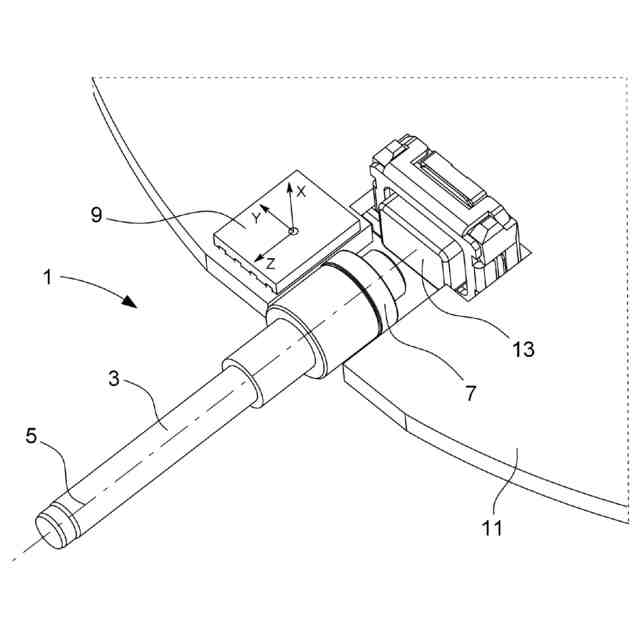
永久磁化部分(7)を備え、変位軸の周りを回転するシャフト(3)の、前記変位軸(5)に沿った軸方向変位または軸方向位置、または、前記シャフトの前記軸方向変位または軸方向位置に応じた所定の機能または動作の制御値を、電子制御モジュールを集合的に形成する磁気センサ配置(9)および処理ユニットによって決定する方法であって、前記方法は、前記電子制御モジュールによって実行される以下のステップ、すなわち、
- 前記磁気センサ配置を用いて、前記永久磁化部分によって生成される磁場の第1、第2、および第3の磁場成分を、それぞれ前記磁気センサ配置にリンクされた直交する第1の軸と、第2の軸と、前記変位軸に平行な第3の軸とに沿って測定し、これら第1、第2、および第3の磁場成分を、硬化鉄係数について補償するステップ(101)と、
- 補償された前記第1および第2の磁場成分に基づいて、前記シャフト(3)の前記変位軸(5)に直交する平面における前記シャフト(3)の現在の回転角度の値(θ
c
)を決定するステップ(102)と、
- 補償された前記第1、第2、および第3の磁場成分に基づいて、前記磁場のノルム(N
c
)を二乗または非二乗として計算するステップであって、前記ノルムは、前記変位軸(5)に沿った前記シャフトの前記軸方向位置と、前記シャフト(3)の前記回転角度とに依存する、ステップ(103)と、
- 前記シャフト(3)の前記回転角度(θ)に依存するが、前記シャフトの前記軸方向変位または軸方向位置(z)には依存しない補償関数F(θ)を選択するステップ(104)と、
- 前記現在の回転角度の値(θ
c
)を前記補償関数に適用することによって、前記現在の回転角度の値のために、補償関数値と称される第1の値(V
c
)を決定するステップ(105)と、
- 前記磁場の前記計算されたノルム(N
c
)と、前記決定された補償関数値(V
c
)とを乗じることによって、第2の値(g
c
)を計算するステップであって、前記補償関数は、前記第2の値が主に前記シャフトの前記軸方向位置に依存し、前記シャフトの前記回転角度にあまり依存しないか、または依存しないように選択される、ステップ(106)と、
- 第1のセットの可能な第2の値と、第2のセットの可能な軸方向変位または軸方向位置または/および制御値との関係を、前記可能な軸方向変位または軸方向位置に応じて選択し、前記第1のセットの各第2の値のために、前記シャフトの対応する軸方向変位または軸方向位置、または前記シャフトの軸方向変位または軸方向位置の対応する範囲、または対応する制御値を確立するステップ(107)と、
- 前記計算された第2の値(g
c
)を、前記第1のセットと前記第2のセットとの、前記選択された関係に適用することによって、前記磁気センサ配置(9)に対する前記シャフトの前記軸方向変位または軸方向位置、または前記制御値を決定するステップ(108)とを備える、方法。
続きを表示(約 1,300 文字)
【請求項2】
前記第1のセットと前記第2のセットとの関係を選択する前記ステップは、前記シャフト(3)の可能な安定軸方向位置の各安定軸方向位置のために、第2の値の対応する範囲を確立する、請求項1に記載の方法。
【請求項3】
前記第2の値の範囲は、第2の値の範囲が、他の範囲と重ならないように明確に区別される、請求項2に記載の方法。
【請求項4】
前記関係を選択するステップは、前記第2の値に対するしきい値(g
Th
)を定義するステップを備え、前記軸方向変位または前記軸方向位置または前記制御値を決定するステップは、前記第2の値が前記しきい値以下の場合、前記シャフト(3)の前記回転角度の決定を無効にするか無視するステップを備える、請求項1に記載の方法。
【請求項5】
前記関係を選択するステップにおける前記制御値は、前記シャフトおよび前記電子制御モジュールを備える電子制御デバイスを組み込んだ計時器の機能のために、前記シャフトの前記軸方向変位または軸方向位置に応じて強度調整を提供する、請求項1に記載の方法。
【請求項6】
前記補償関数は、前記シャフトの前記軸方向変位または位置がどのように使用されるかに基づいて選択される、請求項1から請求項5のいずれか一項に記載の方法。
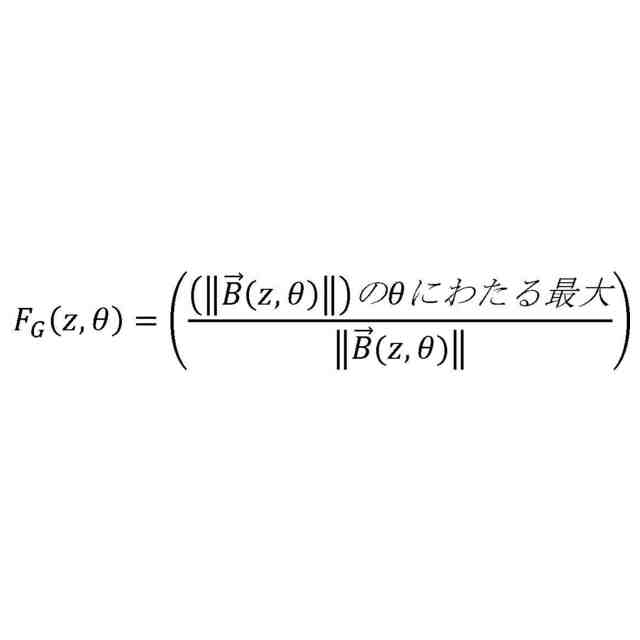
【請求項7】
前記補償関数F(θ)は、
JPEG
2025115942000008.jpg
16
170
のzにわたる平均のとおりであり、ここで、zは、前記シャフト(3)の前記回転軸(5)に沿った前記軸方向変位または軸方向位置を示し、θは、前記回転軸(5)に直交する平面における前記シャフト(3)の前記回転角度を示し、
JPEG
2025115942000009.jpg
13
25
は、前記磁場を示す、請求項2または請求項3に記載の方法。
【請求項8】
前記補償関数F(θ)は、
JPEG
2025115942000010.jpg
16
170
のとおりであり、ここで、θは、前記回転軸(5)に直交する平面における前記シャフト(3)の前記回転角度を示し、z=Pは、軸方向変位が検出される前記シャフト(3)の前記回転軸(5)に沿った所定の軸方向変位または軸方向位置を示し、
JPEG
2025115942000011.jpg
13
25
は、前記磁場を示す、請求項4に記載の方法。
【請求項9】
前記軸方向位置P=0である、請求項8に記載の方法。
【請求項10】
前記磁気センサ配置は、3軸磁力計(9)であるか、または、おのおのが前記磁場成分のうち異なる1つの磁場成分を判定するように構成された3つのセンサによって形成される、請求項1から請求項5、請求項8、および請求項9のいずれか一項に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
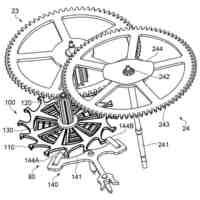
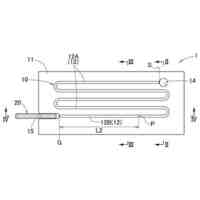
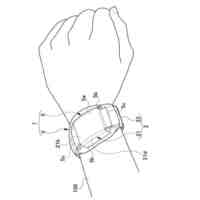
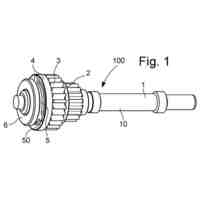
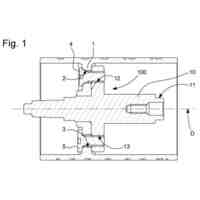
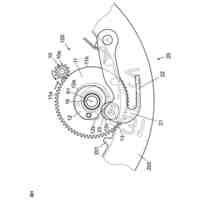
本発明は、電子制御デバイスのシャフトの軸方向変位または軸方向位置を決定する方法に関する。シャフトは、たとえば計時器の設定ステムであり得る。本発明は、磁力計を備える電子制御モジュールに関連付けられた磁気リューズステムに焦点を当てており、ここでは、ステムの軸方向位置/変位を決定するために、ステムに取り付けられた磁石の磁場が測定される。本発明は、この方法を実行するように構成された装置にも関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
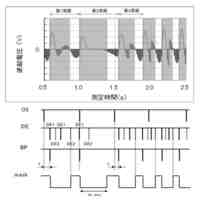
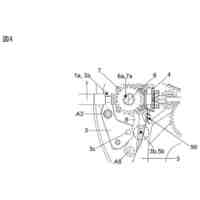
第1のタイプの電子式リューズステムでは、ステムの軸方向位置は通常、T1,T2およびT3と呼ばれるステムの安定した機械的位置で開閉する電気接点によって決定され、ここで、T1は休止位置、T2は日付設定位置、およびT3は時刻設定位置を指す。電子制御デバイスが、ステムを、押しボタンとしても動作できるようにする場合、さらなる位置T0が定義され、これは、リューズが押され、ステムが端部電気接点と接触している位置を指す。これら電気接点は、ステムと接触している比較的複雑な多数の部品によって機械的に始動される。
【0003】
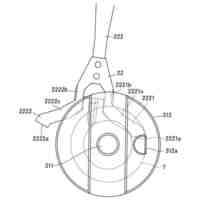
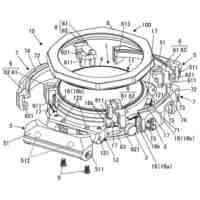
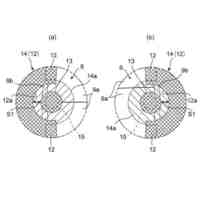
リューズステムの回転を検出するための磁石を備えた特定の電子制御デバイスでは、磁石は、ステムが動いたときに軸方向位置を維持するために、スライド部分を形成する。スライド部分は、正方形の側面の中央穴を有し、ステムは、対応する正方形の断面を有する少なくとも一部を備え、この部品が、正方形の穴を通過するため、磁石は、ステムによって回転駆動される。上記の解決策の主な欠点は、ステムの安定した位置と同じ数の電気接点が必要とされることである。電気接点は、時間の経過とともに酸化されてはならず、衝撃に耐える必要がある。さらに、機械部品の数が多く、それらの組立ては比較的複雑で高価である。
【0004】
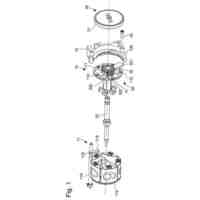
磁気システムを有する第2のタイプの電子式リューズステムでは、磁石がステムに取り付けられ、ステムとともに軸方向および回転方向に動く。ステムの回転検出は、磁力計を使用して位置T1で実施される。リューズを押すと、エンドスイッチ(位置T0)がアクティブになる。このように、リューズステムは、プッシャとして使用され、スイッチが押されると、リューズステムが位置T0にあると判定できる。リューズを押してスイッチをアクティブにすると、ステムの回転が磁力計によってまだ検出されている間に、ステムが意図せず回転することがよくある。この意図せぬ回転は、腕時計によって、スイッチを押す(選択された項目を入力するための検証)前に行われるべきアクション(たとえば、表示されたメニューの選択項目を変更すること)として解釈できる。
【0005】
欧州特許第3210083号明細書は、制御ステムに固定して取り付けられた磁石の角度位置を検出するための方法に関するもので、この磁石は直径方向に磁化されている。磁石の軸方向位置の検出は、ごく簡単に言及されているだけで、説明されていない。欧州特許第3210083号明細書で提案されている方法は、磁石によって生成される磁場の3つの磁場成分の測定に基づいており、磁場ベクトルは、図1に図示されるように、磁石の異なる軸方向位置と完全な回転に対して楕円を描く。これらの楕円が2次元(2D)平面(X-Y)に投影されると、結果として得られる2D曲線は、図2に図示されるように楕円形のままである。制御ステムの角度位置を正確に決定するためには、代わりにX-Y平面に円形の曲線が必要である。この目的のために、磁場ベクトルは、所定の変換行列を使用することによって、2次元(2D)平面X-Yに投影される。しかしながら、図3に見られるように、事前に選択された変換行列の場合、投影は、磁石/ステムの所定の軸方向位置に対してのみ円を描く。他の軸方向位置に対する投影は、楕円を描く。欧州特許第3210083号明細書では言及されていないが、この特許文献の図3に図示されている、軸方向変位/位置の検出のために使用される2つの円の半径を仮定することができる(ロッド、したがって、磁石が、磁気センサ/磁力計から離れるにつれて半径が小さくなる)。しかしながら、前述のように、円は、事前に選択された変換行列を用いて、特定の軸方向位置に対してのみ取得される。したがって、他のすべての軸方向位置では、先ず、ステムの回転角度の値の検出に不正確さがあり、次に、投影された測定された磁場ベクトルの長さは、回転角度にも依存するため、正確な軸方向位置を提供できず、そのようなベクトルは、回転角度を360°にわたって変化させることによって楕円を描く。その結果、ステムの軸方向位置が分らない限り、ステムの軸方向位置を正確に決定することはできず、さらに、このステムの角度位置を正確に決定することもできない。したがって、文献欧州特許第3210083号明細書で提案されている軸方向位置を決定するための方法は、まず不明瞭であり、詳細な説明がない。さらに、この特許文献の教示では、磁石、特に双極磁石、したがってステムの軸方向位置を効率的かつ正確に測定する手段が熟練者に提供されていない。
【先行技術文献】
【特許文献】
【0006】
欧州特許第3210083号明細書
欧州特許出願公開第3705902号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、磁化された制御ロッドまたはシャフトの既存のソリューションの上記の欠点の少なくともいくつかを克服することである。したがって、本発明の目的は、腕時計のリューズステム配置など、電子制御デバイスのシャフトの軸方向変位または軸方向位置を決定するためのソリューションを提供することである。
【課題を解決するための手段】
【0008】
本発明の第1の態様によれば、請求項1に記載されているように、電子制御デバイスのシャフトの軸方向変位または軸方向位置を、または、シャフトの軸方向変位または軸方向位置に応じた所定の機能または動作のための制御値を、決定する方法が提供される。
【0009】
本発明は、リューズステム(本発明が腕時計に適用される場合)の軸方向変位または軸方向位置を、電気接点および対応する機械部品を使用せずに、比較的高い確実性で検出できるという利点を有する。
【0010】
特定のモードでは、本発明は、シャフトの回転の検出を阻止または無視するため、シャフトの回転に関連する意図せぬ動作を回避するため、または、電子腕時計の機能の強度を調整するために、シャフトの軸方向変位または軸方向位置の検出を使用することを可能にする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
目覚し時計
17日前
個人
休憩報知タイマー
1か月前
セイコーエプソン株式会社
時計
1か月前
個人
自照式の針により認視性を高めたアナログ式時計
1か月前
セイコーエプソン株式会社
電子時計
11日前
セイコーエプソン株式会社
機械式時計
2か月前
株式会社oneA
目覚まし装置
2か月前
セイコーエプソン株式会社
電子制御式機械時計
1か月前
シチズン時計株式会社
機械式時計
1か月前
シチズン時計株式会社
機械式時計
16日前
セイコーエプソン株式会社
ムーブメント及び時計
1か月前
セイコーエプソン株式会社
電子時計
1か月前
個人
アナログ時計、時間表示方法、および、時間表示プログラム
1か月前
カシオ計算機株式会社
機器ケース及び時計
13日前
株式会社5コーポレーション
勉強時間測定装置及び勉強時間測定方法
2か月前
住友ベークライト株式会社
計時装置、計時方法および検査装置
1か月前
モントレー ブレゲ・エス アー
プレート上のディスプレイモジュールの配置
1か月前
モントレー ブレゲ・エス アー
表示機構のための調整システム
1か月前
セイコーエプソン株式会社
機械式時計及び機械式時計の組み立て方法
16日前
カシオ計算機株式会社
カバー構造体、時計、およびカバー構造体の製造方法
1か月前
東邦瓦斯株式会社
ウェアラブル機器用防熱カバー
10日前
モントレー ブレゲ・エス アー
質量体を含む時計調速機構の複合部品
1か月前
モントレー ブレゲ・エス アー
時計ムーブメントのための摩擦システム
1か月前
リズム株式会社
からくり時計の装着構造体及びからくり時計
1か月前
ニヴァロックス-ファー ソシエテ アノニム
ヒゲゼンマイを製造する方法
1か月前
モントレー ブレゲ・エス アー
時計ムーブメントのための針設定のデバイス
1か月前
モントレー ブレゲ・エス アー
時計機構のための位置設定及びマーキング装置
1か月前
ロレックス・ソシエテ・アノニム
時計制御装置
4日前
プレシフレックス エスアー
天体表示
1か月前
カシオ計算機株式会社
ウェアラブル機器、通知方法及びプログラム
20日前
ロレックス・ソシエテ・アノニム
時計駆動装置
1か月前
カシオ計算機株式会社
電子時計、電子時計の制御方法及びプログラム
10日前
カシオ計算機株式会社
電子機器、電子機器の制御方法及びプログラム
1か月前
モントレー ブレゲ・エス アー
腕時計ムーブメントに連結する機構を含む表示装置
2か月前
ロレックス・ソシエテ・アノニム
時計の調速システム
2か月前
ハリー・ウィンストン・エス アー
携行型時計ケースの押しボタンをロックするためのロックデバイス
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ