TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025109004
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024002638
出願日
2024-01-11
発明の名称
カメラのキャリブレーション方法及びキャリブレーション装置
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G06T
7/80 20170101AFI20250716BHJP(計算;計数)
要約
【課題】カメラのキャリブレーションの精度を向上させることができるカメラのキャリブレーション方法及びキャリブレーション装置を提供する。
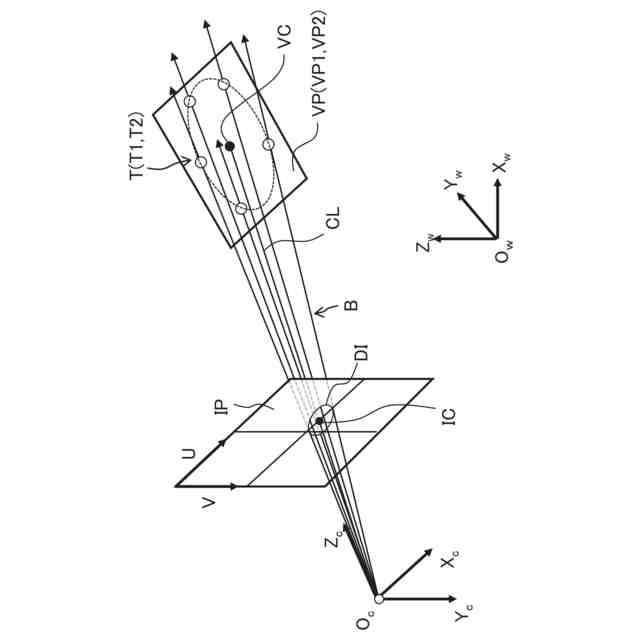
【解決手段】複数のドットが周期的に配置されたドットパターンをカメラで撮影した複数のキャリブレーション画像を取得する画像取得ステップと、ドットの配置に関する情報を含むパターン情報を設定するパターン情報設定ステップと、キャリブレーション画像からドットの位置を示す特徴点を検出する特徴点検出ステップと、特徴点とパターン情報とに基づいて、カメラのパラメータを算出するパラメータ算出ステップと、を含み、特徴点検出ステップは、3次元空間内に設定された仮想平面VPに対してキャリブレーション画像の画像平面IP上のドット像DIの輪郭を投影した投影像に基づいて、特徴点としてドット重心位置を検出する。
【選択図】図5
特許請求の範囲
【請求項1】
複数のドットが周期的に配置されたドットパターンをカメラで撮影した複数のキャリブレーション画像を取得する画像取得ステップと、
前記ドットの配置に関する情報を含むパターン情報を設定するパターン情報設定ステップと、
前記キャリブレーション画像から前記ドットの位置を示す特徴点を検出する特徴点検出ステップと、
前記特徴点と前記パターン情報とに基づいて、前記カメラのパラメータを算出するパラメータ算出ステップと、
を含み、
前記特徴点検出ステップは、3次元空間内に設定された仮想平面に対して前記キャリブレーション画像の画像平面上の前記ドットの輪郭を投影した投影像に基づいて、前記特徴点として前記ドットの重心の位置を検出する、
カメラのキャリブレーション方法。
続きを表示(約 1,300 文字)
【請求項2】
前記特徴点検出ステップは、前記投影像に円がフィッティングするように最適化された前記仮想平面を求め、求めた前記仮想平面に投影した前記投影像に基づいて、前記特徴点として前記ドットの重心の位置を検出する、
請求項1に記載のカメラのキャリブレーション方法。
【請求項3】
前記特徴点検出ステップは、前記画像平面上の前記ドットの輪郭を示す複数の輪郭点を前記仮想平面に投影した複数の投影点からなる点群を近似処理して得られる円を近似円とした場合、前記点群に対する前記近似円のフィッティング誤差を示す評価値が最小又は閾値以下となるように最適化された前記仮想平面を求め、前記最適化された前記仮想平面上における前記近似円の中心を前記画像平面に投影した点の位置を前記ドットの重心の位置とする、
請求項1に記載のカメラのキャリブレーション方法。
【請求項4】
前記特徴点検出ステップは、前記点群に対する前記近似円のフィッティング誤差を示す評価値に基づいて、3次元空間内において姿勢が異なる複数の前記仮想平面の中から前記最適化された前記仮想平面を探索する探索ステップを含む、
請求項3に記載のカメラのキャリブレーション方法。
【請求項5】
前記探索ステップは、前記画像平面上における前記ドットの長軸方向に平行な軸周りに前記仮想平面を回転させることにより前記仮想平面を複数の姿勢に変更しつつ、前記姿勢ごとに前記評価値を算出し、前記姿勢ごとに算出された前記評価値に基づき、前記最適化された前記仮想平面を決定する、
請求項4に記載のカメラのキャリブレーション方法。
【請求項6】
前記特徴点検出ステップは、
前記画像平面から前記ドットの前記複数の輪郭点を抽出する輪郭点抽出ステップと、
前記カメラの光学中心を始点とし、前記画像平面上の前記ドットの前記複数の輪郭点をそれぞれ通る複数の半直線からなる半直線群を生成する半直線群生成ステップと、
前記半直線群と前記仮想平面との交点群に基づき前記近似円を算出する近似円算出ステップと、
を含む、請求項4に記載のカメラのキャリブレーション方法。
【請求項7】
複数のドットが周期的に配置されたドットパターンをカメラで撮影した複数のキャリブレーション画像を取得する画像取得部と、
前記ドットパターンにおける前記ドットの配置に関する情報を含むパターン情報を設定するパターン情報設定部と、
前記キャリブレーション画像から特徴点を検出する特徴点検出部と、
前記特徴点と前記パターン情報とに基づいて、前記カメラのパラメータを算出するパラメータ算出部と、
を備え、
前記特徴点検出部は、3次元空間内に設定された仮想平面に対して前記キャリブレーション画像の画像平面上の前記ドットの輪郭を投影した投影像に基づいて、前記特徴点として前記ドットの重心の位置を検出する、
カメラのキャリブレーション装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カメラのキャリブレーション方法及びキャリブレーション装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
一般に、物体検出のためにカメラを用いる場合には、カメラのキャリブレーション(校正)が行われる。カメラのキャリブレーションでは、2次元的に整列した複数の特徴点を有する平面状のキャリブレーションパターンを用意し、キャリブレーションパターンを複数方向からカメラで撮影する。そして、カメラで撮影された複数の画像から特徴点を検出し、検出した特徴点の座標を用いて、カメラのパラメータを推定する。カメラのパラメータには、カメラの内部パラメータ(焦点距離、光学中心)又は歪みパラメータ(歪み係数)が含まれる。
【0003】
例えば、特許文献1には、キャリブレーションパターンとして、複数のドット(黒丸)が格子状に配列されたドットパターンを用いてカメラのキャリブレーションを行う方法が開示されている。この方法では、カメラで撮影した画像(キャリブレーション画像)上でドットパターンに含まれるドットの重心の位置を特徴点として検出することにより、カメラのパラメータを求めている。
【0004】
また、特許文献1には、ドットパターン以外の他のキャリブレーションパターンとして、グリッドパターン及びチェッカーパターンも開示されている。これらのキャリブレーションパターンが用いられる場合には、直線と直線の交点(コーナー)が特徴点として検出される。
【先行技術文献】
【特許文献】
【0005】
特開2022-30807号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
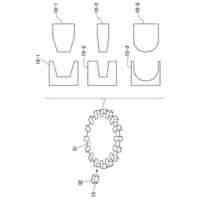
特許文献1に開示されたキャリブレーションパターンのうち、例えば、図9のIXAに示すグリッドパターン又は図9のIXBに示すチェッカーパターンが用いられる場合、キャリブレーション画像上で各パターンの直線と直線の交点(コーナー)H1又はH2を特徴点として検出(すなわち、エッジ検出)する。このようなエッジ検出では、エッジの輝度勾配(微分値)を使用する必要がある。そのため、交点H1又はH2の検出位置(座標)は輝度ノイズの影響を受けやすく、ドットパターンと比較して特徴点の検出精度がよくないという問題がある。
【0007】
一方、図9のIXCに示すドットパターンが用いられる場合、キャリブレーション画像上でドットパターンのドットDの重心位置を特徴点として検出するため、グリッドパターン又はチェッカーパターンと比較して輝度ノイズの影響は受けにくいが、以下に述べるような課題がある。
【0008】
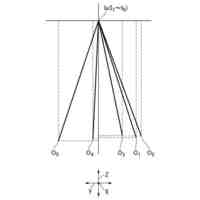
図10及び図11は、カメラCAMによりドットパターン上のドットDを撮影した例を示している。図10において、O
c
はカメラCAMを基準とするカメラ座標系の原点(カメラ原点)を示している。また、図10及び図11において、U軸及びV軸は、カメラCAMの画像平面M上で定義される画像座標系(2次元直交座標系)を構成する座標軸である。
【0009】
通常のレンズ(非テレセントリック光学系)を有するカメラを用いて撮影された画像では、カメラからの距離によって倍率が変化する特性がある。すなわち、カメラからの距離が長い程、得られる画像が小さく、その距離が短い程、得られる画像は大きくなる。そのため、図10に示すように、ドットパターン上のドットDを斜め方向からカメラCAMにより撮影した場合、図11に示すように、カメラCAMにより撮影された画像上のドットDの像(以下、「ドット像」という。)DIは、カメラCAMとの位置関係に応じて特定の方向に歪んだオーバル形状となる。すなわち、カメラCAMにより撮影された画像上のドット像DIでは、手前側(カメラCAMからの距離が短い側、+V側)の部分が奥側(カメラCAMからの距離が長い側、-V側)の部分に比べて相対的に小さくなる形状となる。そのため、画像上のドット像DIの形状から2次元的にドット重心位置を求めようとした場合、非テレセントリック光学系の影響により、本来の位置からずれた位置にドット重心位置が求められてしまう場合がある。
【0010】
図12及び図13は、ドットパターン(ドットD)に対するカメラCAMの傾きがドット重心位置の検出結果に与える影響を説明するための図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
プローバ
1日前
株式会社東京精密
プローバ
11日前
株式会社東京精密
加工方法
2日前
株式会社東京精密
加工装置
2日前
株式会社東京精密
加工装置
2日前
株式会社東京精密
プローバ
2日前
株式会社東京精密
プローバ
7日前
株式会社東京精密
加工装置
7日前
株式会社東京精密
研削装置
今日
株式会社東京精密
加工装置
今日
株式会社東京精密
プローバ
8日前
株式会社東京精密
加工装置
21日前
株式会社東京精密
加工装置
21日前
株式会社東京精密
搬送装置
今日
株式会社東京精密
プローバ
21日前
株式会社東京精密
亀裂測定器
今日
株式会社東京精密
亀裂測定器
今日
株式会社東京精密
電池検査装置
11日前
株式会社東京精密
レーザ加工装置
今日
株式会社東京精密
半導体製造装置
今日
株式会社東京精密
レーザ加工装置
今日
株式会社東京精密
ダイシング装置
今日
株式会社東京精密
レーザ加工装置
今日
株式会社東京精密
テープ貼付装置
今日
株式会社東京精密
ハブレスブレード
2日前
株式会社東京精密
スラリー供給装置
22日前
株式会社東京精密
収容ボックスシステム
1日前
株式会社東京精密
吸着装置及び研削装置
今日
株式会社東京精密
加工装置及び加工方法
今日
株式会社東京精密
ウェーハの面取り装置
今日
株式会社東京精密
校正方法及び校正装置
7日前
株式会社東京精密
ウェーハの面取り装置
今日
株式会社東京精密
ケーブルのガイド方法
今日
株式会社東京精密
ウェーハセンシング装置
2日前
株式会社東京精密
CMP装置及び研磨方法
1日前
株式会社東京精密
加工方法、及び、加工装置
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ