TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095227
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211090
出願日
2023-12-14
発明の名称
制御システム、システム設計ツール、制御方法、および、コンピュータプログラム
出願人
株式会社豊田中央研究所
,
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G05B
13/02 20060101AFI20250619BHJP(制御;調整)
要約
【課題】 制御対象を制御する制御システムにおいて、モデル誤差や制約条件が存在する条件において、制御対象の出力の安定性を保証する技術を提供する。
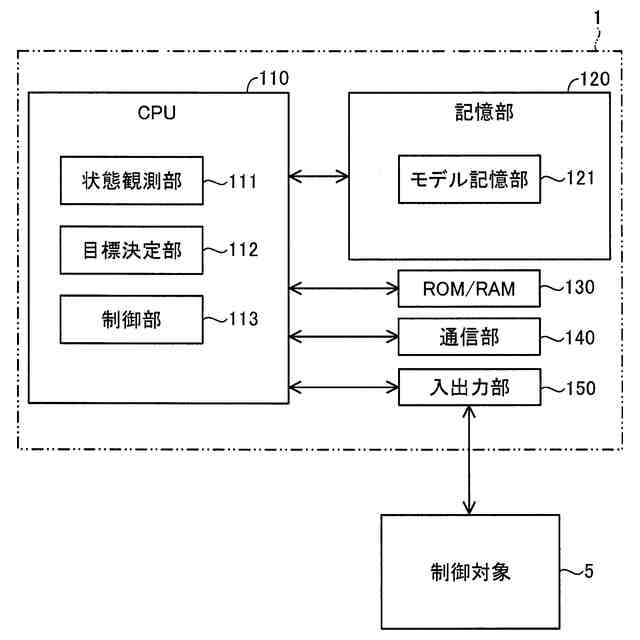
【解決手段】 制御システムは、式(3)および式(4)によって表されるモデル誤差を含む制御対象の状態を観測し、式(5)によって表される外乱を推定する状態観測器と、入力目標に関する線形不等式制約と、外乱の推定値および外部信号が考慮された最適化問題と、を用いて、入力目標を修正し、修正入力目標を決定する、式(6)および式(7)によって表される、目標決定器と、制御対象を制御する制御器であって、目標決定器によって決定される修正入力目標を用いて、制御対象を制御する、式(9)によって表される、制御器と、を備え、式(3)および式(5)に含まれるα、式(6)に含まれるβ、および、式(9)に含まれるγは、各時刻において決定される。
【選択図】 図1
特許請求の範囲
【請求項1】
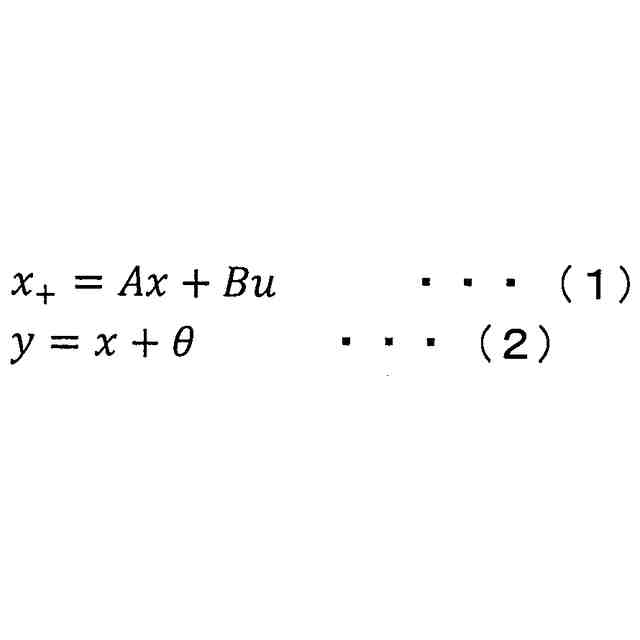
出力に未知の外乱が付加される線形系であって、式(1)および式(2)によって表される線形系を制御対象とする制御システムであって、
式(3)および式(4)によって表されるモデル誤差を含む前記制御対象の状態を観測し、式(5)によって表される前記外乱を推定する状態観測器と、
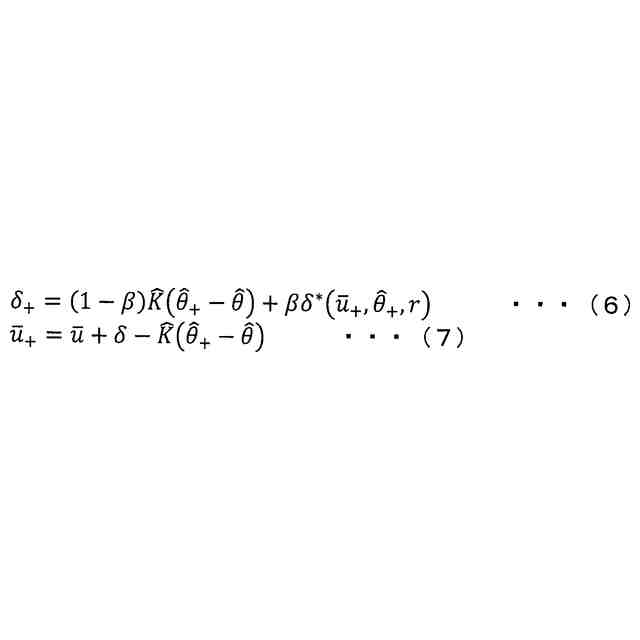
入力目標に関する線形不等式制約と、前記状態観測器で推定された前記外乱の推定値および外部信号が考慮された最適化問題と、を用いて、前記入力目標を修正し、修正入力目標を決定する、式(6)および式(7)によって表される、目標決定器と、
前記制御対象を制御する制御器であって、前記目標決定器によって決定される前記修正入力目標を用いて、前記制御対象を制御する、式(9)によって表される、制御器と、を備え、
式(3)および式(5)に含まれるα、式(6)に含まれるβ、および、式(9)に含まれるγは、各時刻において決定される、
制御システム。
TIFF
2025095227000071.tif
15
170
ただし、xは、n次元の状態であり、uは、n次元の入力であり、yは、n次元の出力であり、θは、n次元の外乱であり、A,Bは、n×n行列であり、
+
(プラス)は、次の時刻の値を表し、x,θ,A,Bの真値は、不明であり、u,yの値は、判明しており、
TIFF
2025095227000072.tif
23
170
ただし、^(ハット)は、推定値を表し、αは、非負のスカラー値であり、L
x
,L
θ
は、n×n行列のオブザーバゲインであり、A^(ハット)とB^(ハット)とのそれぞれは、モデル誤差θを含みうる、A,Bを再現した行列であり、
TIFF
2025095227000073.tif
19
170
ただし、K^(ハット)は、式(8)で表され、
TIFF
2025095227000074.tif
13
170
βは、非負のスカラー値であり、rは、外部信号であり、δ
*
は、入力目標u ̄(バー)の更新量を決定する関数であり、
TIFF
2025095227000075.tif
11
170
ただし、γは、スカラー値をとり、u
*~
(チルダ)は、任意のn次元ベクトル値である。
続きを表示(約 3,900 文字)
【請求項2】
請求項1に記載の制御システムであって、
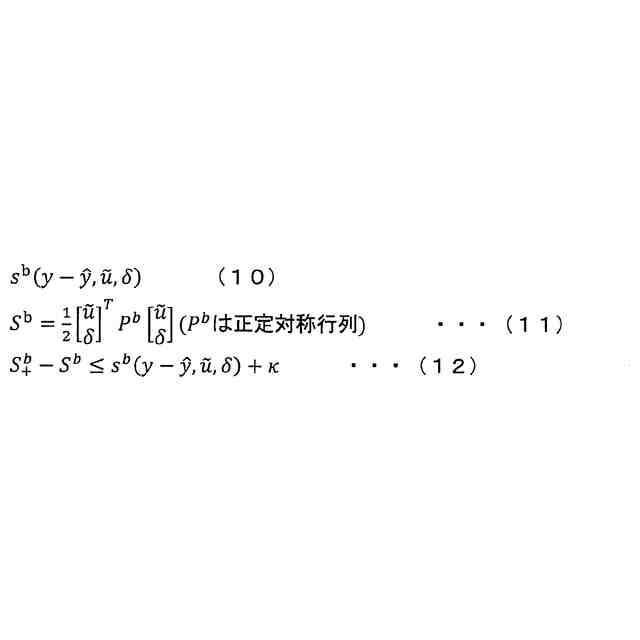
α、β、および、γは、式(10)と式(11)とを用いた不等式として、式(12)の条件が課される、
制御システム。
TIFF
2025095227000076.tif
29
170
ただし、κは、時間が経過することで0に収束する正のスカラー値である。
【請求項3】
請求項1または請求項2に記載の制御システムであって、
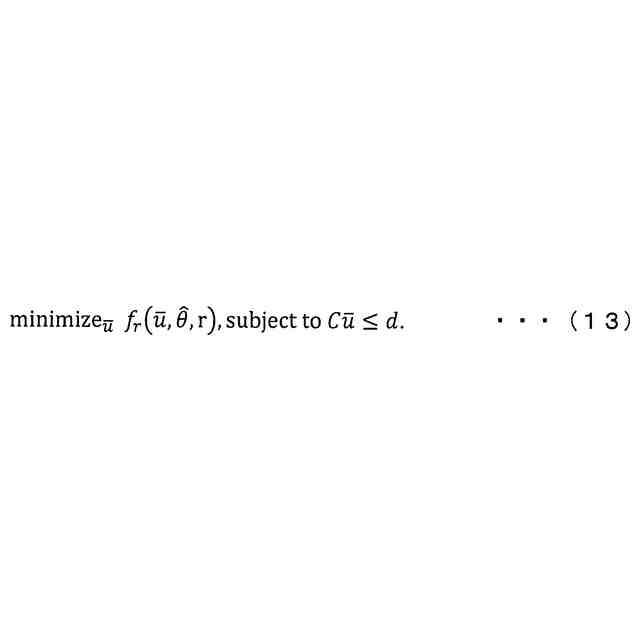
前記目標決定器は、式(13)で表される最適化問題を用いて、前記修正入力目標を決定し、
式(6)の要件を満たすδ
*
は、式(15)および式(16)である、
制御システム。
TIFF
2025095227000077.tif
12
170
ただし、式(13)は、式(14)に示す入力目標に関する線形不等式制約の下である目的関数f
r
を最小化する最適化問題であり、
TIFF
2025095227000078.tif
12
170
Cは、m×n行列であり、dは、n次元ベクトルであり、
TIFF
2025095227000079.tif
26
170
【請求項4】
出力に未知の外乱が付加される線形系であって、式(1)および式(2)によって表される線形系を制御対象とする制御方法であって、
式(3)および式(4)によって表されるモデル誤差を含む前記制御対象の状態を観測し、式(5)によって表される前記外乱を推定する状態観測工程と、
入力目標に関する線形不等式制約と、前記状態観測工程において推定された前記外乱の推定値および外部信号が考慮された最適化問題と、を用いて、前記入力目標を修正し、修正入力目標を決定する、式(6)および式(7)によって表される、目標決定工程と、
前記制御対象を制御する制御器であって、前記目標決定工程において決定される前記修正入力目標を用いて、前記制御対象を制御する、式(9)によって表される、制御工程と、を備え、
式(3)および式(5)に含まれるα、式(6)に含まれるβ、および、式(9)に含まれるγは、各時刻において決定される、
制御方法。
TIFF
2025095227000080.tif
16
170
ただし、xは、n次元の状態であり、uは、n次元の入力であり、yは、n次元の出力であり、θは、n次元の外乱であり、A,Bは、n×n行列であり、
+
(プラス)は、次の時刻の値を表し、x,θ,A,Bの真値は、不明であり、u,yの値は、判明しており、
TIFF
2025095227000081.tif
23
170
ただし、^(ハット)は、推定値を表し、αは、非負のスカラー値であり、L
x
,L
θ
は、n×n行列のオブザーバゲインであり、A^(ハット)とB^(ハット)とのそれぞれは、モデル誤差θを含みうる、A,Bを再現した行列であり、
TIFF
2025095227000082.tif
18
170
ただし、K^(ハット)は、式(8)で表され、
TIFF
2025095227000083.tif
10
170
βは、非負のスカラー値であり、rは、外部信号であり、δ
*
は、入力目標u ̄(バー)の更新量を決定する関数であり、
TIFF
2025095227000084.tif
11
170
ただし、γは、スカラー値をとり、u
*~
(チルダ)は、任意のn次元ベクトル値である。
【請求項5】
出力に未知の外乱が付加される線形系であって、式(1)および式(2)によって表される線形系を制御対象とする制御システムを設計するためのシステム設計ツールであって、
式(3)および式(4)によって表されるモデル誤差を含む前記制御対象の状態を観測し、式(5)によって表される前記外乱を推定する状態観測機能と、
入力目標に関する線形不等式制約と、前記状態観測機能によって推定された前記外乱の推定値および外部信号が考慮された最適化問題と、を用いて、前記入力目標を修正し、修正入力目標を決定する、式(6)および式(7)によって表される、目標決定機能と、
前記制御対象を制御する制御器であって、前記目標決定機能によって決定される前記修正入力目標を用いて、前記制御対象を制御する、式(9)によって表される、制御機能と、を設計する設計部を備え、
前記設計部は、式(3)および式(5)に含まれるα、式(6)に含まれるβ、および、式(9)に含まれるγは、各時刻において決定されるように、設計する、
システム設計ツール。
TIFF
2025095227000085.tif
16
170
ただし、xは、n次元の状態であり、uは、n次元の入力であり、yは、n次元の出力であり、θは、n次元の外乱であり、A,Bは、n×n行列であり、
+
(プラス)は、次の時刻の値を表し、x,θ,A,Bの真値は、不明であり、u,yの値は、判明しており、
TIFF
2025095227000086.tif
21
170
ただし、^(ハット)は、推定値を表し、αは、非負のスカラー値であり、L
x
,L
θ
は、n×n行列のオブザーバゲインであり、A^(ハット)とB^(ハット)とのそれぞれは、モデル誤差θを含みうる、A,Bを再現した行列であり、
TIFF
2025095227000087.tif
16
170
ただし、K^(ハット)は、式(8)で表され、
TIFF
2025095227000088.tif
12
170
βは、非負のスカラー値であり、rは、外部信号であり、δ
*
は、入力目標u ̄(バー)の更新量を決定する関数であり、
TIFF
2025095227000089.tif
10
170
ただし、γは、スカラー値をとり、u
*~
(チルダ)は、任意のn次元ベクトル値である。
【請求項6】
出力に未知の外乱が付加される線形系であって、式(1)および式(2)によって表される線形系である制御対象をコンピュータに制御させるコンピュータプログラムであって、
式(3)および式(4)によって表されるモデル誤差を含む前記制御対象の状態を観測し、式(5)によって表される前記外乱を推定する状態観測機能と、
入力目標に関する線形不等式制約と、前記状態観測機能によって推定された前記外乱の推定値および外部信号が考慮された最適化問題と、を用いて、前記入力目標を修正し、修正入力目標を決定する、式(6)および式(7)によって表される、目標決定機能と、
前記制御対象を制御する制御機能であって、前記目標決定機能によって決定される前記修正入力目標を用いて、前記制御対象を制御する、式(9)によって表される、制御機能と、を前記コンピュータに実行させ、
式(3)および式(5)に含まれるα、式(6)に含まれるβ、および、式(9)に含まれるγは、各時刻において決定される、
コンピュータプログラム。
TIFF
2025095227000090.tif
15
170
ただし、xは、n次元の状態であり、uは、n次元の入力であり、yは、n次元の出力であり、θは、n次元の外乱であり、A,Bは、n×n行列であり、
+
(プラス)は、次の時刻の値を表し、x,θ,A,Bの真値は、不明であり、u,yの値は、判明しており、
TIFF
2025095227000091.tif
23
170
ただし、^(ハット)は、推定値を表し、αは、非負のスカラー値であり、L
x
,L
θ
は、n×n行列のオブザーバゲインであり、A^(ハット)とB^(ハット)とのそれぞれは、モデル誤差θを含みうる、A,Bを再現した行列であり、
TIFF
2025095227000092.tif
18
170
ただし、K^(ハット)は、式(8)で表され、
TIFF
2025095227000093.tif
10
170
βは、非負のスカラー値であり、rは、外部信号であり、δ
*
は、入力目標の更新量を決定する関数であり、
TIFF
2025095227000094.tif
10
170
ただし、γは、スカラー値をとり、u
*~
(チルダ)は、任意のn次元ベクトル値である。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システム、システム設計ツール、制御方法、および、コンピュータプログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来から、制御対象への入力と入力された制御対象からの出力との関係を表すモデルを用いて、制御対象を制御する制御システムが知られている(例えば、特許文献1,2、および、非特許文献1~3)。
【先行技術文献】
【特許文献】
【0003】
特許第7310179号公報
特許第6513015号公報
【非特許文献】
【0004】
Urban Maeder, Francesco Borrelli, Manfred Morari, “Linear offset-free Model Predictive Control”, Automatica, 2009, Volume 45, Issue 10, October 2009, Pages 2214-2222
Pablo Krupa, Nilay Saraf, Daniel Limon, Alberto Bemporad, “ PLC implementation of a real-time embedded MPC algorithm based on linear input/output models”, IFACPapersOnLine,2020, Volume 53, Issue 2, 2020, Pages 6987-6992
V. Adetola, M. Guay, “Integration of real-time optimization and model predictive control”, Journal of Process Control, 2010, Volume 20, Issue 2, February 2010, Pages 125-133
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したような先行技術によっても、制御対象を制御する制御システムにおいて、モデル誤差や制約条件が存在する条件下において、制御対象の出力の安定性を保証する技術については、なお改善の余地があった。
【0006】
本発明は、上述した課題を解決するためになされたものであり、制御対象を制御する制御システムにおいて、モデル誤差や制約条件が存在する条件下において、制御対象の出力の安定性を保証する技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上述の課題を解決するためになされたものであり、以下の形態として実現できる。
【0008】
(1)本発明の一形態によれば、出力に未知の外乱が付加される線形系であって、式(1)および式(2)によって表される線形系を制御対象とする制御システムが提供される。この制御システムは、式(3)および式(4)によって表されるモデル誤差を含む前記制御対象の状態を観測し、式(5)によって表される前記外乱を推定する状態観測器と、入力目標に関する線形不等式制約と、前記状態観測器で推定された前記外乱の推定値および外部信号が考慮された最適化問題と、を用いて、前記入力目標を修正し、修正入力目標を決定する、式(6)および式(7)によって表される、目標決定器と、前記制御対象を制御する制御器であって、前記目標決定器によって決定される前記修正入力目標を用いて、前記制御対象を制御する、式(9)によって表される、制御器と、を備え、式(3)および式(5)に含まれるα、式(6)に含まれるβ、および、式(9)に含まれるγは、各時刻において決定される。
TIFF
2025095227000002.tif
17
170
ただし、xは、n次元の状態であり、uは、n次元の入力であり、yは、n次元の出力であり、θは、n次元の外乱であり、A,Bは、n×n行列であり、
+
(プラス)は、次の時刻の値を表し、x,θ,A,Bの真値は、不明であり、u,yの値は、判明しており、
TIFF
2025095227000003.tif
23
170
ただし、^(ハット)は、推定値を表し、αは、非負のスカラー値であり、L
x
,L
θ
は、n×n行列のオブザーバゲインであり、A^(ハット)とB^(ハット)とのそれぞれは、モデル誤差θを含みうる、A,Bを再現した行列であり、
TIFF
2025095227000004.tif
13
170
ただし、K^(ハット)は、式(8)で表され、
TIFF
2025095227000005.tif
11
170
βは、非負のスカラー値であり、rは、外部信号であり、δ
*
は、入力目標u ̄(バー)の更新量を決定する関数であり、
TIFF
2025095227000006.tif
9
170
ただし、γは、スカラー値をとり、u
*~
(チルダ)は、任意のn次元ベクトル値である。
【0009】
この構成によれば、状態観測器を用いて推定された、モデルと制御対象との間のモデル誤差と入力の制約とが考慮された達成可能な範囲内において、入力目標を外部信号rに応じた最適な目標に修正し、修正入力目標を決定する目標決定器を備えている。例えば、外部信号rが出力目標であるとき、目標決定器は、定常状態において、出力目標に最も近い出力が得られるような修正入力目標を、制約を満たす範囲で決定する。制御器は、目標決定器によって決定される修正入力目標を用いて、制御対象を制御する。このとき、式(3)および式(5)に含まれるα、式(6)に含まれるβ、および、式(9)に含まれるγを、各時刻において適応的に決定する。これにより、モデル誤差や制約条件が存在する条件においても、制御対象の出力の安定性を保証することができる。
【0010】
(2)上記形態の制御システムにおいて、α、β、および、γは、式(10)と式(11)とを用いた不等式として、式(12)の条件が課されてもよい。
TIFF
2025095227000007.tif
25
170
ただし、κは、時間が経過することで0に収束する正のスカラー値である。この構成によれば、式(12)の条件を満たすスカラー値α,β,γは、適切な前提とS
b
の設定のもとで常に存在するようにできる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
14日前
エイブリック株式会社
基準電圧回路
2か月前
株式会社ダイヘン
移動体
19日前
株式会社クボタ
作業車
3か月前
株式会社ダイフク
搬送車
3か月前
ローム株式会社
半導体集積回路
29日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
14日前
エイブリック株式会社
ボルテージレギュレータ
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社オプトン
制御プログラム生成装置
12日前
トヨタ自動車株式会社
工作機械の制御装置
3か月前
トヨタ自動車株式会社
工作機械の制御装置
3か月前
株式会社鷺宮製作所
制御装置
13日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社ダイフク
物品搬送設備
28日前
株式会社ダイフク
物品搬送設備
12日前
株式会社やまびこ
走行制御装置
2か月前
株式会社ダイフク
物品搬送設備
5日前
株式会社ダイヘン
負荷時タップ切換器
19日前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
12日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
25日前
株式会社タブチ
減圧弁
2か月前
WHILL株式会社
電動モビリティ
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
12日前
株式会社計数技研
移動体、及びプログラム
1か月前
オムロン株式会社
安全装置
12日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイフク
飛行体制御システム
1日前
株式会社ダイヘン
搬送車
2か月前
日本信号株式会社
自走式装置
2か月前
ローム株式会社
半導体装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ