TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094921
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2024216500
出願日
2024-12-11
発明の名称
スタッカーの制御方法、装置、立体倉庫自動化システム、電子デバイス、記憶媒体及びプログラム
出願人
チョーチアン ヘンイー ペトロケミカル カンパニー,リミテッド
,
タイツァン イーフェン ケミカル ファイバー カンパニー リミテッド
代理人
弁理士法人太陽国際特許事務所
主分類
B65G
1/04 20060101AFI20250618BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】スタッカーの制御方法、装置、立体倉庫自動化システム、電子デバイス、記憶媒体及びプログラムを提供し、化学繊維生産のインテリジェント化技術分野に関する。
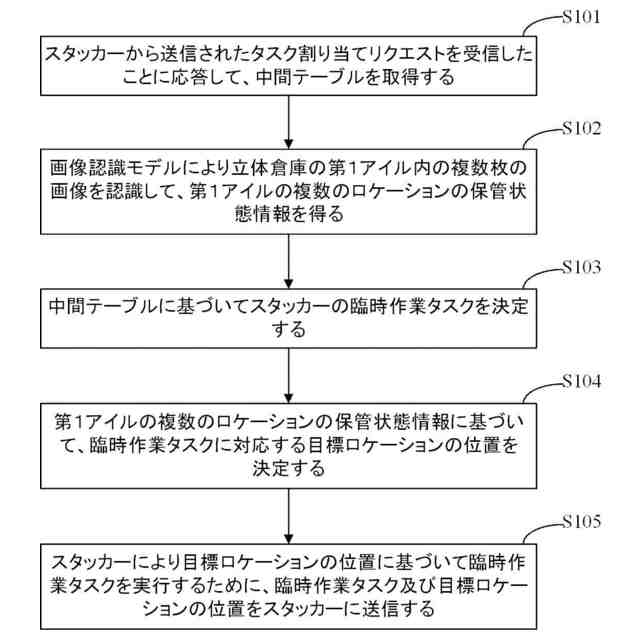
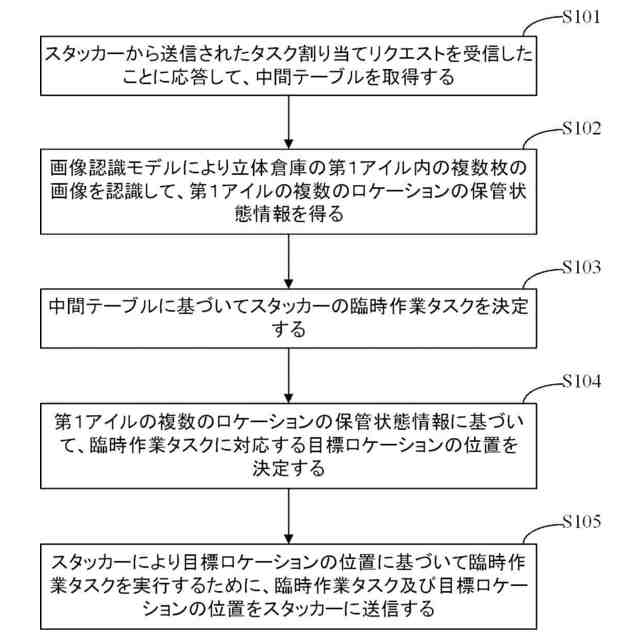
【解決手段】スタッカーから送信されたタスク割り当てリクエストを受信したことに応答して、中間テーブルを取得し、画像認識モデルにより立体倉庫の第1アイル内の複数枚の画像を認識して、前記第1アイルの複数のロケーションの保管状態情報を得、前記中間テーブルに基づいて前記スタッカーの臨時作業タスクを決定し、前記第1アイルの前記複数のロケーションの前記保管状態情報に基づいて、前記臨時作業タスクに対応する目標ロケーションの位置を決定し、前記スタッカーにより前記目標ロケーションの位置に基づいて前記臨時作業タスクを実行するために、前記臨時作業タスク及び前記目標ロケーションの位置を前記スタッカーに送信する。
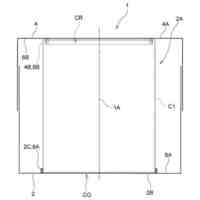
【選択図】図1
特許請求の範囲
【請求項1】
画像認識システムに適用されるスタッカーの制御方法であって、
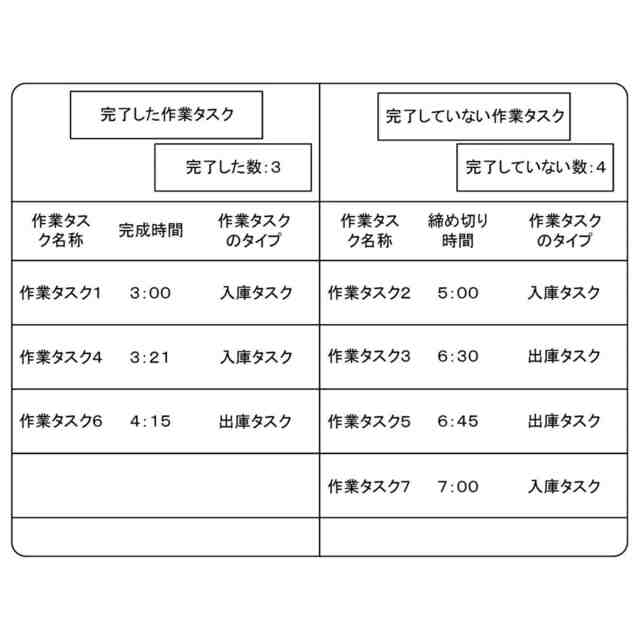
スタッカーから送信されたタスク割り当てリクエストを受信したことに応答して、中間テーブルを取得することであって、前記中間テーブルには少なくとも倉庫管理システムの完了していない作業タスクが記録されており、前記タスク割り当てリクエストは倉庫管理システムとの通信が中断した場合にスタッカーが送信したものである、ことと、
画像認識モデルにより立体倉庫の第1アイル内の複数枚の画像を認識して、前記第1アイルの複数のロケーションの保管状態情報を得ることと、
前記中間テーブルに基づいて前記スタッカーの臨時作業タスクを決定することと、
前記第1アイルの前記複数のロケーションの前記保管状態情報に基づいて、前記臨時作業タスクに対応する目標ロケーションの位置を決定することと、
前記スタッカーにより前記目標ロケーションの位置に基づいて前記臨時作業タスクを実行するために、前記臨時作業タスク及び前記目標ロケーションの位置を前記スタッカーに送信することと、を含む、
スタッカーの制御方法。
続きを表示(約 3,000 文字)
【請求項2】
前記スタッカーの制御方法であって、
前記スタッカーから送信された前記臨時作業タスクの実行状況を受信することと、
前記臨時作業タスクの実行状況に基づいて前記中間テーブルを更新することと、をさらに含む、
請求項1に記載のスタッカーの制御方法。
【請求項3】
前記スタッカーの制御方法は、
前記スタッカーから送信されたタスク終了リクエストを受信したことに応答して、前記倉庫管理システムに更新後の前記中間テーブルを送信し、前記倉庫管理システムが更新後の前記中間テーブル及び前記倉庫管理システム自身が記憶した中間テーブルに基づいて集約処理を行い、集約後の中間テーブルに基づいて正常作業タスクを決定することをさらに含み、前記タスク終了リクエストは、前記スタッカーと前記倉庫管理システムとの通信が復旧された後に送信されたものである、
請求項2に記載のスタッカーの制御方法。
【請求項4】
前記タスク割り当てリクエストを受信した後、前記スタッカーの制御方法は、
撮影すべきロケーション及び撮影角度を指示するための画像撮影指令を前記スタッカーに送信し、前記スタッカーが前記画像撮影指令に基づいて前記撮影角度で前記撮影すべきロケーションの画像を撮影することであって、前記撮影すべきロケーションは前記第1アイルに含まれるすべてのロケーションにおける一部のロケーションである、ことと、
前記スタッカーから送信された前記第1アイル内の前記撮影すべきロケーションの画像を受信することと、をさらに含み、前記複数枚の画像は前記撮影すべきロケーションの画像を含む、
請求項1に記載のスタッカーの制御方法。
【請求項5】
前記スタッカーの制御方法は、
前記中間テーブルに基づいてプリセット期間における前記第1アイルの少なくとも一部のロケーションの保管状態を決定することであって、前記プリセット期間は、前記中間テーブルの生成時間を起点とし、予め設定された閾値の時間長を有する、ことと、
前記画像認識モデルにより得られた保管状態情報と前記中間テーブルに基づいて決定された保管状態情報とを比較することと、
前記画像認識モデルによって得られた保管状態情報と前記中間テーブルに基づいて決定された保管状態情報とが一致しない第1タイプのロケーションを記録することであって、前記第1タイプのロケーションは保管状態を確認すべきロケーションである、ことと、をさらに含む、
請求項1に記載のスタッカーの制御方法。
【請求項6】
前記第1アイルの前記複数のロケーションの前記保管状態情報に基づいて、前記臨時作業タスクに対応する目標ロケーションの位置を決定することは、
前記臨時作業タスクが臨時入庫タスクである場合、前記画像認識モデルにより得られた保管状態情報と中間テーブルに基づいて決定された保管状態情報とが一致する少なくとも1つの第2タイプのロケーションの中から、前記臨時入庫タスクのために前記目標ロケーションを選択し、前記目標ロケーションの位置を決定することであって、前記第2タイプのロケーションは、貨物が格納されていないロケーションである、ことを含む、
請求項5に記載のスタッカーの制御方法。
【請求項7】
前記第1アイルの前記複数のロケーションの前記保管状態情報に基づいて、前記臨時作業タスクに対応する目標ロケーションの位置を決定することは、
前記臨時作業タスクが臨時出庫タスクである場合、前記画像認識モデルによって得られた保管状態情報と前記中間テーブルに基づいて決定された保管状態情報とが一致する少なくとも1つの第3タイプのロケーションの中から、前記臨時出庫タスクが対象とする貨物ロット番号と合わせて、前記臨時出庫タスクのために前記目標ロケーションを選択し、前記目標ロケーションの位置を決定することであって、前記第3タイプのロケーションは、貨物が格納されているロケーションである、ことを含む、
請求項5に記載のスタッカーの制御方法。
【請求項8】
前記画像認識モデルにより立体倉庫の第1アイル内の複数枚の画像を認識して、前記第1アイルの複数のロケーションの保管状態情報を得ることは、
前記複数枚の画像及び前記立体倉庫の履歴保管状態情報を前記画像認識モデルに入力し、前記画像認識モデルにより出力された前記複数のロケーションの保管状態情報を得ることであって、前記画像認識モデルは、ロケーションに貨物が格納されているか否か、及びロケーションに格納されている貨物の標識を識別することに用いられる、ことを含む、
請求項1に記載のスタッカーの制御方法。
【請求項9】
前記画像認識モデルは、
前記立体倉庫の複数のサンプルロケーションの履歴保管状態情報及び履歴画像を取得し、
前記複数のサンプルロケーションの前記履歴保管状態情報及び前記履歴画像をプリセットモデルに入力して前記複数のサンプルロケーションの保管状態予測値を得、
前記複数のサンプルロケーションの保管状態真値と前記保管状態予測値とに基づいて損失関数を構築し、
前記損失関数に基づいて前記プリセットモデルをトレーニングして前記画像認識モデルを得る、ことによってトレーニングして得られる、
請求項1に記載のスタッカーの制御方法。
【請求項10】
立体倉庫自動化システムであって、
スタッカーと通信する場合にスタッカーに正常作業タスクを送信し、計算力センターに中間テーブルを送信するための倉庫管理システムと、
前記中間テーブルを記憶するための計算力センターであって、前記中間テーブルには少なくとも前記倉庫管理システムの完了していない作業タスクが記録されている、計算力センターと、
前記倉庫管理システムから送信された前記正常作業タスクを受信したときに、前記正常作業タスクを実行するためのスタッカーであって、前記倉庫管理システムとの通信が中断した場合に、画像認識システムにタスク割り当てリクエストを送信するために、前記画像認識システムにより返送された臨時作業タスク及び目標ロケーションの位置を受信し、前記目標ロケーションの位置に基づいて前記臨時作業タスクを実行する、スタッカーと、
スタッカーから送信されたタスク割り当てリクエストを受信したことに応答して、前記計算力センターから中間テーブルを取得するための画像認識システムであって、画像認識モデルにより立体倉庫の第1アイル内の複数枚の画像を認識して、前記第1アイルの複数のロケーションの保管状態情報を得、前記中間テーブルに基づいて前記スタッカーの臨時作業タスクを決定し、前記第1アイルの前記複数のロケーションの前記保管状態情報に基づいて、前記臨時作業タスクに対応する目標ロケーションの位置を決定し、前記スタッカーに前記臨時作業タスク及び前記目標ロケーションの位置を送信する、画像認識システムと、を備える、
立体倉庫自動化システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は化学繊維生産のインテリジェント化技術分野に関し、特にスタッカーの制御方法、装置及び立体倉庫自動化システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
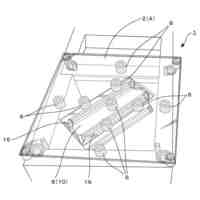
化学繊維生産分野では、立体倉庫は空間利用率が高く、自動化度合いが高いなどの利点があるため、立体倉庫は巻糸パッケージ包装の工場などに広く応用されている。
【発明の概要】
【発明が解決しようとする課題】
【0003】
スタッカーは立体倉庫の重要な設備の一つとして、その作業状態は入出庫作業効率に影響を与える。そのため、スタッカーのタスク実行効率と安全性をどのように高めるかは早急に解決すべき技術問題となっている。
【課題を解決するための手段】
【0004】
本開示は、スタッカーの制御方法、装置、立体倉庫自動化システム、電子デバイス、記憶媒体及びプログラムを提供する。
【0005】
本開示の第1態様によれば、画像認識システムに適用されるスタッカーの制御方法を提供し、該方法は、
スタッカーから送信されたタスク割り当てリクエストを受信したことに応答して、中間テーブルを取得することであって、中間テーブルには少なくとも倉庫管理システムの完了していない作業タスクが記録されており、タスク割り当てリクエストは倉庫管理システムとの通信が中断した場合にスタッカーが送信したものである、ことと、
画像認識モデルにより立体倉庫の第1アイル内の複数枚の画像を認識して、第1アイルの複数のロケーションの保管状態情報を得ることと、
中間テーブルに基づいてスタッカーの臨時作業タスクを決定することと、
第1アイルの複数のロケーションの保管状態情報に基づいて、臨時作業タスクに対応する目標ロケーションの位置を決定することと、
スタッカーにより目標ロケーションの位置に基づいて臨時作業タスクを実行するために、臨時作業タスク及び目標ロケーションの位置をスタッカーに送信することと、を含む。
【0006】
本開示の第2態様によれば、立体倉庫自動化システムを提供し、該システムは、
スタッカーと通信する場合にスタッカーに正常作業タスクを送信し、計算力センターに中間テーブルを送信するための倉庫管理システムと、
中間テーブルを記憶するための計算力センターであって、中間テーブルには少なくとも倉庫管理システムの完了していない作業タスクが記録されている、計算力センターと、
倉庫管理システムから送信された正常作業タスクを受信したときに、正常作業タスクを実行するためのスタッカーであって、倉庫管理システムとの通信が中断した場合に、画像認識システムにタスク割り当てリクエストを送信するために、画像認識システムにより返送された臨時作業タスク及び目標ロケーションの位置を受信し、目標ロケーションの位置に基づいて臨時作業タスクを実行する、スタッカーと、
スタッカーから送信されたタスク割り当てリクエストを受信したことに応答して、計算力センターから中間テーブルを取得するための画像認識システムであって、画像認識モデルにより立体倉庫の第1アイル内の複数枚の画像を認識して、第1アイルの複数のロケーションの保管状態情報を得、中間テーブルに基づいてスタッカーの臨時作業タスクを決定し、第1アイルの複数のロケーションの保管状態情報に基づいて、臨時作業タスクに対応する目標ロケーションの位置を決定し、スタッカーに臨時作業タスク及び目標ロケーションの位置を送信する、画像認識システムと、を備える。
【0007】
本開示の第3態様によれば、画像認識システムに適用されるスタッカーの制御装置を提供し、該制御装置は、
スタッカーから送信されたタスク割り当てリクエストを受信したことに応答して、中間テーブルを取得するための第1取得モジュールであって、中間テーブルには少なくとも倉庫管理システムの完了していない作業タスクが記録されており、タスク割り当てリクエストは倉庫管理システムとの通信が中断した場合にスタッカーが送信したものである、第1取得モジュールと、
画像認識モデルにより立体倉庫の第1アイル内の複数枚の画像を認識して、第1アイルの複数のロケーションの保管状態情報を得るための認識モジュールと、
中間テーブルに基づいてスタッカーの臨時作業タスクを決定するための第1決定モジュールと、
第1アイルの複数のロケーションの保管状態情報に基づいて、臨時作業タスクに対応する目標ロケーションの位置を決定するための第2決定モジュールと、
スタッカーにより目標ロケーションの位置に基づいて臨時作業タスクを実行するために、臨時作業タスク及び目標ロケーションの位置をスタッカーに送信するための第1送信モジュールと、を備える。
【0008】
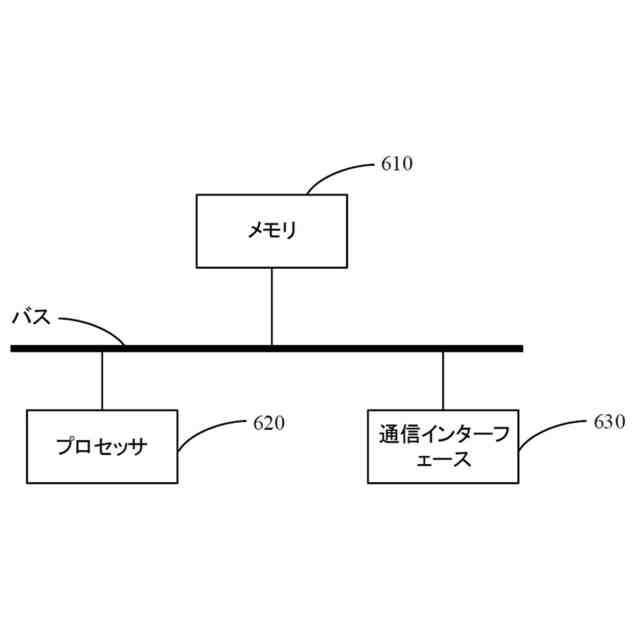
本開示の第4態様によれば、電子デバイスを提供し、当該デバイスは、
少なくとも1つのプロセッサと、
該少なくとも1つのプロセッサと通信接続されるメモリと、を備え、
該メモリには、該少なくとも1つのプロセッサで実行可能な命令が記憶され、該命令は、該少なくとも1つのプロセッサによって実行されると、本開示の実施例におけるいずれか1つの方法を実行させる。
【0009】
本開示の第5態様によれば、本開示の実施例におけるいずれか1つの方法をコンピュータに実行させるためのコンピュータ命令を記憶した非一時的なコンピュータ可読記憶媒体を提供する。
【0010】
本開示の第6様態によれば、プログラムを提供し、該プログラムは、プロセッサにより実行されると、本開示の実施例におけるいずれか1つの方法を実現する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
9か月前
個人
ゴミ箱
8か月前
個人
包装体
9か月前
個人
コンベア
1か月前
個人
段ボール箱
3か月前
個人
段ボール箱
3か月前
個人
ゴミ収集器
3か月前
個人
容器
5か月前
個人
楽ちんハンド
1か月前
個人
パウチ補助具
8か月前
個人
宅配システム
3か月前
個人
角筒状構造体
1か月前
個人
土嚢運搬器具
4か月前
個人
折り畳み水槽
9か月前
個人
お薬の締結装置
2か月前
個人
閉塞装置
6か月前
個人
ダンボール宝箱
9か月前
個人
コード類収納具
4か月前
個人
貯蔵サイロ
3か月前
個人
蓋閉止構造
7日前
個人
圧縮収納袋
9か月前
個人
蓋閉止構造
7日前
個人
ゴミ処理機
5か月前
株式会社和気
包装用箱
5か月前
個人
把手付米袋
28日前
株式会社コロナ
梱包材
1か月前
個人
塗料容器用蓋
9か月前
株式会社新弘
容器
8か月前
株式会社新弘
容器
8か月前
三甲株式会社
蓋体
5か月前
個人
コード折り畳み器具
19日前
個人
輸送積荷用動吸振器
2か月前
三甲株式会社
蓋体
4か月前
個人
搬送システム
3か月前
株式会社イシダ
搬送装置
2か月前
積水樹脂株式会社
接着剤
8か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ