TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090004
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2024184078
出願日
2024-10-18
発明の名称
自動走行方法、自動走行プログラム、及び自動走行システム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250609BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両による作業性が向上する自動走行開始条件を設定することが可能な自動走行方法、自動走行プログラム、及び自動走行システムを提供すること。
【解決手段】走行処理部111は、予め設定された目標経路に対する作業車両1の偏差が所定の自動走行開始条件を満たす場合に、作業車両1の自動走行を開始させる。設定処理部112は、作業車両1の走行情報及び作業情報の少なくともいずれかに基づいて、自動走行開始条件を設定する。
【選択図】図1
特許請求の範囲
【請求項1】
予め設定された目標経路に対する作業車両の偏差が所定の条件を満たす場合に、前記作業車両の自動走行を開始させることと、
前記作業車両の走行情報及び作業情報の少なくともいずれかに基づいて、前記条件を設定することと、
を実行する自動走行方法。
続きを表示(約 1,300 文字)
【請求項2】
前記目標経路に対する前記作業車両の横方向偏差、方位角偏差、及び車輪角偏差の少なくともいずれかの前記偏差が閾値以下の場合に、前記作業車両の自動走行を開始させ、
前記作業車両の進行方向に基づいて前記閾値を設定する、
請求項1に記載の自動走行方法。
【請求項3】
前記作業車両の進行方向が前進方向の場合に、前記閾値を第1閾値に設定し、
前記作業車両の進行方向が後進方向の場合に、前記閾値を前記第1閾値より大きい第2閾値に設定する、
請求項2に記載の自動走行方法。
【請求項4】
前記目標経路に対する前記作業車両の横方向偏差、方位角偏差、及び車輪角偏差の少なくともいずれかの前記偏差が閾値以下の場合に、前記作業車両の自動走行を開始させ、
前記作業車両の作業機の姿勢に基づいて前記閾値を設定する、
請求項1に記載の自動走行方法。
【請求項5】
前記作業機の姿勢が作業姿勢の場合に、前記閾値を第1閾値に設定し、
前記作業機の姿勢が非作業姿勢の場合に、前記閾値を前記第1閾値より大きい第2閾値に設定する、
請求項4に記載の自動走行方法。
【請求項6】
前記目標経路に対する前記作業車両の横方向偏差、方位角偏差、及び車輪角偏差の少なくともいずれかの前記偏差が閾値以下の場合に、前記作業車両の自動走行を開始させ、
前記作業車両の作業内容に基づいて前記閾値を設定する、
請求項1に記載の自動走行方法。
【請求項7】
前記作業内容が所定の精度以上の作業精度を要する作業である場合に、前記閾値を第1閾値に設定し、
前記作業内容が前記所定の精度未満の作業精度を要する作業である場合に、前記閾値を前記第1閾値より大きい第2閾値に設定する、
請求項6に記載の自動走行方法。
【請求項8】
前記目標経路に対する前記作業車両の横方向偏差、方位角偏差、及び車輪角偏差の少なくともいずれかの前記偏差が閾値以下の場合に、前記作業車両の自動走行を開始させ、
前記作業車両の現在位置から前記目標経路における作業開始目標位置又は作業終了目標位置までの距離に基づいて前記閾値を設定する、
請求項1に記載の自動走行方法。
【請求項9】
前記距離が所定距離未満の場合に、前記閾値を第1閾値に設定し、
前記距離が前記所定距離以上の場合に、前記閾値を前記第1閾値より大きい第2閾値に設定する、
請求項8に記載の自動走行方法。
【請求項10】
前記目標経路に対する前記作業車両の横方向偏差、方位角偏差、及び車輪角偏差の少なくともいずれかの前記偏差が閾値以下の場合に、前記作業車両の自動走行を開始させ、
前記作業車両の走行目的が、前記目標経路に対する位置合わせのための走行であるか否かに基づいて前記閾値を設定する、
請求項1に記載の自動走行方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場において作業車両を目標経路に従って自動走行させる技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、圃場において作業車両を目標経路に従って自動走行させる技術が知られている。また、作業車両の位置及び方位が自動走行の開始条件(以下、自動走行開始条件という。)を満たす場合に、作業車両の自動走行を開始させる技術が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6253678号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、自動走行開始条件が一律に設定されるため、作業車両による作業性が低下する問題が生じる。例えば自動走行開始条件が緩い条件(自動走行開始条件を満たし易い条件)の場合、自動走行が許可され易くなるため、例えば高精度の作業精度を要する作業の場合に作業精度が低下する可能性がある。また例えば自動走行開始条件が厳しい条件(自動走行開始条件を満たし難い条件)の場合、自動走行が許可され難くなるため、例えば高精度の作業精度を要しない作業の場合に作業効率が低下する可能性がある。
【0005】
本発明の目的は、作業車両による作業性が向上する自動走行開始条件を設定することが可能な自動走行方法、自動走行プログラム、及び自動走行システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る自動走行方法は、予め設定された目標経路に対する作業車両の偏差が所定の条件を満たす場合に、前記作業車両の自動走行を開始させることと、前記作業車両の走行情報及び作業情報の少なくともいずれかに基づいて、前記条件を設定することと、を実行する方法である。
【0007】
本発明に係る自動走行プログラムは、予め設定された目標経路に対する作業車両の偏差が所定の条件を満たす場合に、前記作業車両の自動走行を開始させることと、前記作業車両の走行情報及び作業情報の少なくともいずれかに基づいて、前記条件を設定することと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【0008】
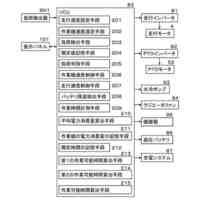
本発明に係る自動走行システムは、走行処理部と設定処理部とを備える。前記走行処理部は、予め設定された目標経路に対する作業車両の偏差が所定の条件を満たす場合に、前記作業車両の自動走行を開始させる。前記設定処理部は、前記作業車両の走行情報及び作業情報の少なくともいずれかに基づいて、前記条件を設定する。
【発明の効果】
【0009】
本発明によれば、作業車両による作業性が向上する自動走行開始条件を設定することが可能な自動走行方法、自動走行プログラム、及び自動走行システムを提供することができる。
【図面の簡単な説明】
【0010】
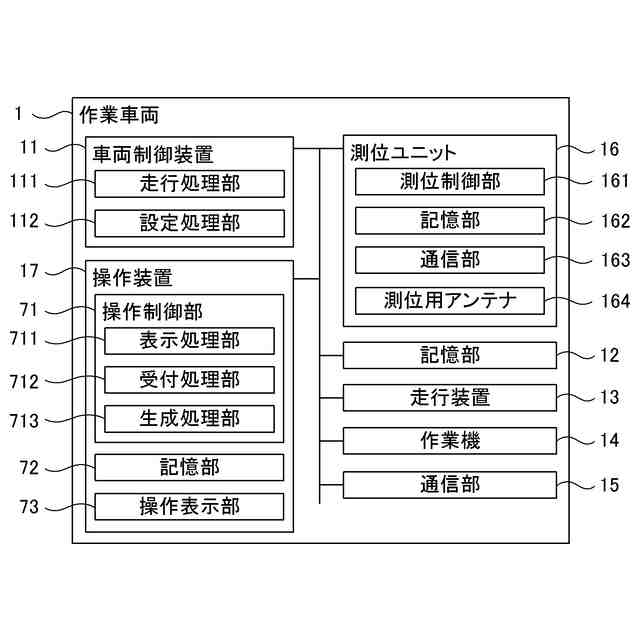
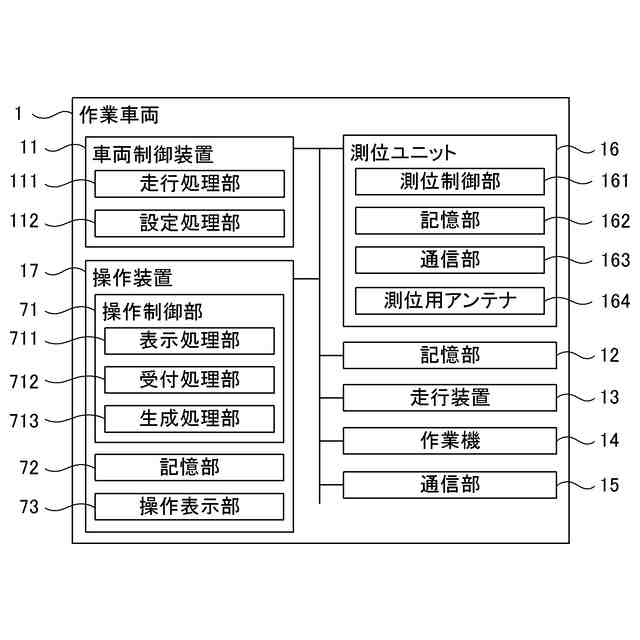
図1は、本発明の実施形態に係る作業車両の構成を示すブロック図である。
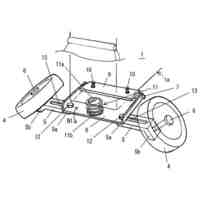
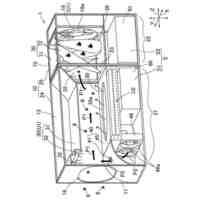
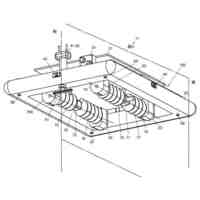
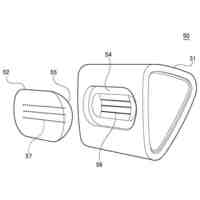
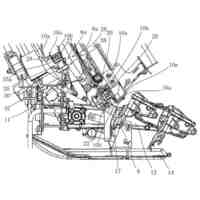
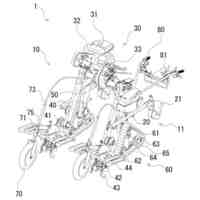
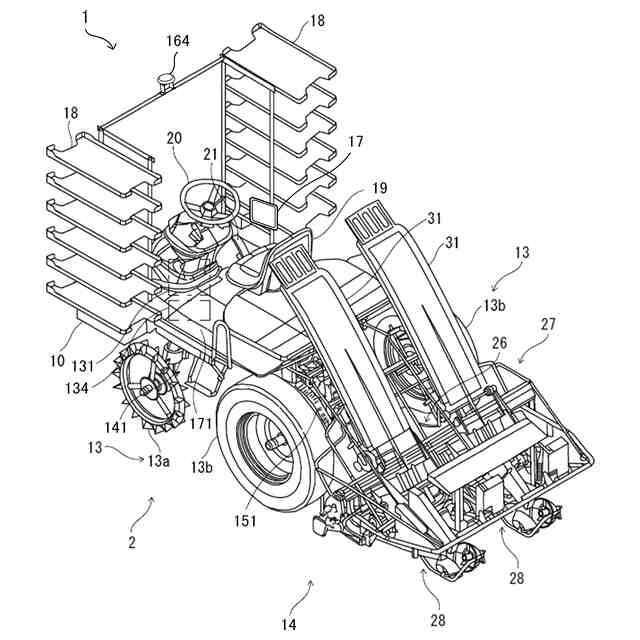
図2は、本発明の実施形態に係る作業車両の一例を示す外観図である。
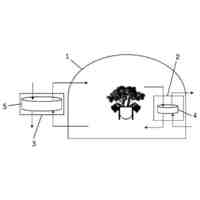
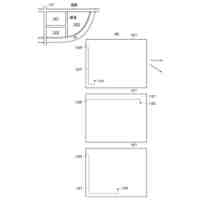
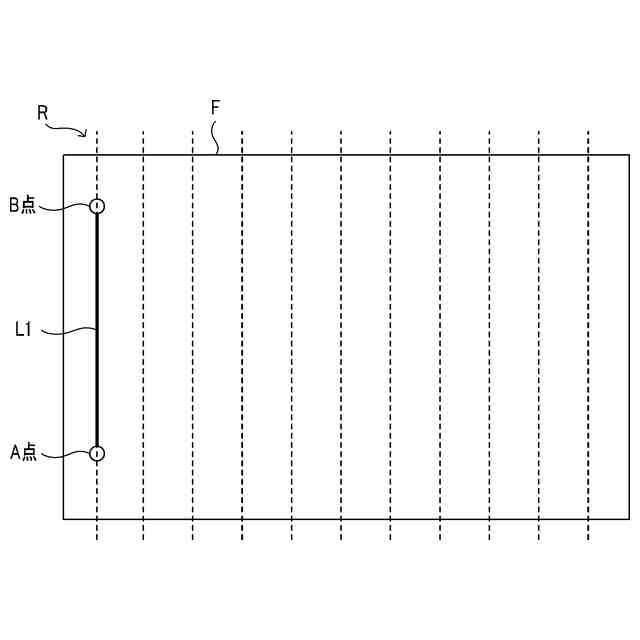
図3は、本発明の実施形態に係る作業車両の目標経路の一例を示す図である。
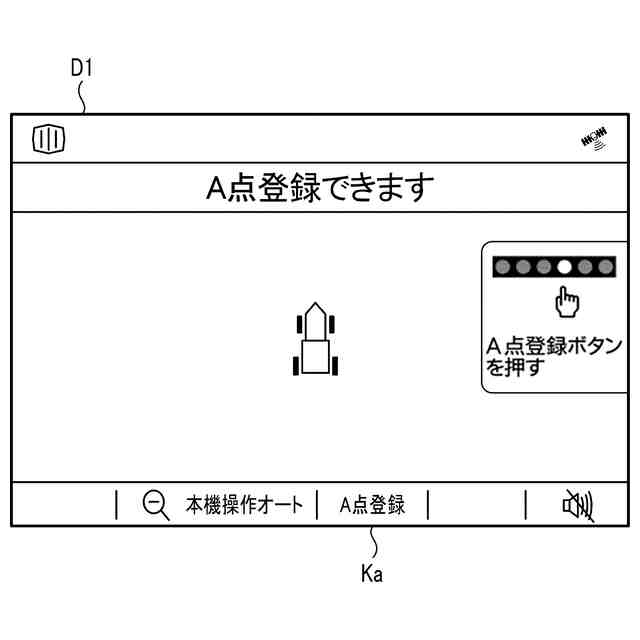
図4Aは、本発明の実施形態に係る操作装置に表示される設定画面の一例を示す図である。
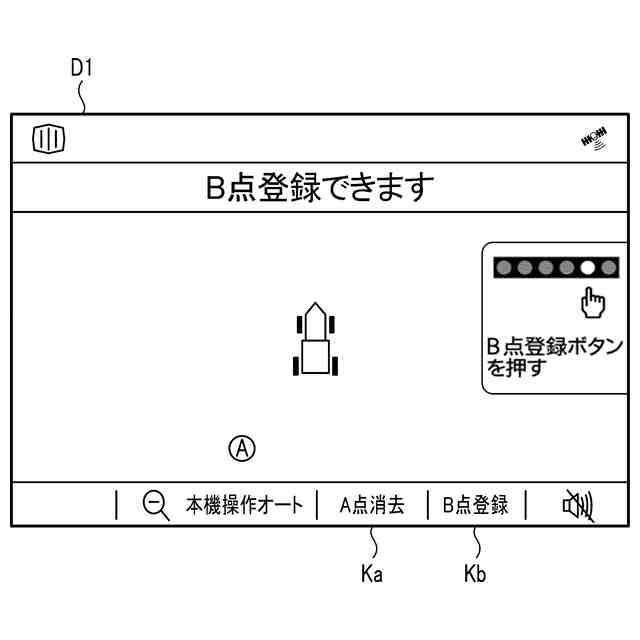
図4Bは、本発明の実施形態に係る操作装置に表示される設定画面の一例を示す図である。
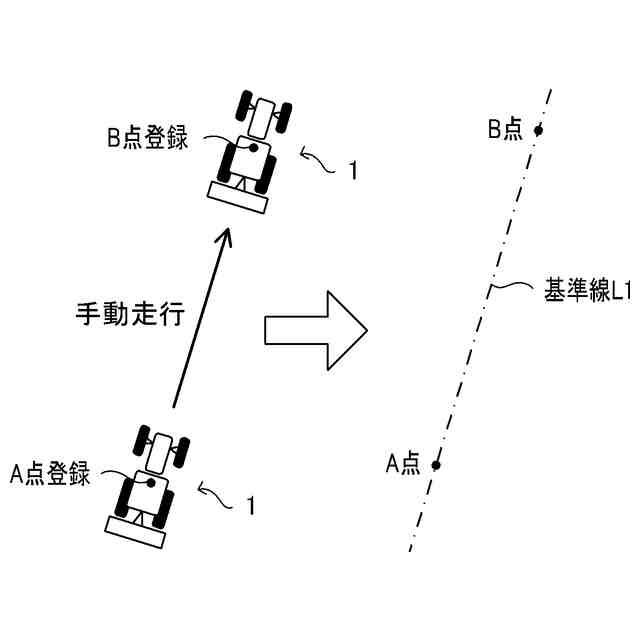
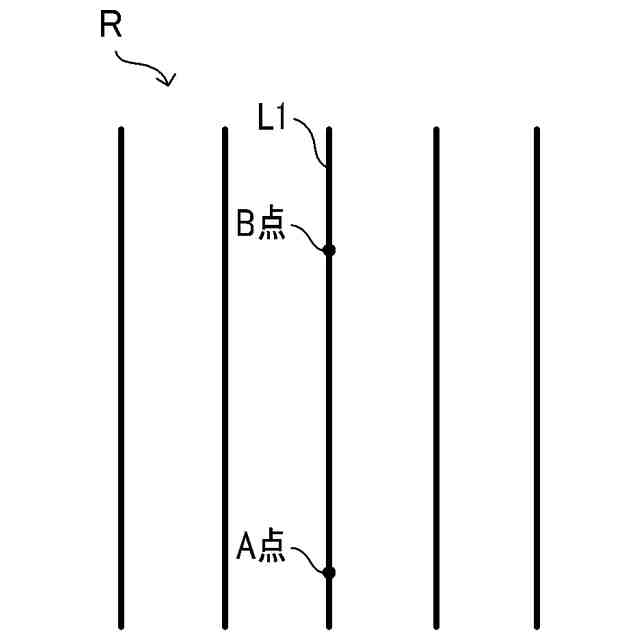
図5Aは、本発明の実施形態に係る経路生成方法を説明するための図である。
図5Bは、本発明の実施形態に係る経路生成方法を説明するための図である。
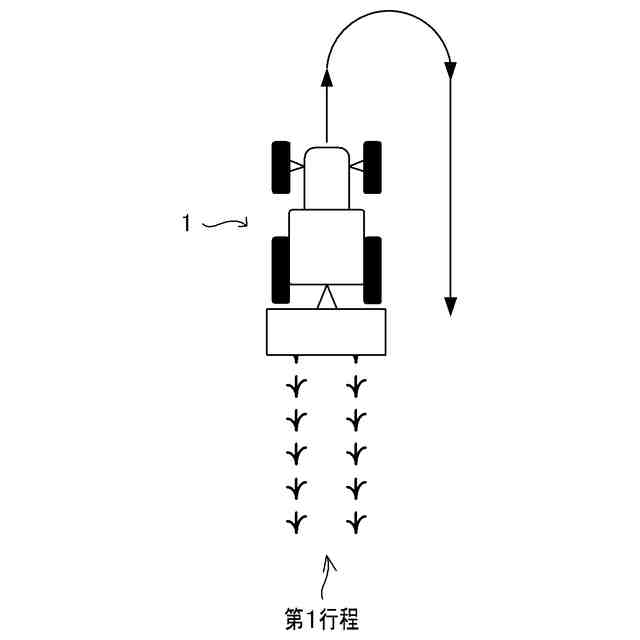
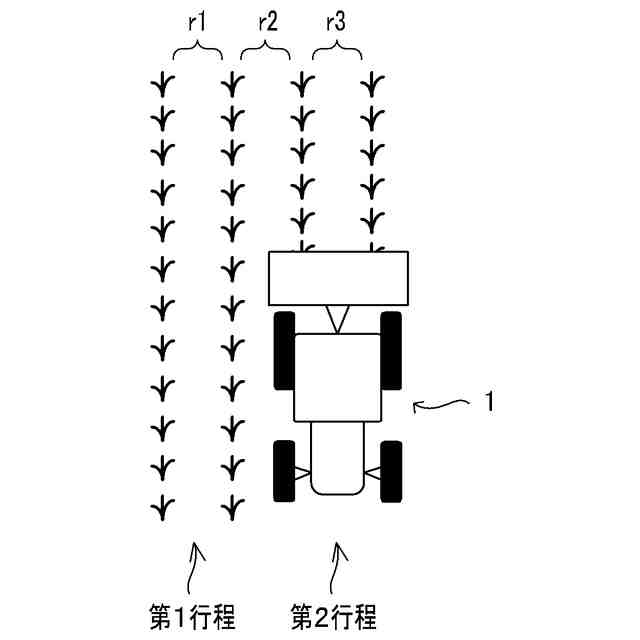
図6Aは、本発明の実施形態に係る作業車両の走行方法の具体例を示す図である。
図6Bは、本発明の実施形態に係る作業車両の走行方法の具体例を示す図である。
図7は、本発明の実施形態に係る作業車両の目標経路に対する偏差の具体例を示す図である。
図8は、本発明の実施形態に係る第1設定方法に対応する設定情報の一例を示す図である。
図9は、本発明の実施形態に係る第2設定方法に対応する設定情報の一例を示す図である。
図10は、本発明の実施形態に係る第3設定方法に対応する設定情報の一例を示す図である。
図11は、本発明の実施形態に係る第4設定方法を説明するための図である。
図12は、本発明の実施形態に係る第4設定方法に対応する設定情報の一例を示す図である。
図13は、本発明の実施形態に係る作業車両によって実行される自動走行処理の手順の一例を示すフローチャートである。
図14は、本発明の実施形態に係る第6設定方法に対応する設定情報の一例を示す図である。
図15は、本発明の実施形態に係る第7設定方法に対応する設定情報の一例を示す図である。
図16は、本発明の実施形態に係る第8設定方法に対応する設定情報の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
枝切機
26日前
個人
苗キャップ
23日前
個人
尿処理材
11日前
個人
飼槽
1か月前
個人
ペット用フード容器
1か月前
個人
園芸用自走車
27日前
株式会社アテックス
草刈機
19日前
井関農機株式会社
育苗培地
1か月前
株式会社アピア
ルアー
1か月前
個人
水耕栽培システム
20日前
井関農機株式会社
圃場管理装置
11日前
個人
害虫捕獲装置
1か月前
井関農機株式会社
圃場管理装置
11日前
井関農機株式会社
収穫作業車両
1か月前
井関農機株式会社
圃場管理装置
11日前
井関農機株式会社
圃場管理装置
3日前
株式会社西部技研
空調システム
16日前
株式会社シマノ
釣竿
13日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
11日前
株式会社LIXIL
検知装置
1か月前
三菱マヒンドラ農機株式会社
移植機
1か月前
個人
ペット用歯磨き用具セット
25日前
株式会社丹勝
TK防草植込式緑化工法
1か月前
ダイハツ工業株式会社
草刈り機
23日前
三菱マヒンドラ農機株式会社
耕耘作業機
13日前
合同会社小林知財研鑽処
液体空気散布船
20日前
井関農機株式会社
作業車両
11日前
関東農機株式会社
ロータリ管理機
19日前
株式会社シマノ
釣竿及び着脱部材
1か月前
井関農機株式会社
作業車両
1か月前
株式会社クボタ
田植機
27日前
井関農機株式会社
水田管理システム
3日前
伯東株式会社
水処理組成物及び水処理方法
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ