TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089555
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2025056172,2022171778
出願日
2025-03-28,2022-10-26
発明の名称
運転支援装置、運転支援方法、及びプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/16 20060101AFI20250605BHJP(信号)
要約
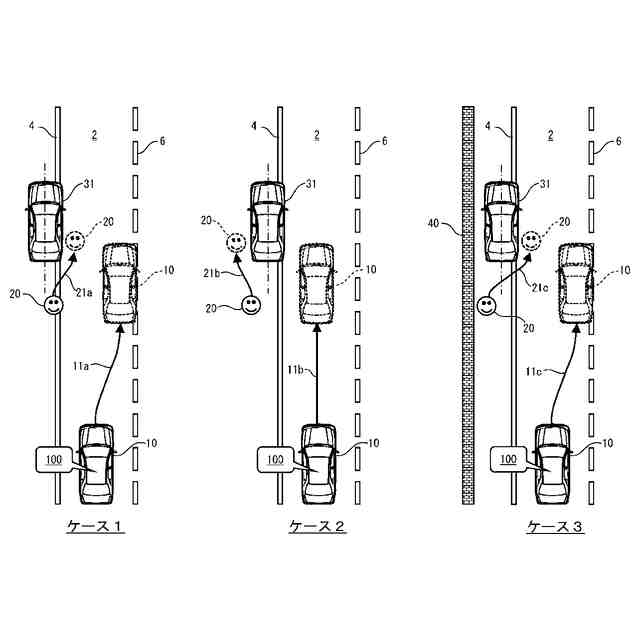
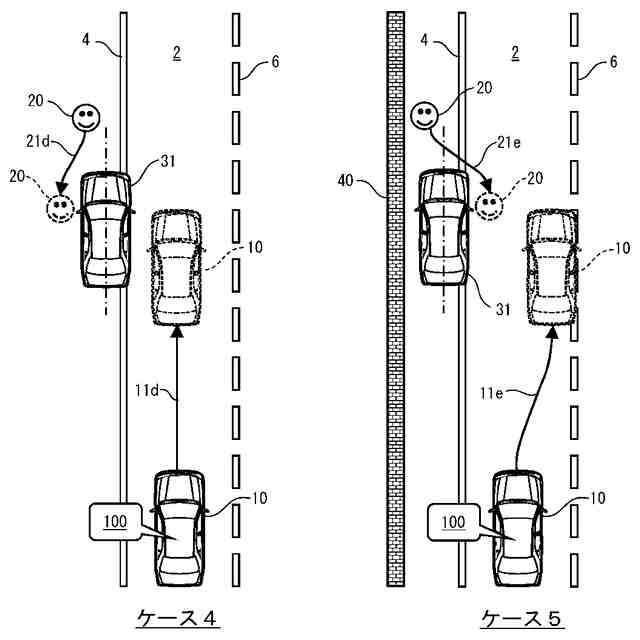
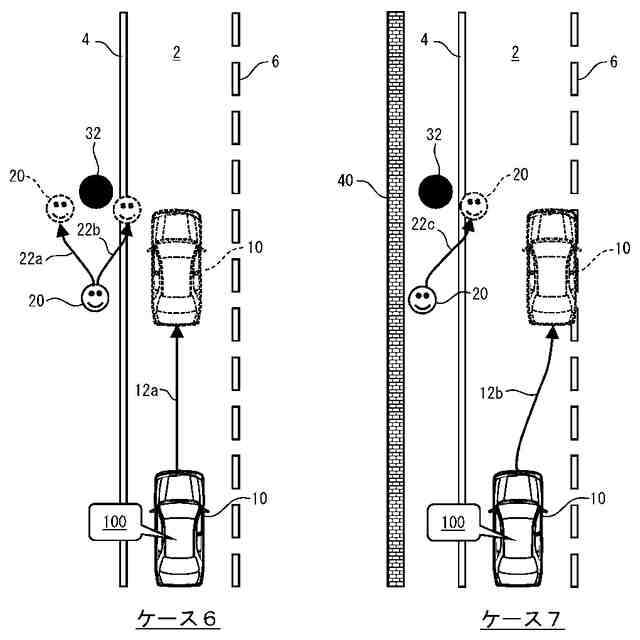
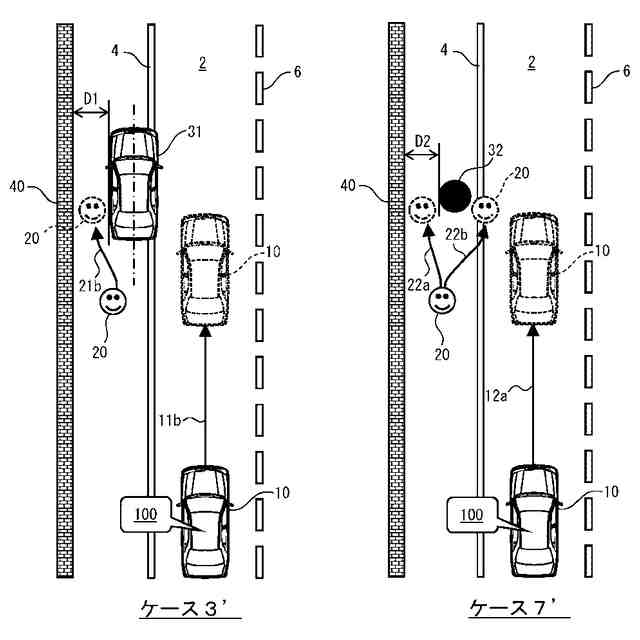
【課題】乗員に煩わしさを感じさせることを低減しつつ、自車両の前に飛び出してくる歩行者等の移動体との衝突を未然に回避することができる改良された技術を提供する。
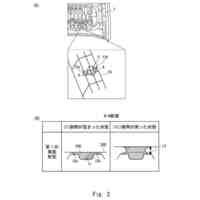
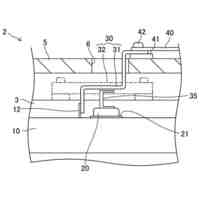
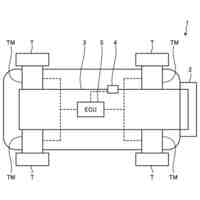
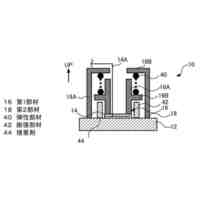
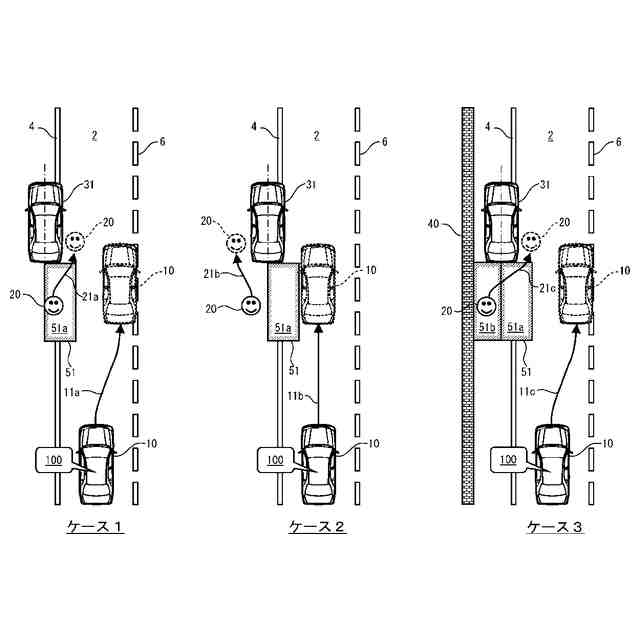
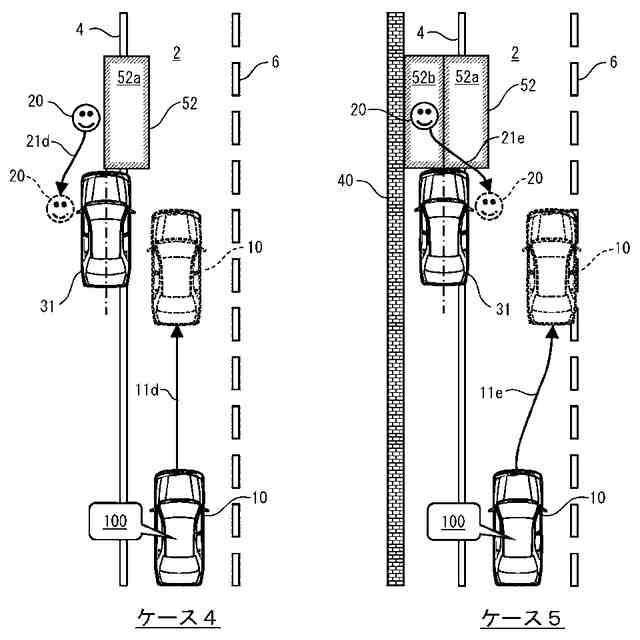
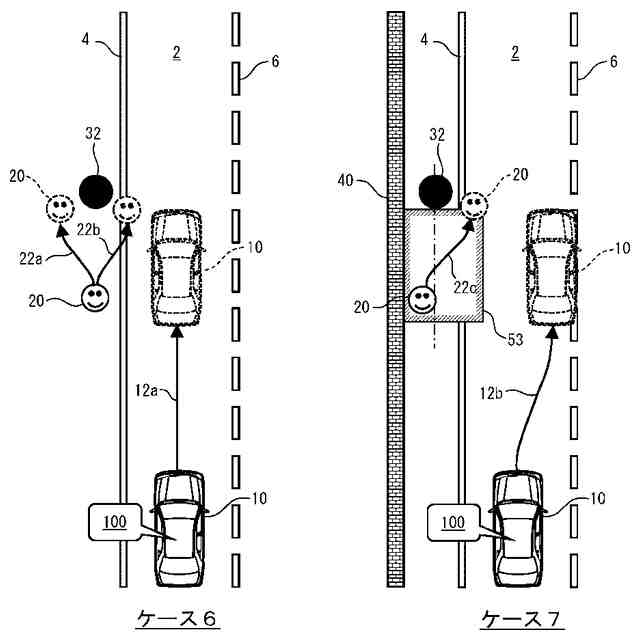
【解決手段】本開示の運転支援装置100は、以下の処理を実行するように構成されている。第1の処理は、自車両10の前方に存在する移動体20を検知することである。第2の処理は、移動体20の前方に位置し、移動体20の直進方向の移動を妨げる第1障害物31を検知することである。第3の処理は、第1障害物31との協働作用により、直進方向と直交する方向において移動体20に自車両10に近づく移動を強いる第2障害物40の有無を判定することである。そして、第4の処理は、第2障害物40が存在する場合は、第2障害物40が存在しない場合よりも移動体20を回避するための操舵支援を実行されやすくすることである。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の前方に存在する移動体を検知することと、
前記移動体の前方に位置し、前記移動体の直進方向の移動を妨げる第1障害物を検知することと、
前記第1障害物との協働作用により、前記直進方向と直交する方向において前記移動体に前記自車両に近づく移動を強いる第2障害物の有無を判定することと、
前記第2障害物が存在する場合は、前記第2障害物が存在しない場合よりも前記移動体を回避するための操舵支援を実行されやすくすることと、を実行するように構成されている
ことを特徴とする運転支援装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記操舵支援を実行されやすくすることは、
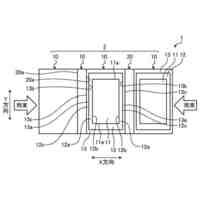
前記直進方向において前記第1障害物に対し前記移動体の側に広がる支援実行エリアに前記移動体が位置している場合に前記操舵支援を行うことと、
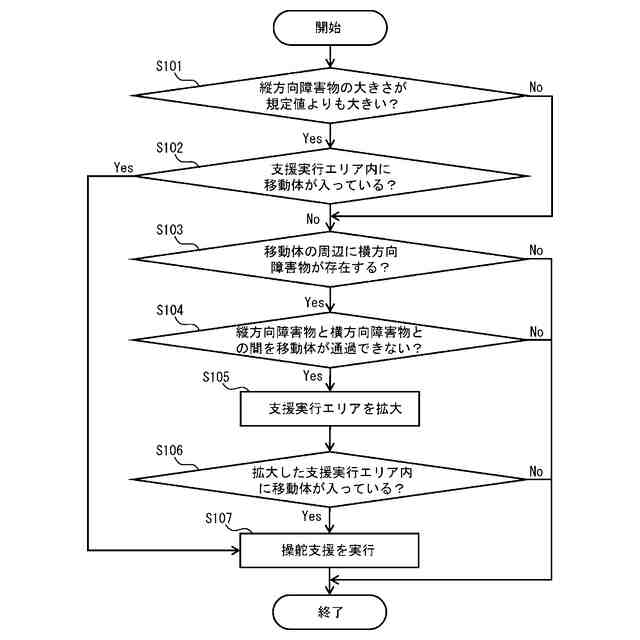
前記第2障害物が存在する場合は前記第2障害物が存在しない場合よりも前記支援実行エリアを拡大することと、を含む
ことを特徴とする運転支援装置。
【請求項3】
請求項2に記載の運転支援装置において、
前記支援実行エリアを拡大することは、
前記直進方向と直交する方向において前記自車両の走行車線に近い側から遠い側へ前記支援実行エリアを拡大すること、を含む
ことを特徴とする運転支援装置。
【請求項4】
請求項3に記載の運転支援装置において、
前記支援実行エリアを拡大することは、
前記第2障害物が存在しない場合は、前記直進方向と直交する方向において前記第1障害物に対し前記走行車線の側にある第1のエリアを前記支援実行エリアとして設定し、
前記第2障害物が存在する場合は、前記直進方向と直交する方向において前記第1障害物に対し前記走行車線とは反対の側にある第2のエリアと前記第1のエリアとを前記支援実行エリアとして設定すること、を含む
ことを特徴とする運転支援装置。
【請求項5】
請求項2に記載の運転支援装置において、
前記支援実行エリアを拡大することは、
前記第2障害物が存在しない場合は前記支援実行エリアを設けず、前記第2障害物が存在する場合は前記支援実行エリアを設けること、を含む
ことを特徴とする運転支援装置。
【請求項6】
請求項5に記載の運転支援装置において、
前記支援実行エリアを設けることは、
前記直進方向と直交する方向において前記第1障害物に対し前記自車両の走行車線とは反対の側のエリアを前記支援実行エリアの少なくとも一部として設定すること、を含む
ことを特徴とする運転支援装置。
【請求項7】
請求項1に記載の運転支援装置において、
前記操舵支援を実行されやすくすることは、
前記移動体の将来位置の予測範囲が前記自車両の軌道と重なる場合に前記操舵支援を行うことと、
前記第2障害物が存在する場合は前記第2障害物が存在しない場合よりも前記直進方向と直交する方向において前記自車両の走行車線に近い側に前記予測範囲を設定することと、を含む
ことを特徴とする運転支援装置。
【請求項8】
請求項1乃至7のいずれか1項に記載の運転支援装置において、
前記第2障害物は、前記直進方向と直交する方向における前記第1障害物との距離が下限値よりも小さい物体である
ことを特徴とする運転支援装置。
【請求項9】
請求項1乃至7のいずれか1項に記載の運転支援装置において、
前記第2障害物は、それ自体が前記移動体に与える作用と前記第1障害物が前記移動体に与える作用とが組み合わさり協調することによって発生する作用によって、前記移動体に前記自車両の走行車線の方に向かう前記直進方向と直交する方向の移動を強いる障害物である
ことを特徴とする運転支援装置。
【請求項10】
請求項1乃至7のいずれか1項に記載の運転支援装置において、
前記第2障害物は、それ自体と前記第1障害物と前記移動体とを含む3要素間の位置関係が前記移動体に与える物理的な制約により、前記移動体が前記自車両の走行車線の方に向かう前記直進方向と直交する方向への移動を行う蓋然性を高めうる障害物である
ことを特徴とする運転支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自車両の前に飛び出してくる移動体との衝突を回避するように自車両の操舵を支援する運転支援技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特開2019-028951号公報には、自車両の前に飛び出してくる歩行者との衝突を未然に回避する技術が開示されている。この従来技術において想定されている歩行者の飛び出しのパターンは、歩行者の移動方向に存在する障害物を避けようとして歩行者が道路側に飛び出してくるパターンである。従来技術では、障害物の手前に設定された支援エリアに歩行者がいる場合、その歩行者が自車両の前に飛び出してくる蓋然性は高いと判断される。そして、その場合、自車両が歩行者から離れるように操舵支援が行われる。
【0003】
上記の従来技術によれば、支援エリアを大きくするほど歩行者との衝突リスクを下げることができる。ただし、支援エリアを大きくし過ぎると不要な操舵支援が多く作動し、乗員に煩わしさを感じさせてしまう。一方、支援エリアを小さくし過ぎると、自車両の方に飛び出すおそれがある歩行者が支援エリアから外れてしまう場合がある。従来技術では支援エリア外の歩行者に対して操舵支援は行われない。このため、支援エリア外の歩行者が自車両の前に飛び出してきた場合には、衝突リスクが高まってしまう虞がある。ゆえに、自車両の前に飛び出してくる歩行者との衝突を未然に回避する上では、支援エリアを適切な範囲に設定することが重要である。
【0004】
ところが、上記の従来技術では、歩行者の移動方向に存在する障害物のみを基準として支援エリアの範囲が決められている。歩行者が自車両の前に飛び出すかどうかは、確かに歩行者とその移動を妨げる障害物との位置関係に依存する。しかし、歩行者の移動方向を決定する要因は、歩行者の移動方向に存在する障害物だけではない。障害物に対して自車両と反対の側に壁や生垣が存在する場合、歩行者の移動方向は壁や生垣による制約を受ける。そのような制約の有無によって、歩行者が自車両の前に飛び出してくる可能性は異なったものとなる。
【0005】
なお、本開示に関連する技術分野の技術水準を示す文献としては、特開2019-043313号公報を例示することができる。
【先行技術文献】
【特許文献】
【0006】
特開2019-028951号公報
特開2019-043313号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本開示は、上記の課題に鑑みてなされたものである。本開示は、乗員に煩わしさを感じさせることを抑えつつ、自車両の前に飛び出してくる歩行者等の移動体との衝突を未然に回避することができる改良された技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本開示は運転支援装置を提供する。本開示の運転支援装置は、以下の処理を実行するように構成されている。第1の処理は、自車両の前方に存在する移動体を検知することである。第2の処理は、移動体の縦方向の移動を妨げる第1障害物を検知することである。第3の処理は、横方向において第1障害物に対し自車両の走行車線とは反対の側に位置し、第1障害物との協働作用によって移動体に走行車線の方に向かう横方向の移動を強いる第2障害物の有無を判定することである。そして、第4の処理は、第2障害物が存在する場合は第2障害物が存在しない場合よりも移動体を回避するための操舵支援の実行条件を緩和することである。
【0009】
また、上記目的を達成するため、本開示は車載コンピュータによって実行される運転支援方法を提供する。本開示の運転支援装方法は、以下のステップを含む。第1のステップは、自車両の前方に存在する移動体を検知することである。第2のステップは、移動体の縦方向の移動を妨げる第1障害物を検知することである。第3のステップは、横方向において第1障害物に対し自車両の走行車線とは反対の側に位置し、第1障害物との協働作用によって移動体に走行車線の方に向かう横方向の移動を強いる第2障害物の有無を判定することである。そして、第4のステップは、第2障害物が存在する場合は第2障害物が存在しない場合よりも移動体を回避するための操舵支援の実行条件を緩和することである。
【0010】
さらに、上記目的を達成するため、本開示はプログラムを提供する。本開示のプログラムは、上記の運転支援方法を車載コンピュータに実行させるように構成されている。本開示のプログラムは、コンピュータで読み取り可能な記録媒体に記録されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
端末
3日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
パネル
10日前
トヨタ自動車株式会社
組電池
2日前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
組電池
3日前
トヨタ自動車株式会社
電源装置
10日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
内燃機関
7日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
冷却装置
2日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
空気軸受
1日前
トヨタ自動車株式会社
情報機器
10日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
水系電池
7日前
トヨタ自動車株式会社
防曇装置
7日前
トヨタ自動車株式会社
誘導電動機
7日前
トヨタ自動車株式会社
カバー部材
10日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
電池パック
7日前
トヨタ自動車株式会社
溶接ヘッド
3日前
トヨタ自動車株式会社
溶接ヘッド
2日前
トヨタ自動車株式会社
電源システム
8日前
トヨタ自動車株式会社
運転支援装置
10日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
バスバー構造
10日前
トヨタ自動車株式会社
駐車支援装置
2日前
トヨタ自動車株式会社
認証システム
8日前
トヨタ自動車株式会社
冷却システム
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ