TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083351
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2025024016,2020219048
出願日
2025-02-18,2020-12-28
発明の名称
飛行型ロボット
出願人
合同会社酒井総合研究所
代理人
個人
主分類
G08B
15/00 20060101AFI20250523BHJP(信号)
要約
【課題】簡易な構成によって、確実に監視対象を監視すること。
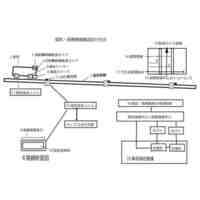
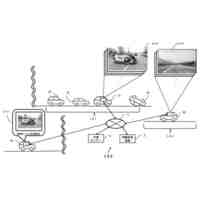
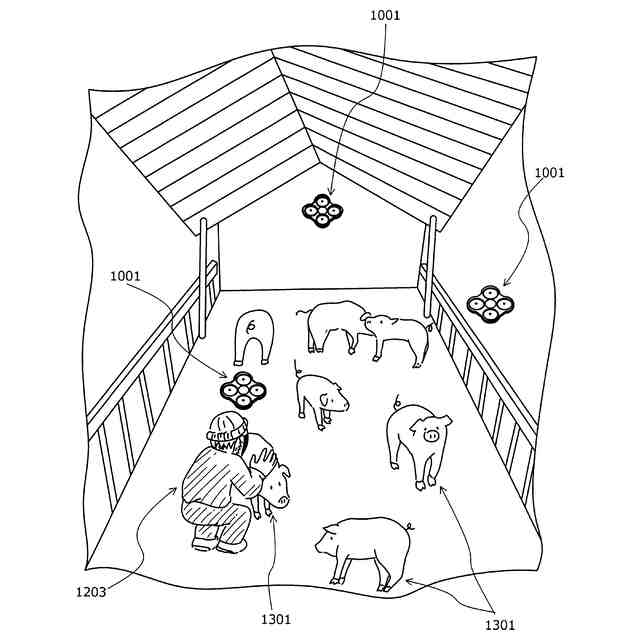
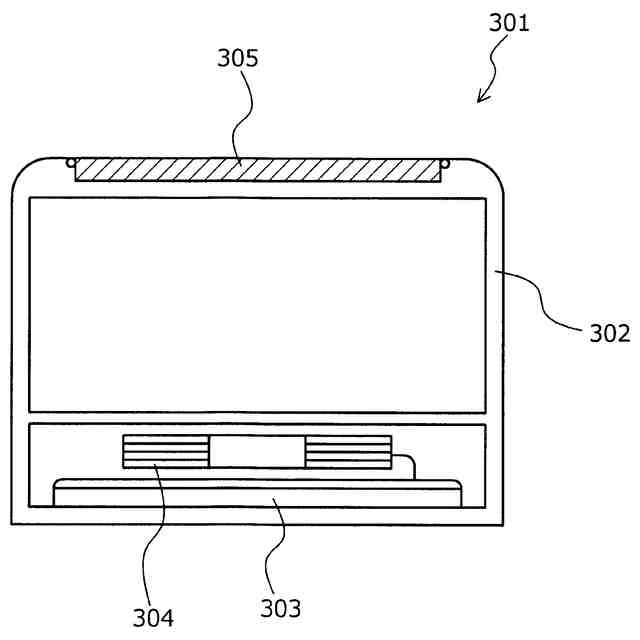
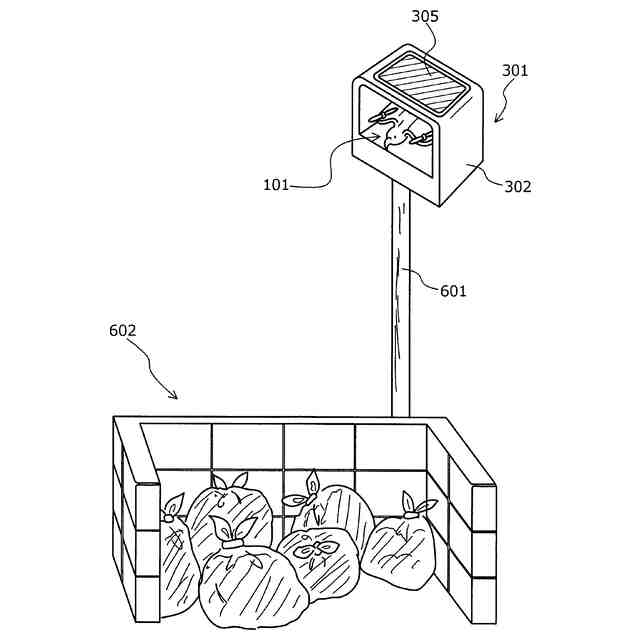
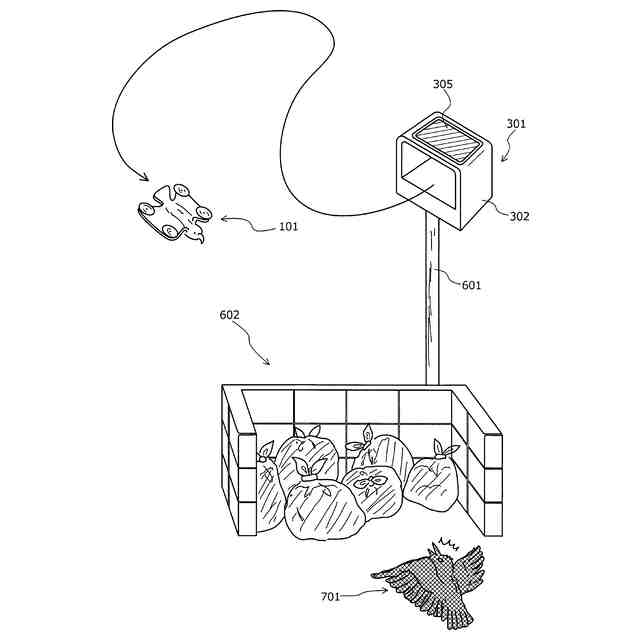
【解決手段】自動操縦により飛行する無人航空機に搭載されたカメラによって撮影された
画像に基づいて、農場に侵入した鳥獣や、農産物を窃盗する犯罪者などの監視対象を認識
した場合、当該監視対象に接近するように飛行する飛行型ロボット1001を構成した。
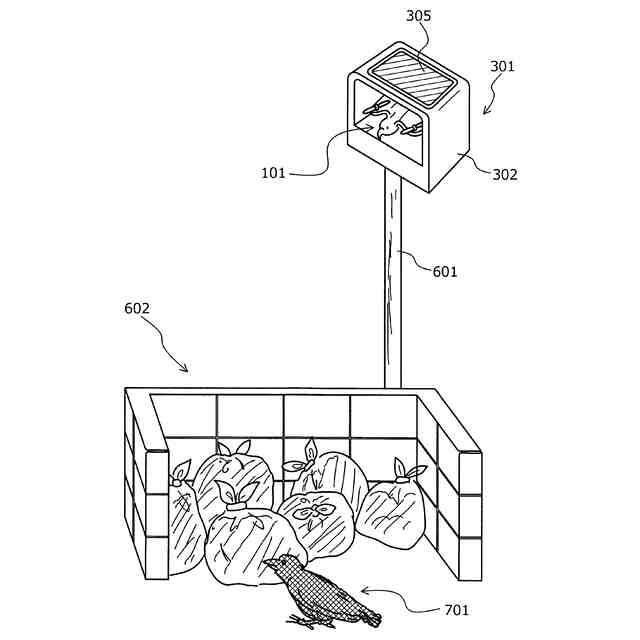
このように、カメラによって撮影された画像に基づいて監視対象を認識することにより、
赤外線センサーのみを用いて監視対象(犯罪者1203など)を検出する場合と比較して
、精度よく監視対象を認識することができる。そして、これにより、簡易な構成によって
、確実に監視対象を監視することができる。
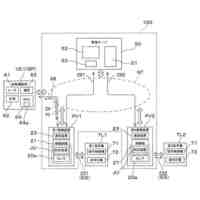
【選択図】図13
特許請求の範囲
【請求項1】
自動操縦により飛行する無人航空機と、
前記無人航空機に搭載されたカメラと、
を備え、
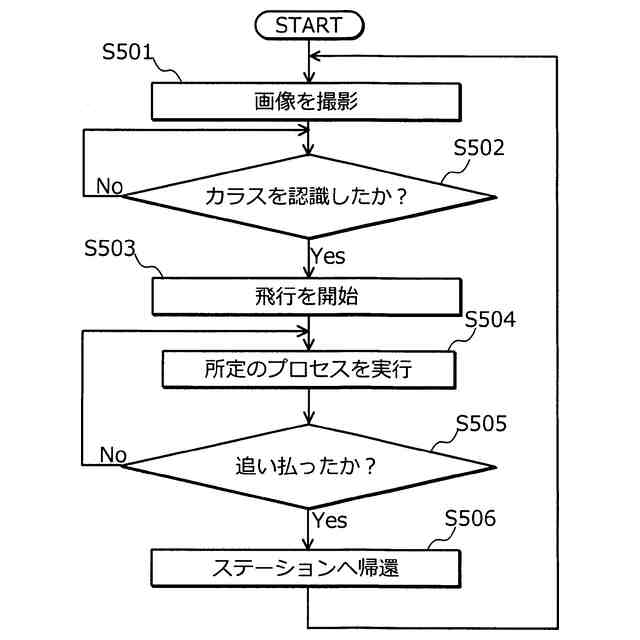
前記カメラによって撮影された画像に基づいて、監視対象を認識した場合、当該監視対象に接近するように飛行することを特徴とする飛行型ロボット。
続きを表示(約 760 文字)
【請求項2】
前記カメラによって撮影された画像に基づいて前記監視対象を認識した場合、当該監視対象の全方位からの画像を撮影するように飛行することを特徴とする請求項1に記載の飛行型ロボット。
【請求項3】
あらかじめ設定された所定の範囲内において前記カメラによって撮影された画像に基づいて、監視対象を認識することを特徴とする請求項1または2に記載の飛行型ロボット。
【請求項4】
前記所定の範囲は、農場であることを特徴とする請求項3に記載の飛行型ロボット。
【請求項5】
前記監視対象は、前記農場における農産物または当該農産物と推定される物品を所持または運搬する、鳥獣または人間であることを特徴とする請求項4に記載の飛行型ロボット。
【請求項6】
前記所定の範囲は、作物栽培農場であることを特徴とする請求項3または4に記載の飛行型ロボット。
【請求項7】
前記監視対象は、前記作物栽培農場における栽培作物または当該栽培作物と推定される物品を所持または運搬する、鳥獣または人間であることを特徴とする請求項6に記載の飛行型ロボット。
【請求項8】
前記所定の範囲は、畜産農場であることを特徴とする請求項3または4に記載の飛行型ロボット。
【請求項9】
前記監視対象は、前記畜産農場における家畜あるいは家禽、または、当該家畜あるいは家禽と推定される物品を所持または運搬する、鳥獣または人間であることを特徴とする請求項8に記載の飛行型ロボット。
【請求項10】
前記所定の範囲は、養蜂場であることを特徴とする請求項3または4に記載の飛行型ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、農場などを監視する飛行型ロボット、飛行型ロボットの制御プログラムおよび飛行型ロボットの制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、作物栽培農場や畜産農場などの農場における農産物(農畜産物)の盗難が問題となっている。盗難は、大抵の人間が就寝している深夜や未明におこなわれることが多く、監視カメラなどを用いて盗難の様子を録画することができても、盗難の現場を押さえるなどのリアルタイムでの対応をとることが難しい。
【0003】
関連する技術として、具体的には、従来、たとえば、圃場に設置された複数の通信装置が、人・動物・物体などが圃場に侵入したことを検出すると、当該検出を通知する信号を受信した通信端末装置(派遣部)から当該圃場の周辺に待機している管理機に派遣信号を出力し、この派遣信号を受信した管理機(マルチコプター)を、侵入を検出した通信装置の周辺に派遣するようにした圃場管理システムに関する技術があった(たとえば、下記特許文献1を参照。)。各通信装置の位置は、GPSを利用して自機の位置を特定する管理機が、通信装置から送信される自装置の識別情報と、当該識別情報を受信した位置とを関連付けることによって特定する。
【先行技術文献】
【特許文献】
【0004】
特開2019-16147号公報
特開2020-50099号公報
特開2020-144760号公報
国際公開第2020/110400号
特許第6405444号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1のような従来の技術は、複数の通信装置を圃場に設置したり、通信装置が圃場への侵入を検出した、通信端末装置(派遣部)を介して管理機を派遣したりするため、設備構成が複雑であるという問題があった。
【0006】
また、上述した特許文献1のような従来の技術は、圃場の広さにかかわらず一定の検出精度を確保するためには、圃場が広くなるほど、多くの通信装置を設置する必要があり、設備の維持にかかる管理者の負担が大きくなるという問題があった。
【0007】
また、上述した特許文献1のような従来の技術は、GPSを利用して自機の位置を特定する管理機が、通信装置から送信される自装置の識別情報と、当該識別情報を受信した位置とを関連付けることによって各通信装置の位置を特定するため、悪意のある第三者によって通信装置が取り外されて別の場所へ移動された場合、通信端末装置(派遣部)が、通信装置から圃場への侵入を検出した信号を受信しても、実際に侵入者がいる位置に管理機を派遣することができないという問題があった。
【0008】
この発明は、上述した従来技術による問題点を解消するため、簡易な構成によって、確実に監視対象を監視することができる飛行型ロボット、飛行型ロボットの制御プログラムおよび飛行型ロボットの制御方法を提供することを目的とする。
【0009】
特に、この発明は、上述した従来技術による問題点を解消するため、簡易な構成によって、農場における農産物への被害を防止することができる飛行型ロボット、飛行型ロボッ
トの制御プログラムおよび飛行型ロボットの制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
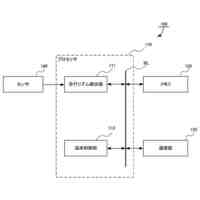
上述した課題を解決し、目的を達成するため、この発明にかかる飛行型ロボットは、自動操縦により飛行する無人航空機と、前記無人航空機に搭載されたカメラと、を備え、前記カメラによって撮影された画像に基づいて、監視対象を認識した場合、当該監視対象に接近するように飛行することを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
1か月前
個人
出会い頭事故防止装置
2か月前
個人
忘れ物検出装置
2か月前
能美防災株式会社
発信機
1か月前
ニッタン株式会社
発信機
21日前
ニッタン株式会社
発信機
21日前
個人
逆走・正走車両検出システム
1か月前
日本信号株式会社
情報管理システム
2か月前
日本信号株式会社
情報提供システム
1か月前
アズビル株式会社
建物管理システム
今日
ホーチキ株式会社
異常報知設備
12日前
ホーチキ株式会社
異常報知設備
21日前
ホーチキ株式会社
監視システム
2か月前
株式会社JVCケンウッド
通知システム
2か月前
株式会社SUBARU
車速制御システム
2か月前
個人
磁気・光学誘導路線による車両の運行制御
26日前
タック株式会社
安全監視システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
ホーチキ株式会社
非常通報システム
15日前
株式会社アジラ
注目行動呼びかけシステム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社フィットネスワン
見守りシステム
19日前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
日本信号株式会社
路側装置及びセンサ装置
2か月前
トヨタ自動車株式会社
配車システム
25日前
株式会社デンソー
運転支援装置
2か月前
Adora株式会社
アプリ使用制御システム
11日前
河村電器産業株式会社
警報装置
2か月前
トヨタ自動車株式会社
方法
2か月前
東亜電子工業株式会社
警報コントローラ
1か月前
能美防災株式会社
非常報知システム
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社 ミックウェア
情報処理装置、情報処理方法
2か月前
シャープ株式会社
駐車場管理装置
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ