TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083335
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2025014282,2022117648
出願日
2025-01-30,2022-07-25
発明の名称
ロボット駆動部用のカセット組立体
出願人
シーメンス ヘルシニアーズ エンドバスキュラー ロボティクス インコーポレイテッド
代理人
弁理士法人山口・竹本知的財産事務所
,
個人
,
個人
,
個人
主分類
A61B
34/35 20160101AFI20250523BHJP(医学または獣医学;衛生学)
要約
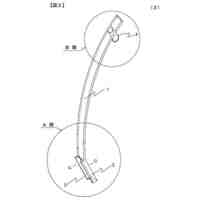
【課題】1つ又は複数の細長い医療デバイスを駆動するためのロボット駆動システムを提供する。
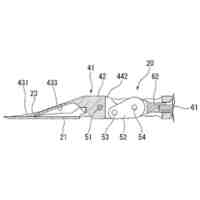
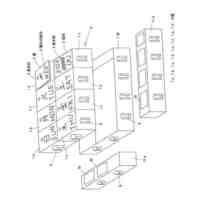
【解決手段】ロボット駆動システムはロボット駆動部と滅菌カセット組立体を含み、ロボット駆動部は、第1の駆動モジュールと、第1の駆動モジュールの近位側にある第2の駆動モジュールを含み、各駆動モジュールはロボット駆動部の長手方向軸に沿って独立して移動可能であり、滅菌カセット組立体は、第1のカセットと、第1のカセットに対して結合器を用いて結合される第2のカセットを含む。第1のカセットと第2のカセットは、それぞれ、第1の駆動モジュールと第2の駆動モジュールに対して、取外し可能に取付けられる。
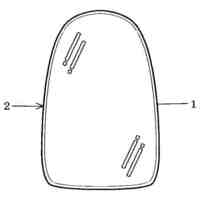
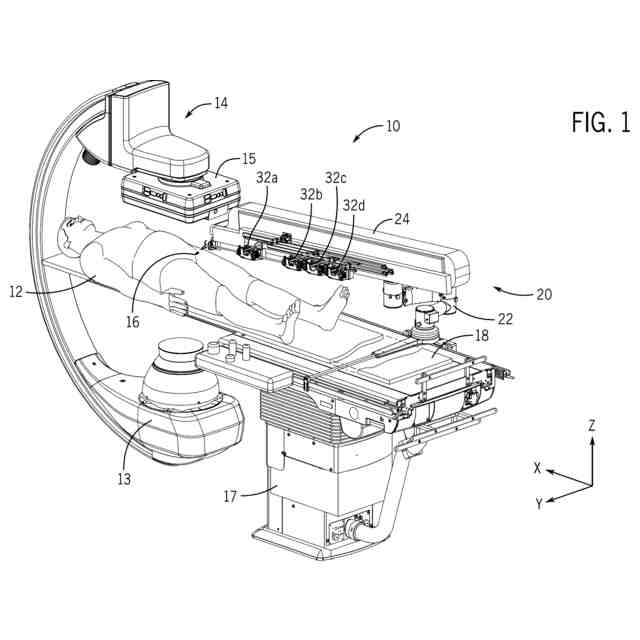
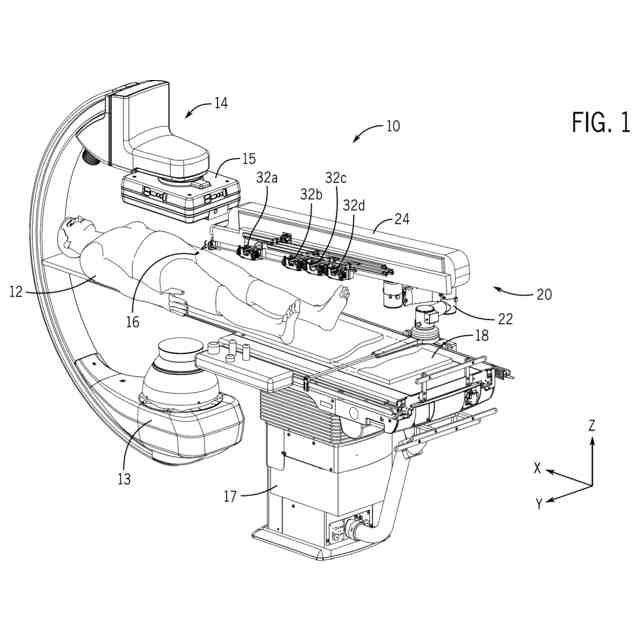
【選択図】図1
特許請求の範囲
【請求項1】
1つ又は複数の細長い医療デバイスを駆動するためのロボット駆動システムであって、
ロボット駆動部と、滅菌カセット組立体と、
を含み、
前記ロボット駆動部は、
第1の駆動モジュールと、
前記第1の駆動モジュールより近位にある第2の駆動モジュールと、
を含み、前記第1の駆動モジュールと前記第2の駆動モジュールは、それぞれ、前記ロボット駆動部の長手方向軸に沿って独立して移動可能であって、
前記滅菌カセット組立体は、
第1のカセットと、
前記第1のカセットに対して結合器を用いて結合される第2のカセットと、
を含み、前記第1のカセットと前記第2のカセットは、それぞれ、前記第1の駆動モジュールと前記第2の駆動モジュールに対して、取外し可能に取付けられる、
ロボット駆動システム。
続きを表示(約 1,300 文字)
【請求項2】
前記結合器は、前記第1のカセットに接続される第1のアームと、前記第2のカセットに接続される第2のアームとを含み、前記第2のアームは、前記第1のアームに対して摺動可能に接続される、請求項1に記載のロボット駆動システム。
【請求項3】
前記第1のアームと前記第2のアームの間では、それぞれの長手方向軸に沿ってのみ相対的な移動が可能となるように、前記第1のアームと前記第2のアームが結合される、請求項2に記載のロボット駆動システム。
【請求項4】
さらに、第1の遠位端と第1の近位端を有する第1の可撓性の支持体を備え、前記第1の遠位端は前記第1のカセットに対して取外し可能に固定され、前記第1の近位端は前記第1のアームの近位端に対して固定され、前記第1の可撓性の支持体の前記第1の遠位端と前記第1の近位端の間の部位が、前記第2のカセット内に配置される、請求項3に記載のロボット駆動システム。
【請求項5】
前記滅菌カセット組立体は、さらに、第3のカセットを含み、前記結合器は、さらに、前記第2のアームに対して摺動可能に接続される第3のアームを含み、前記第3のカセットは前記第3のアームに対して接続される、請求項3に記載のロボット駆動システム。
【請求項6】
前記第2のアームは、前記第1のアームと摺動可能に係合する第1の部分と、前記第3のアームと摺動可能に係合する第2の部分とを含む、請求項5に記載のロボット駆動システム。
【請求項7】
前記滅菌カセット組立体は、さらに、第4のカセットを含み、前記結合器は、さらに、前記第3のアームに対して摺動可能に接続される第4のアームを含み、前記第4のカセットは前記第4のアームに対して接続される、請求項5に記載のロボット駆動システム。
【請求項8】
さらに、第2の遠位端と第2の近位端を有する第2の可撓性の支持体を備え、前記第2の可撓性の支持体の前記第2の遠位端は、前記第2のカセットに対して取外し可能に固定され、前記第2の近位端は、前記第2のアームの近位端に対して固定され、前記第2の可撓性の支持体の前記第2の遠位端と前記第2の近位端の間の部位が、前記第3のカセット内に配置される、請求項5に記載のロボット駆動システム。
【請求項9】
さらに、先頭の遠位端と先頭の近位端を有する先頭の可撓性の支持体を備え、前記先頭の遠位端は、前記第1のカセットの遠位側のシースコネクタに対して取外し可能に固定され、前記先頭の近位端は、ロボット駆動ハウジングに対して固定され、前記先頭の可撓性の支持体の前記先頭の遠位端と前記先頭の近位端の間の部位が、前記第1のカセット内に配置される、請求項3に記載のロボット駆動システム。
【請求項10】
前記第1のアームは、前記ロボット駆動部のハウジング上の支持アンカーと前記遠位側のシースコネクタの間で、前記先頭の可撓性の支持体の部位を動作可能に案内する第1の案内部を備える、請求項9に記載のロボット駆動システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
「関連出願の相互参照」
本出願は、2021年7月30日に出願された米国仮出願第63/203,795号に基づく優先権を主張するものであり、その名称は、「ロボット駆動部用のカセット組立体(Cassette assembly for robotic drive)」であって、その出願の開示内容が、参照により本明細書に援用されている。
続きを表示(約 4,400 文字)
【0002】
本発明は、概して、ロボット式医療処置システムの分野に関し、特に、ロボット駆動部用のカセット組立体に関する。
【背景技術】
【0003】
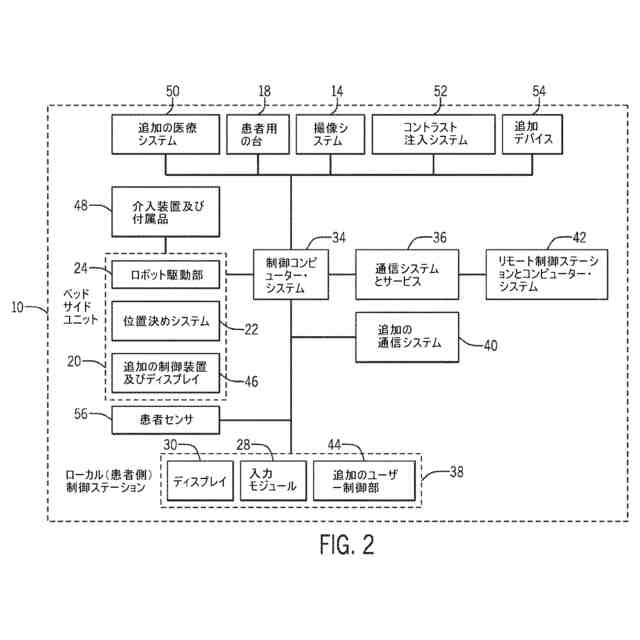
様々な血管系の疾患の診断及び治療を行う際、侵入を最小に抑えた医療処置のため、カテーテル及び他の細長い医療デバイス(EMD:elongated medical device(s))が用いられることがある。それら血管系の疾患として、例えば、神経血管介入処置(NVI:neurovascular interventional procedure)又は神経介入手術(neurointerventional surgery)として知られているもの、経皮的冠状介入(PCI:percutaneous coronary intervention)、また、周辺血管介入処置(PVI:peripheral vascular intervention procedure)等がある。これら処置では、典型的に、脈管構造を通ってガイド・ワイヤを案内させて、そのガイド・ワイヤを介してカテーテルを進行させて、治療を移送又は行うことがある。このようなカテーテル処置は、動脈又は静脈等の適切な血管内へのアクセスを得ることから開始されるが、その際、標準的な経皮的技法により、イントロデューサー・シース(introducer sheath)が用いられている。次に、そのイントロデューサー・シースを通って、シース又はガイド・カテーテルが、診断ガイド・ワイヤ上で、一次位置まで進められている。その位置は、例えば、NVIでは内頸動脈、PCIでは冠動脈口、PVIでは大腿動脈の表面等である。次に、脈管構造に適したガイド・ワイヤが、シース又はガイド・カテーテルを通って、脈管構造内のターゲット位置まで案内される。解剖学的構造が曲がりくねっている等の特定の状況下では、ガイド・ワイヤの案内を助けるため、サポート・カテーテル又はマイクロ・カテーテルが、ガイド・ワイヤ上に挿入されることがある。医者又は操作者は、撮像システム(例えば、透視鏡等)を用いて、コントラスト注入を伴って、画像(シネ)を得ることがあるが、それによって、固定フレームを選択して、ターゲット(例えば、病変)位置までガイド・ワイヤ又はカテーテルを案内するためのロードマップとして用いることがある。医者が、ガイド・ワイヤ又はカテーテルを移送する際、コントラストで強調された画像を得ることもでき、それによって、デバイス(装置)が、正しい経路に沿って、ターゲット位置まで移動しているか否かを確認することができる。医者は、(X線)透視法を用いて解剖学的構造を観察しながら、ガイド・ワイヤ又はカテーテルの近位端を操作して、その遠位端を、適切な導管内で、病変又はターゲットの解剖学的位置に配向させており、その際、遠位端が分岐する(側枝に進む)ことを回避している。
【0004】
ロボット式のカテーテル・ベースの処置システムは、カテーテル処置(例えば、NVI、PCI及びPVI等)を行う際に医者を助けるために開発されている。NVI処置の例には、動脈瘤のコイル塞栓形成、動静脈奇形の液体塞栓形成、及び急性虚血性脳卒中の状況における大血管閉塞の機械的血栓除去が含まれる。NVI処置では、医者はロボット・システムを用いて、神経血管ガイド・ワイヤやマイクロ・カテーテルの操作を制御して、ターゲットの病変へのアクセスを得て、治療を移送して、正常な血流を回復させている。ターゲットへのアクセスは、シース又はガイド・カテーテルによって可能にされている。しかし、より遠位の領域では、マイクロ・カテーテルやガイド・ワイヤの適当な支持を可能にするため、中間カテーテルが必要とされることもある。ガイド・ワイヤの遠位端は、病変の種類と治療に応じて、その病変の中に、又はそこを通って案内されることがある。また、複数の動脈瘤を治療するため、病変までマイクロ・カテーテルを進めて、ガイド・ワイヤを取外して、マイクロ・カテーテルを通して、複数の血栓コイルを動脈瘤内で展開させて、動脈瘤内への血流を遮断することがある。また、動静脈奇形を治療するためには、マイクロ・カテーテルを介して、液体塞栓が奇形部に注射されることがある。血管閉塞を治療するための機械的血栓術は、吸引及び/又はステント・レトリーバーの使用によって達成することができる。血栓の位置に応じて、吸引は、吸引カテーテルを通して行われるか、又はより小さな動脈の場合はマイクロ・カテーテルを通して行われる。吸引カテーテルが病変に到達したら、陰圧を適用して、カテーテルを通して凝固物(血栓)を除去することがある。あるいは、凝固物は、マイクロ・カテーテルを通して、ステント・レトリーバー(ステント回収器)を配置することで除去することがある。血栓がステント・レトリーバーと一体にされると、ステント・レトリーバー及びマイクロ・カテーテル(又は中間カテーテル)をガイド・カテーテル内に引き込むことによって血栓が回収される。
【0005】
PCIでは、医者はロボット・システムを使用して、病変のアクセスを得るため、冠状動脈ガイド・ワイヤを操作して、治療部を移送し、正常な血流を回復させることがある。このアクセスは、冠動脈口内にガイド・カテーテルを装着することで可能になる。ガイド・ワイヤの遠位端は、病変を通って案内されるが、解剖学的構造が複雑な場合、ガイド・ワイヤを適切に支持するため、マイクロ・カテーテルを使用することがある。病変にステント又はバルーンを送達して展開させることで、血流を復元させている。病変は、ステント装着前に、準備を必要とすることがあるが、例えば、病変の事前拡張のためにバルーンを送達するか、あるいは、アテレクトミーを行うことがあり、例えばレーザー又は回転式アテレクトミー・カテーテルとガイド・ワイヤ上のバルーンを用いることがある。画像カテーテル又は分数流リザーブ(FFR:fractional flow reserve)測定を使用することによって、適切な治療を決定するために、診断画像及び生理学的測定を行うこともある。
【0006】
PVIでは、医者は、治療を移送するためにロボット・システムを用いて、NVIと同様の技術によって、血流を回復させている。ガイド・ワイヤの遠位端は、病変を通って案内されて、マイクロ・カテーテルを用いて、複雑な解剖学的構造に対するガイド・ワイヤの適切な支持を提供することがある。血流は、ステント又はバルーンを病変に送達して展開することによって復元され得る。PCIと同様に、病変の準備と画像診断も同様に使用することができる。
【0007】
カテーテル又はガイド・ワイヤの遠位端での支持が求められる場合、例えば、曲がりくねった血管系又は石灰化した血管系を案内して、遠位の解剖学的位置に到達させたり、又は硬い病変を横切らせるためには、オーバー・ザ・ワイヤ(OTW:over-the-wire)カテーテル又は同軸システムが使用されることがある。ガイド・ワイヤがカテーテルの全長にわたって延出させるため、OTWカテーテルは、ルーメン(空洞又は内腔)を有する。これにより、ガイド・ワイヤが全長に沿って支持されるので、比較的安定したシステムが得られる。しかしながら、このシステムには、幾つかの欠点がある。例えば、急速又は迅速な交換式カテーテルと比較して、摩擦が高く、全長が長くなる(下記参照)。典型的には、内在(留置)するガイド・ワイヤの位置を維持しながら、OTWカテーテルを取外したり、交換したりするためには、ガイド・ワイヤの露出した長さ(患者の外側)をOTWカテーテルよりも長くしなければならない。例えば、長さが300cmのガイド・ワイヤでは、通常、この目的に十分である。これは、交換長ガイド・ワイヤと呼ばれることがある。しかし、このガイド・ワイヤの長さのため、OTWカテーテルの取外しや、交換には、2人の操作者が必要となる。このことは、3軸システムとして当該技術分野で知られている3重同軸(triple coaxial)の場合(4重同軸カテーテルの使用も知られている)、さらに困難になる。しかしながら、OTWシステムは、その安定性のため、NVIやPVIの処置ではしばしば使用されている。他方、PCI処置では、迅速交換(又はモノレール/単軌)カテーテルがしばしば使用されている。迅速交換カテーテル中のガイド・ワイヤ・ルーメンは、カテーテルの遠位部分のみで通り、それは、モノレール又は迅速交換(RX:rapid exchange)部とも呼ばれている。RXシステムを用いる場合、操作者は、互いに平行な介入デバイスを操作し(OTWシステムでは、直列的な構成でデバイスが操作される場合とは対照的に)、ガイド・ワイヤの露出長さは、カテーテルのRX部よりもわずかに長くするだけでよい。迅速交換ガイド・ワイヤの長さは、通常、180cm-200cmである。より短い長さのガイド・ワイヤとモノレールが用いられる場合には、RXカテーテルは、1人の操作者で交換することができる。しかしながら、より遠位での支持が必要とされる場合、RXカテーテルは、しばしば不適合である。
【発明の概要】
【課題を解決するための手段】
【0008】
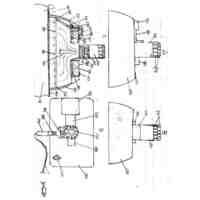
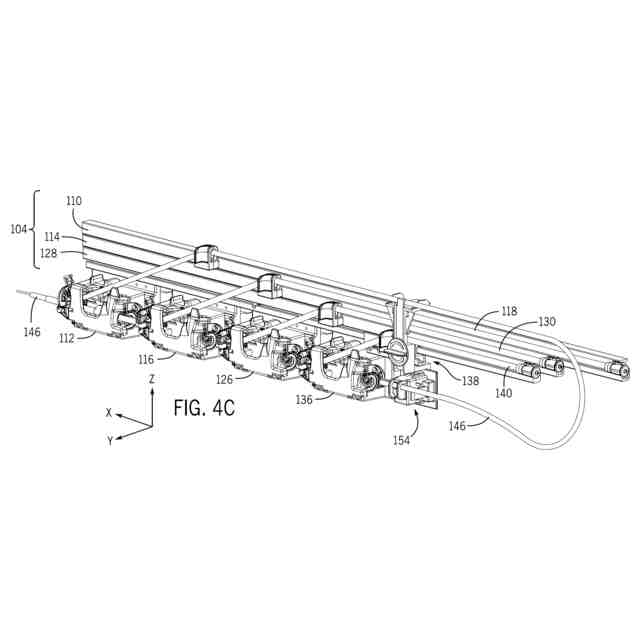
本発明に係る一態様では、1つ又は複数の細長い医療デバイス(EMD)を駆動するためのロボット駆動システムを提供する。ロボット駆動システムは、ロボット駆動部と、滅菌カセット組立体と、を含む。ロボット駆動部は、第1の駆動モジュールと、第1の駆動モジュールより近位にある第2の駆動モジュールと、を含む。駆動モジュール(第1の駆動モジュールと第2の駆動モジュール)は、それぞれ、ロボット駆動部の長手方向軸に沿って独立して移動可能である。滅菌カセット組立体は、第1のカセットと、第1のカセットに対して結合器を用いて(結合器を介して)結合される第2のカセットと、を含む。第1のカセットと第2のカセットは、それぞれ、第1の駆動モジュールと第2の駆動モジュールに対して、取外し可能にともに取付けられる。
【0009】
一態様では、結合器は、第1のカセットに接続される第1のアームと、第2のカセットに接続される第2のアームとを含み、第2のアームは、第1のアームに対して摺動可能に接続される。
【0010】
一態様では、第1のアームと第2のアームの間では、それぞれの長手方向軸に沿ってのみ相対的な移動が可能となるように、第1のアームと第2のアームが結合される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
3か月前
個人
鼾防止用具
3か月前
個人
歯の掃除具
6か月前
個人
歯茎みが品
4か月前
個人
マッサージ機
3か月前
個人
導電香
4か月前
個人
洗井間専家。
2か月前
個人
身体牽引装置
7か月前
個人
白内障治療法
2か月前
個人
脈波測定方法
3か月前
個人
乗馬テラピー
7か月前
個人
脈波測定方法
3か月前
個人
塗り薬塗り具
5か月前
個人
健康器具
5か月前
個人
矯正椅子
5日前
個人
発熱器具
6か月前
個人
ホバーアイロン
1か月前
個人
収納容器
5か月前
個人
クリップ
4か月前
個人
片足歩行支援具
4か月前
個人
染毛方法
6か月前
個人
口内洗浄具
3か月前
個人
歯の保護用シール
5日前
個人
磁器治療器
7か月前
個人
眼科診療車
4か月前
個人
シャンプー
1か月前
個人
動体視力強化装置
7か月前
三生医薬株式会社
錠剤
2か月前
個人
車椅子持ち上げ器
2か月前
東レ株式会社
下肢着用具
7か月前
株式会社ナカニシ
生検針
7か月前
株式会社八光
剥離吸引管
今日
個人
服薬支援装置
2か月前
株式会社コーセー
化粧料
4か月前
株式会社コーセー
美爪料
4か月前
株式会社結心
手袋
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ