TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083329
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2024201975
出願日
2024-11-20
発明の名称
内視鏡スコープの制御のためのトルク生成方法、プログラム及び装置
出願人
メディンテック インコーポレイテッド
,
MEDINTECH INC.
代理人
弁理士法人IPX
主分類
A61B
1/005 20060101AFI20250523BHJP(医学または獣医学;衛生学)
要約
【課題】使用者が望む位置及び速度でスコープが移動することができるように、内視鏡装置で発生するトルクを補償する方法、コンピュータプログラム及び装置に関する。
【解決手段】本開示の一実施例によって少なくとも一つのプロセッサを含むコンピューティング装置によって行われる内視鏡スコープの制御のためのトルク生成方法が開示される。前記方法は、前記内視鏡装置に含まれたスコープの目標動き状態についての第1データ及び前記スコープの推定動き状態についての第2データを獲得する段階と、前記第1データ及び第2データを入力変数とする数学的モデルを用いて、前記スコープが使用者の所望の位置及び速度を追従するようにするためのトルクを算出する段階と、を含むことができる。
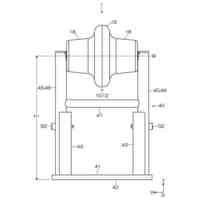
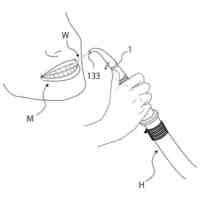
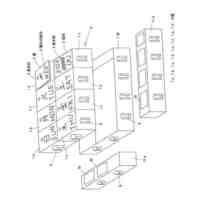
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも一つのプロセッサを含むコンピューティング装置によって行われる、内視鏡スコープの制御のためのトルク生成方法であって、
内視鏡装置に含まれたスコープの目標動き状態についての第1データ及び前記スコープの推定動き状態についての第2データを獲得する段階と、
前記第1データ及び第2データを入力変数とする数学的モデルを用いて、前記スコープが使用者の所望の位置及び速度を追従するようにするためのトルクを算出する段階と、
を含む、方法。
続きを表示(約 1,400 文字)
【請求項2】
前記スコープの目標動き状態は、前記内視鏡装置に含まれた操作部を用いた命令によって算出される、前記スコープの目標位置、前記スコープの目標速度又は前記スコープの目標加速度のうちの少なくとも一つを含む、請求項1に記載の方法。
【請求項3】
前記スコープの推定動き状態は、センサーによって測定される前記内視鏡装置に含まれたモーターの実際位置データ、前記センサーによって測定される前記モーターの実際速度データ、及び前記第1データに含まれた前記スコープの目標速度データに基づいて算出される、前記スコープの推定位置、前記スコープの推定速度又は前記スコープの推定加速度のうちの少なくとも一つを含む、請求項1に記載の方法。
【請求項4】
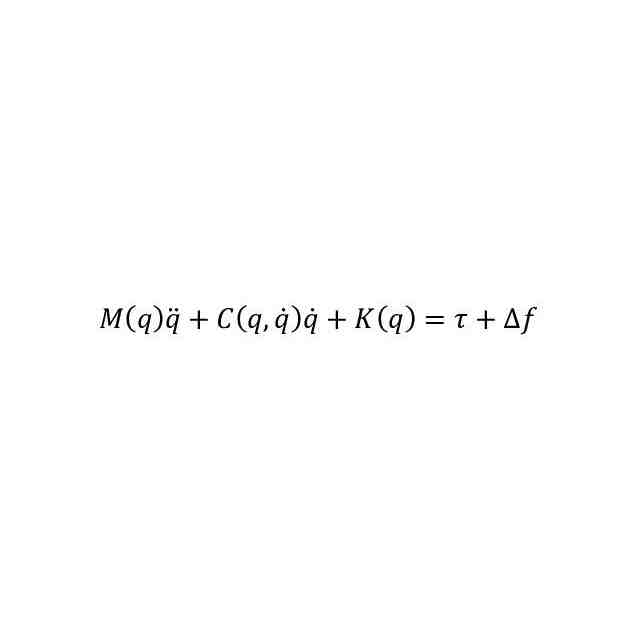
前記数学的モデルは、スライディングモードコントロール(sliding mode control)に基づく力学(dynamics)項の組合せで構成される、請求項1に記載の方法。
【請求項5】
前記力学項は、
前記第2データに含まれた前記スコープの推定位置を入力変数とする、慣性に対する第1項と、
前記スコープの推定位置及び前記第2データに含まれた前記スコープの推定速度を入力変数とする、コリオリ効果(Coriolis effect)に対する第2項と、
前記スコープの推定位置を入力変数とする、前記スコープの形状による力に対する第3項と、
を含む、請求項4に記載の方法。
【請求項6】
前記力学項の組合せは、前記第1項、前記第2項及び前記第3項の和を含む基本数式と半定符号(semidefinite)形態のリアプノフ(lyapunov)関数とを組み合わせて算出されたものである、請求項5に記載の方法。
【請求項7】
前記リアプノフ関数は、前記スコープのストリング(string)によって発生するスプリング(spring)効果を反映するための詳細項を含む、請求項6に記載の方法。
【請求項8】
前記リアプノフ関数は、前記第2データと前記第1データとの間の差を入力変数とするスライディング表面に対する数式が反映されて半定符号形態に作られるものである、請求項6に記載の方法。
【請求項9】
前記リアプノフ関数は、外乱による不確実性の最大値を補償するための符号関数に基づく数式及び前記最大値を補償する過程で発生し得る追従エラーを減少させるための数式が反映されて半定符号形態に作られるものである、請求項8に記載の方法。
【請求項10】
コンピュータ可読の保存媒体に保存されたコンピュータプログラム(program)であって、前記コンピュータプログラムは一つ以上のプロセッサ(processor)で実行される場合、内視鏡スコープの制御のためのトルクを生成するための動作を実行するようにし、前記動作は、
内視鏡装置に含まれたスコープの目標動き状態についての第1データ及び前記スコープの推定動き状態についての第2データを獲得する動作と、
前記第1データ及び第2データを入力変数とする数学的モデルを用いて、前記スコープが使用者の所望の位置及び速度を追従するようにするためのトルクを算出する動作と、
を含む、コンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は内視鏡制御技術に関し、具体的には、内視鏡スコープの制御に必要なトルクを生成する方法、コンピュータプログラム及び装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
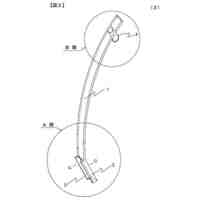
内視鏡は施術を行うか又は剖検せずにスコープを身体に挿入して臓器を観察する医療器具を通称する。内視鏡は、人体の内部にスコープを挿入し、光を照射して、内壁の表面で反射された光を可視化する。目的及び身体部位によって内視鏡の種類が区分され、大別して、内視鏡管が金属で形成された硬性内視鏡(Rigid Endoscope)と、消化器内視鏡として代表されるフレキシブル内視鏡(flexible endoscope)とに区分されることができる。
【0003】
フレキシブル内視鏡装置は内部に多様な装置を含むので衝撃に弱く、フレキシブル内視鏡が挿入される消化器の内部も非常に軟弱な組職であり、非定型の形態を有する。また、患者によって消化器の内部の形態が異なるので、経験が多い医療陣と言っても内視鏡挿入の過程が容易でないことがある。
【0004】
ここで、内視鏡施術が行われるのに伴って、内視鏡スコープは消化器の形状によって撚られるかねじれながら消化器の内部に挿入される。施術の初期には、スコープの形態が比較的単純なので、施術者は大きな力を入れないでスコープを所望の角度に湾曲させるか又は動かすことができる。しかし、施術の後期に行くほど又は施術中間に複雑な動きを伴う場合、時々刻々変形されるスコープの特性を考慮しながらスコープを制御することは施術者に大きな操作の不便さを引き起こすことがある。
【0005】
また、身体の内部に挿入される内視鏡施術の特性の上、スコープの纎細な制御が要求されるので、施術状況で内視鏡装置で発生する物理的な変化を反映してスコープを制御するための技術が要求される。
【先行技術文献】
【特許文献】
【0006】
韓国特許第10-1940046号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本開示は前述した従来技術の問題点を解決するためのものであり、使用者が望む位置及び速度でスコープが移動することができるように、内視鏡装置で発生するトルクを補償する方法、コンピュータプログラム及び装置に関する。
【0008】
ただ、本実施例が達成しようとする技術的課題は前述したような技術的課題に限定されず、他の技術的課題が存在し得る。
【課題を解決するための手段】
【0009】
前述したような課題を実現するための本開示の一実施例によって、内視鏡スコープの制御のためのトルク生成方法が開示される。前記方法は、前記内視鏡装置に含まれたスコープの目標動き状態についての第1データ及び前記スコープの推定動き状態についての第2データを獲得する段階と、前記第1データ及び第2データを入力変数とする数学的モデルを用いて、前記スコープが使用者の所望の位置及び速度を追従するようにするためのトルクを算出する段階と、を含むことができる。
【0010】
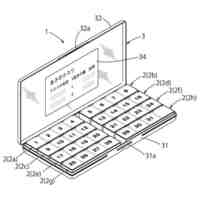
代案として、前記スコープの目標動き状態は、前記内視鏡装置に含まれた操作部を用いた命令によって算出される、前記スコープの目標位置、前記スコープの目標速度又は前記スコープの目標加速度のうちの少なくとも一つを含むことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
3か月前
個人
歯の掃除具
6か月前
個人
歯茎みが品
4か月前
個人
鼾防止用具
3か月前
個人
身体牽引装置
7か月前
個人
白内障治療法
2か月前
個人
塗り薬塗り具
5か月前
個人
導電香
4か月前
個人
マッサージ機
3か月前
個人
洗井間専家。
2か月前
個人
脈波測定方法
3か月前
個人
脈波測定方法
3か月前
個人
乗馬テラピー
7か月前
個人
矯正椅子
5日前
個人
収納容器
5か月前
個人
ホバーアイロン
1か月前
個人
健康器具
5か月前
個人
染毛方法
6か月前
個人
片足歩行支援具
4か月前
個人
クリップ
4か月前
個人
発熱器具
6か月前
個人
車椅子持ち上げ器
2か月前
個人
眼科診療車
4か月前
個人
動体視力強化装置
7か月前
個人
口内洗浄具
3か月前
個人
シャンプー
1か月前
三生医薬株式会社
錠剤
2か月前
個人
磁器治療器
7か月前
個人
歯の保護用シール
5日前
株式会社結心
手袋
2か月前
株式会社八光
剥離吸引管
今日
個人
除菌システム
4か月前
株式会社ナカニシ
生検針
7か月前
株式会社コーセー
化粧料
4か月前
個人
服薬支援装置
2か月前
東レ株式会社
吸収制御剤
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ