TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082991
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196596
出願日
2023-11-20
発明の名称
撮影方法、外観検査方法、制御装置、および、撮影システム
出願人
セイコーエプソン株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B25J
13/08 20060101AFI20250523BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットがワークを把持した状態で、ワークの所望の部位を効率的に撮影する。
【解決手段】ワークを撮影する撮影方法は、(b)把持しているワークがいずれかの撮影姿勢となるようにワークの位置および姿勢の少なくとも一方をロボットに調整させるステップと、(c)いずれかの撮影姿勢とされたワークの対象部位をカメラに撮影させるステップと、(d)ロボットがワークを把持し直すことなく未撮影の対象部位を撮影できる場合、新たな撮影姿勢でステップ(b)およびステップ(c)を実行するステップと、(e)ロボットがワークを把持したまま未撮影の対象部位を撮影できる他の撮影姿勢をワークが取り得ない場合、撮影姿勢情報とそれまでにステップ(c)が実行された撮影姿勢とに基づいて、新たな把持部位および把持姿勢で把持し直すようにロボットを制御し、新たな撮影姿勢でステップ(b)およびステップ(c)を実行するステップと、を含む。
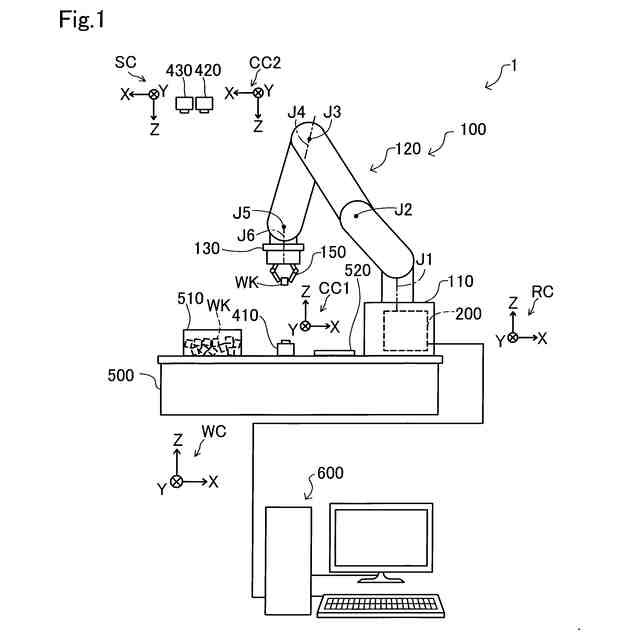
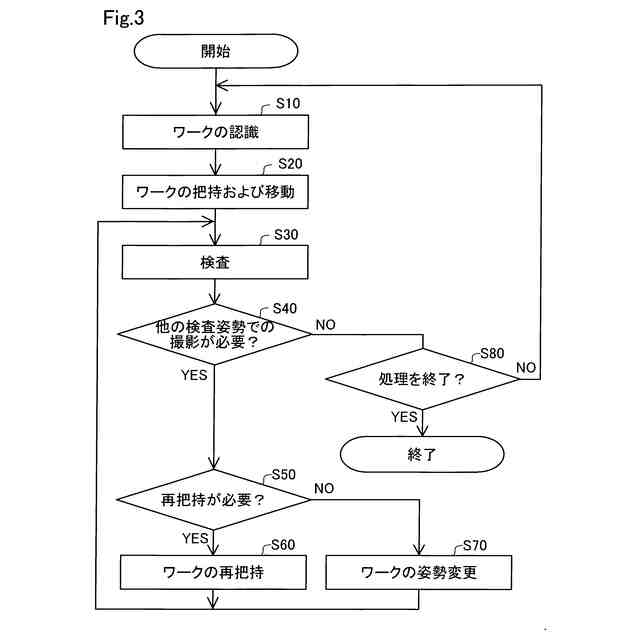
【選択図】図1
特許請求の範囲
【請求項1】
ワークを撮影する撮影方法であって、
(a)ロボットに前記ワークを把持させるステップと、
(b)把持している前記ワークの姿勢が、前記ワークのうちの撮影対象とする複数の対象部位を撮影し得るあらかじめ定められた複数の撮影姿勢のうちの、いずれかの撮影姿勢となるように、カメラに対する前記ワークの位置および姿勢の少なくとも一方を前記ロボットに調整させるステップと、
(c)前記ロボットに把持されて前記いずれかの撮影姿勢とされた前記ワークの前記対象部位を前記カメラに撮影させるステップと、
(d)前記ロボットが前記ワークを把持し直すことなく、未撮影の前記対象部位を撮影することができる撮影姿勢であって、それまでに前記ステップ(c)が実行された前記撮影姿勢とは異なる他の撮影姿勢を前記ワークが取り得る場合、
前記他の撮影姿勢を新たな撮影姿勢として前記ステップ(b)および前記ステップ(c)を実行するステップと、
(e)前記ロボットが前記ワークを把持したままで前記ワークの前記位置および姿勢を変更したとしても、未撮影の前記対象部位を撮影することができる前記他の撮影姿勢を前記ワークが取り得ない場合、
前記ロボットが前記ワークを把持する把持部位および前記ロボットの前記ワークに対する把持姿勢と、前記対象部位を撮影可能な前記撮影姿勢と、を対応付けた撮影姿勢情報と、それまでに前記ステップ(c)が実行された前記撮影姿勢と、に基づいて特定された新たな把持部位および把持姿勢で把持し直すように前記ロボットを制御し、前記他の撮影姿勢を前記新たな撮影姿勢として前記ステップ(b)および前記ステップ(c)を実行するステップと、
を含む撮影方法。
続きを表示(約 2,600 文字)
【請求項2】
請求項1に記載の撮影方法であって、
前記ステップ(e)において、
前記撮影姿勢情報に基づいて、未撮影の前記対象部位のうち最も多くの前記対象部位を撮影し得る前記撮影姿勢における前記把持部位および把持姿勢が特定される、
撮影方法。
【請求項3】
請求項1に記載の撮影方法であって、
(f)前記ステップ(a)の前に実行されるステップであって、
前記カメラとは異なる第2カメラに、前記ロボットが把持していない状態の複数の前記ワークを撮影させ、
前記第2カメラにより取得された複数の前記ワークの画像に基づいて、複数の前記ワークのうち少なくとも前記ロボットが把持する対象として特定された前記ワークの位置および姿勢を推定し、
特定された前記ワークについて推定された前記位置および姿勢に基づいて、前記ロボットが前記ワークを把持することができる前記ワークの少なくとも1つの前記把持部位および把持姿勢を特定し、
前記ロボットに、特定された前記ワークを前記把持部位および把持姿勢で把持させる、
ステップをさらに含む、
撮影方法。
【請求項4】
請求項3に記載の撮影方法であって、
前記ステップ(f)において、
特定された前記ワークについて、推定した前記位置および姿勢と、前記撮影姿勢情報とに基づいて、前記あらかじめ定められた複数の撮影姿勢のうち最も多くの前記撮影姿勢において前記ワークを撮影できる前記把持部位および把持姿勢が特定される、
撮影方法。
【請求項5】
請求項1に記載の撮影方法であって、
前記撮影姿勢情報において、前記対象部位が前記ロボットの把持により遮蔽されないか否かに基づいて、前記対象部位を撮影可能な前記撮影姿勢に対応する前記把持部位および把持姿勢であるか否かが設定されている、
撮影方法。
【請求項6】
請求項1に記載の撮影方法であって、
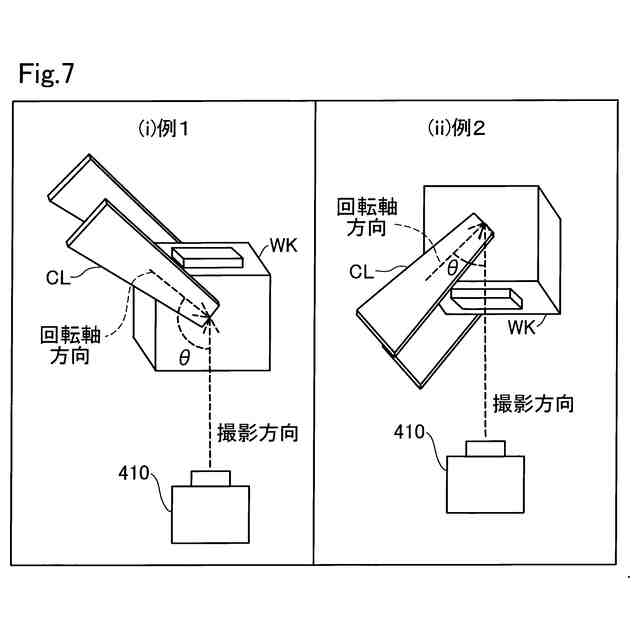
前記撮影姿勢情報において、前記ロボットに装備されたグリッパーの回転軸方向と、前記ワークを撮影する前記カメラの撮影方向と、のなす角度が90度以上であるか否かに基づいて、前記対象部位を撮影可能な前記撮影姿勢に対応する前記把持部位および把持姿勢であるか否かが設定されている、
撮影方法。
【請求項7】
請求項1に記載の撮影方法であって、
前記撮影姿勢情報において、前記ロボットに把持された前記ワークが前記カメラの撮影範囲に到達できるか否かに基づいて、前記対象部位を撮影可能な前記撮影姿勢に対応する前記把持部位および把持姿勢であるか否が設定されている、
撮影方法。
【請求項8】
請求項1から7のいずれか一項に記載の撮影方法を用いた外観検査方法であって、
前記ロボットに把持されて前記いずれかの撮影姿勢とされた前記ワークを前記カメラが撮影することにより取得された画像を用いて、前記ワークの外観検査を行う、
外観検査方法。
【請求項9】
ロボットの動作を制御する制御装置であって、
ワークの姿勢が、前記ワークのうちの撮影対象とする複数の対象部位を撮影し得るあらかじめ定められた複数の撮影姿勢のうちの、いずれかの撮影姿勢となるように、前記ワークを把持した前記ロボットが、カメラに対する前記ワークの位置および姿勢の少なくとも一方を調整した状態で、前記カメラによりいずれかの前記対象部位が1回以上撮影された後に、
(i)前記ロボットが前記ワークを把持し直すことなく、未撮影の前記対象部位を撮影することができる撮影姿勢であって、それまでに撮影が行われた撮影姿勢とは異なる他の撮影姿勢を前記ワークが取り得る場合、
前記他の撮影姿勢を新たな撮影姿勢として、前記カメラに対する前記ワークの前記位置および姿勢を変更するように、前記ロボットを制御するステップと、
(ii)前記ロボットが前記ワークを把持したままで前記ワークの前記位置および姿勢を変更したとしても、未撮影の前記対象部位を撮影することができる前記他の撮影姿勢を前記ワークが取り得ない場合、
前記ロボットが前記ワークを把持する把持部位および前記ロボットの前記ワークに対する把持姿勢と、前記対象部位を撮影可能な前記撮影姿勢と、を対応付けた撮影姿勢情報と、それまでに撮影が行われた前記撮影姿勢と、に基づいて特定された新たな把持部位および把持姿勢で把持し直すように前記ロボットを制御するステップと、
のうち少なくとも一方を実行する、
制御装置。
【請求項10】
カメラと制御装置とを有する撮影システムであって、
前記制御装置は、
ロボットの動作を制御するロボット制御部であって、ワークを把持したままあらかじめ定められた複数の撮影姿勢のうちのいずれかの撮影姿勢となるように、前記ワークの位置および姿勢の少なくとも一方を前記ロボットに調整させる、ロボット制御部と、
前記ロボットに把持された状態で前記いずれかの撮影姿勢とされた前記ワークを撮影するように前記カメラの撮影動作を制御するカメラ制御部と、
を備え、
前記ロボットが前記ワークを把持し直すことなく、未撮影の対象部位を撮影できる場合には、
前記ロボットによる前記ワークの前記位置および姿勢の変更および前記カメラによる前記ワークの撮影について、前記ロボット制御部および前記カメラ制御部による各制御が繰り返され、
前記ロボットが前記ワークを把持したままで前記ワークの前記位置および姿勢を変更したとしても、未撮影の前記対象部位を撮影できない場合には、
前記ロボット制御部が、
前記ロボットが前記ワークを把持する把持部位および前記ロボットの前記ワークに対する把持姿勢と、前記対象部位を撮影可能な前記撮影姿勢と、を対応付けた撮影姿勢情報と、それまでに撮影が行われた前記撮影姿勢と、に基づいて特定された新たな把持部位および把持姿勢で前記ワークを把持し直すように、前記ロボットを制御し、
前記カメラ制御部が、前記ワークの前記対象部位を撮影するように、前記カメラを制御する、
撮影システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、撮影方法、外観検査方法、制御装置、および、撮影システムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1に記載の技術においては、ロボットがワークを把持した状態で、ワークを撮影して検査に用いる映像情報を取得する。
【先行技術文献】
【特許文献】
【0003】
特開平5-212690号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術においては、ロボットがワークを把持した部分がロボットの把持部に隠されてしまうため、当該部分を撮影することができない。このため、ロボットがワークを把持した状態でワークを撮影する場合に、所望の範囲を効率的に撮影できる技術が望まれていた。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の第1形態によれば、ワークを撮影する撮影方法が提供される。この撮影方法は、ワークを撮影する撮影方法であって、(a)ロボットに前記ワークを把持させるステップと、(b)把持している前記ワークの姿勢が、前記ワークのうちの撮影対象とする複数の対象部位を撮影し得るあらかじめ定められた複数の撮影姿勢のうちの、いずれかの撮影姿勢となるように、カメラに対する前記ワークの位置および姿勢の少なくとも一方を前記ロボットに調整させるステップと、(c)前記ロボットに把持されて前記いずれかの撮影姿勢とされた前記ワークの前記対象部位を前記カメラに撮影させるステップと、(d)前記ロボットが前記ワークを把持し直すことなく、未撮影の前記対象部位を撮影することができる撮影姿勢であって、それまでに前記ステップ(c)が実行された前記撮影姿勢とは異なる他の撮影姿勢を前記ワークが取り得る場合、前記他の撮影姿勢を新たな撮影姿勢として前記ステップ(b)および前記ステップ(c)を実行するステップと、(e)前記ロボットが前記ワークを把持したままで前記ワークの前記位置および姿勢を変更したとしても、未撮影の前記対象部位を撮影することができる前記他の撮影姿勢を前記ワークが取り得ない場合、前記ロボットが前記ワークを把持する把持部位および前記ロボットの前記ワークに対する把持姿勢と、前記対象部位を撮影可能な前記撮影姿勢と、を対応付けた撮影姿勢情報と、それまでに前記ステップ(c)が実行された前記撮影姿勢と、に基づいて特定された新たな把持部位および把持姿勢で把持し直すように前記ロボットを制御し、前記他の撮影姿勢を前記新たな撮影姿勢として前記ステップ(b)および前記ステップ(c)を実行するステップと、を含む。
【0007】
本開示の第2形態によれば、ロボットの動作を制御する制御装置が提供される。この制御装置は、ワークの姿勢が、前記ワークのうちの撮影対象とする複数の対象部位を撮影し得るあらかじめ定められた複数の撮影姿勢のうちの、いずれかの撮影姿勢となるように、前記ワークを把持した前記ロボットが、カメラに対する前記ワークの位置および姿勢の少なくとも一方を調整した状態で、前記カメラによりいずれかの前記対象部位が1回以上撮影された後に、(i)前記ロボットが前記ワークを把持し直すことなく、未撮影の前記対象部位を撮影することができる撮影姿勢であって、それまでに撮影が行われた撮影姿勢とは異なる他の撮影姿勢を前記ワークが取り得る場合、前記他の撮影姿勢を新たな撮影姿勢として、前記カメラに対する前記ワークの前記位置および姿勢を変更するように、前記ロボットを制御するステップと、(ii)前記ロボットが前記ワークを把持したままで前記ワークの前記位置および姿勢を変更したとしても、未撮影の前記対象部位を撮影することができる前記他の撮影姿勢を前記ワークが取り得ない場合、前記ロボットが前記ワークを把持する把持部位および前記ロボットの前記ワークに対する把持姿勢と、前記対象部位を撮影可能な前記撮影姿勢と、を対応付けた撮影姿勢情報と、それまでに撮影が行われた前記撮影姿勢と、に基づいて特定された新たな把持部位および把持姿勢で把持し直すように前記ロボットを制御するステップと、のうち少なくとも一方を実行する。
【0008】
本開示の第3形態によれば、カメラと制御装置とを有する撮影システムが提供される。この撮影システムにおいて、前記制御装置は、ロボットの動作を制御するロボット制御部であって、ワークを把持したままあらかじめ定められた複数の撮影姿勢のうちのいずれかの撮影姿勢となるように、前記ワークの位置および姿勢の少なくとも一方を前記ロボットに調整させる、ロボット制御部と、前記ロボットに把持された状態で前記いずれかの撮影姿勢とされた前記ワークを撮影するように前記カメラの撮影動作を制御するカメラ制御部と、を備え、前記ロボットが前記ワークを把持し直すことなく、未撮影の対象部位を撮影できる場合には、前記ロボットによる前記ワークの前記位置および姿勢の変更および前記カメラによる前記ワークの撮影について、前記ロボット制御部および前記カメラ制御部による各制御が繰り返され、前記ロボットが前記ワークを把持したままで前記ワークの前記位置および姿勢を変更したとしても、未撮影の前記対象部位を撮影できない場合には、前記ロボット制御部が、前記ロボットが前記ワークを把持する把持部位および前記ロボットの前記ワークに対する把持姿勢と、前記対象部位を撮影可能な前記撮影姿勢と、を対応付けた撮影姿勢情報と、それまでに撮影が行われた前記撮影姿勢と、に基づいて特定された新たな把持部位および把持姿勢で前記ワークを把持し直すように、前記ロボットを制御し、前記カメラ制御部が、前記ワークの前記対象部位を撮影するように、前記カメラを制御する。
【図面の簡単な説明】
【0009】
本実施形態にかかるロボットシステムの概略構成を示す説明図である。
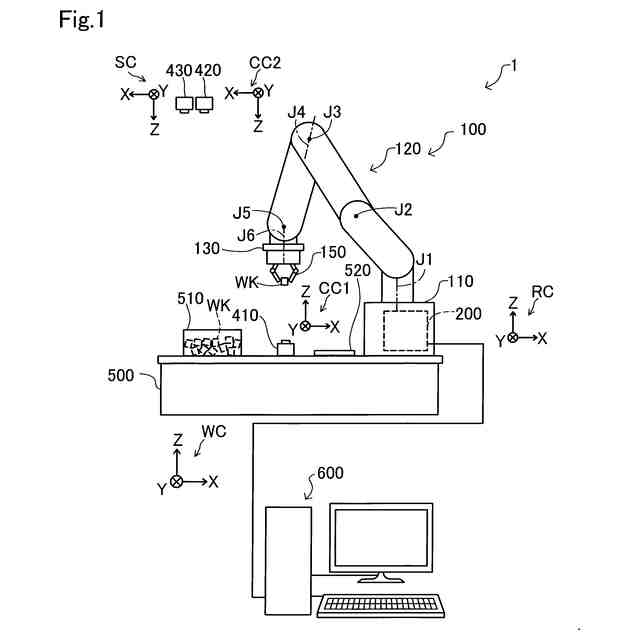
情報処理装置の機能を示すブロック図である。
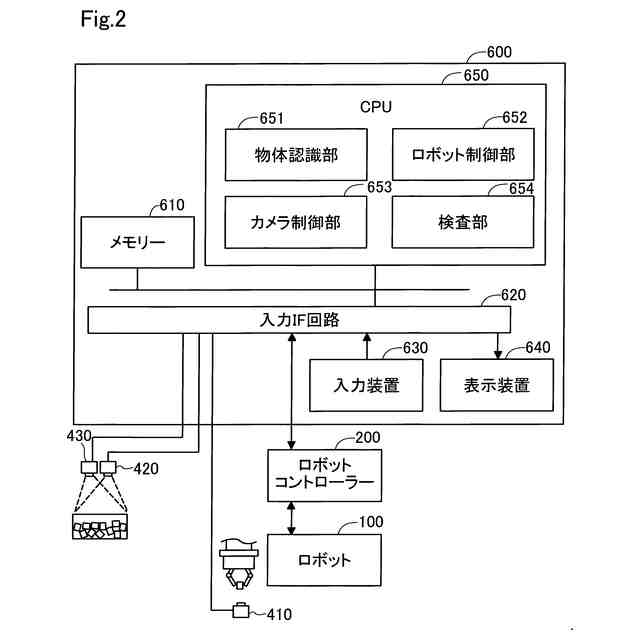
ワークの外観検査のために情報処理装置が実行する処理のフローチャートである。
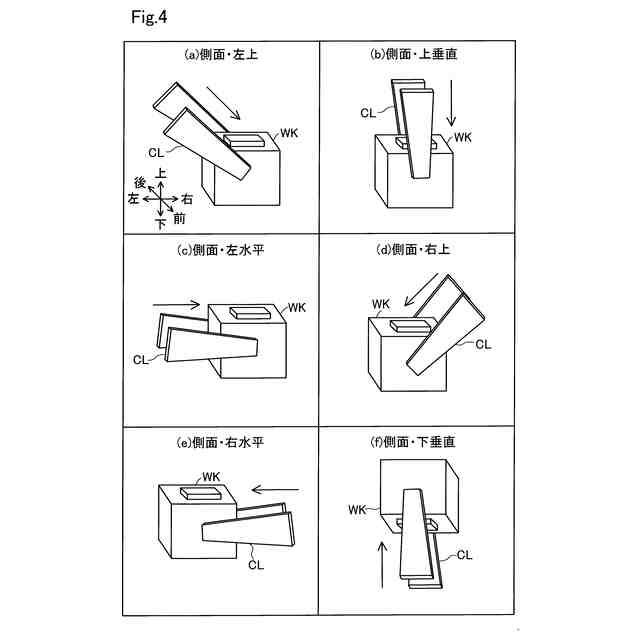
把持姿勢についての説明図である。
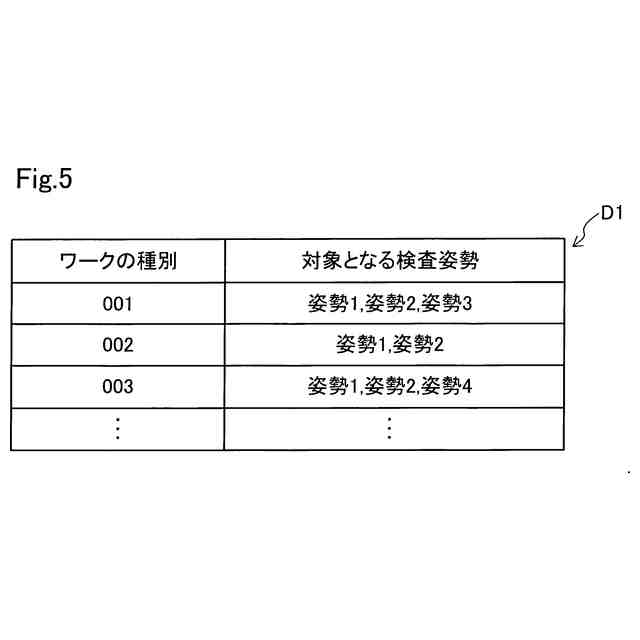
撮影姿勢情報D1を示す説明図である。
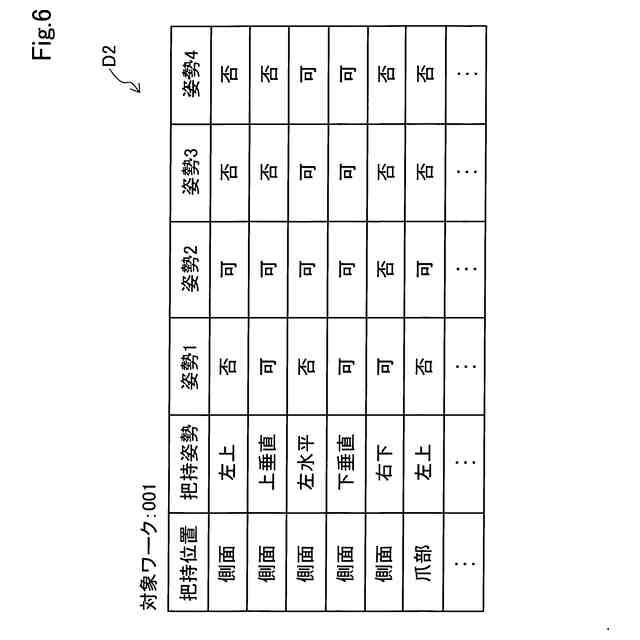
検査可否情報D2を示す説明図である。
グリッパーの回転軸方向とカメラの撮影方向とがなす角度についての説明図である。
【発明を実施するための形態】
【0010】
A.実施形態:
図1は、本実施形態にかかるロボットシステム1の概略構成を示す説明図である。ロボットシステム1は、ロボットが把持した状態のワークを撮影する。ロボットシステム1は、6軸ロボットであるロボット100と、ロボットコントローラー200と、第1カメラ410と、第2カメラ420と、深度センサー430と、作業台500と、情報処理装置600とを備える。第1カメラ410を「カメラ」ともよぶ。情報処理装置600を「制御装置」ともよぶ。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
日東精工株式会社
電動ドライバ
今日
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
株式会社ダイヘン
移動体
3日前
トヨタ自動車株式会社
関節機構
5日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
14日前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
5日前
個人
バール
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社PILLAR
チューブ保持治具
10日前
住友重機械工業株式会社
ロボット
25日前
川崎重工業株式会社
制動システム
1か月前
株式会社アイエイアイ
グリッパー
20日前
庄内機械株式会社
釘打装置
18日前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
13日前
株式会社リコー
多関節ロボット
4日前
芝浦機械株式会社
双腕ロボット
24日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社マキタ
電動作業機
6日前
トヨタ自動車東日本株式会社
搬送治具
18日前
株式会社マキタ
電動作業機
6日前
トヨタ自動車株式会社
荷姿影響緩和方法
21日前
株式会社ダイヘン
ロボット制御システム
3日前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
個人
回転移動式工具ホルダ
12日前
株式会社マキタ
電動工具
18日前
学校法人法政大学
装着型アシスト装置
1か月前
アピュアン株式会社
エアー式衝撃工具
1か月前
住友重機械工業株式会社
ロボット及びカバー
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































