TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081142
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194709
出願日
2023-11-15
発明の名称
ロボット軌道計測システム、ロボット軌道計測方法およびロボット駆動方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250520BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームの軌道を精度よく計測することのできるロボット軌道計測システム、ロボット軌道計測方法およびロボット駆動方法を提供すること。
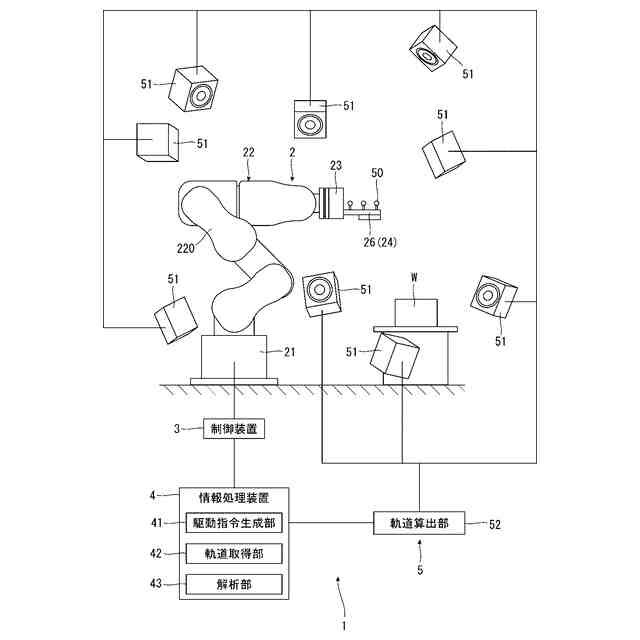
【解決手段】ロボット軌道計測システムは、ロボットアームに配置されている複数のマーカーと、前記ロボットアームの動作中に、前記複数のマーカーを撮像する撮像部と、前記撮像部が取得した画像に基づいて前記ロボットアームの軌道を算出する軌道算出部と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームに配置されている複数のマーカーと、
前記ロボットアームの動作中に、前記複数のマーカーを撮像する撮像部と、
前記撮像部が取得した画像に基づいて前記ロボットアームの軌道を算出する軌道算出部と、を有することを特徴とするロボット軌道計測システム。
続きを表示(約 960 文字)
【請求項2】
前記マーカーの数は、3つ以上であり、
前記撮像部を複数有する請求項1に記載のロボット軌道計測システム。
【請求項3】
前記撮像部は、互いに離間して3つ以上配置されている請求項2に記載のロボット軌道計測システム。
【請求項4】
3つ以上の前記撮像部は、前記ロボットアームの周囲を囲むように配置されている請求項3に記載のロボット軌道計測システム。
【請求項5】
3つ以上の前記撮像部は、前記ロボットアームの周囲に不規則に配置されている請求項3に記載のロボット軌道計測システム。
【請求項6】
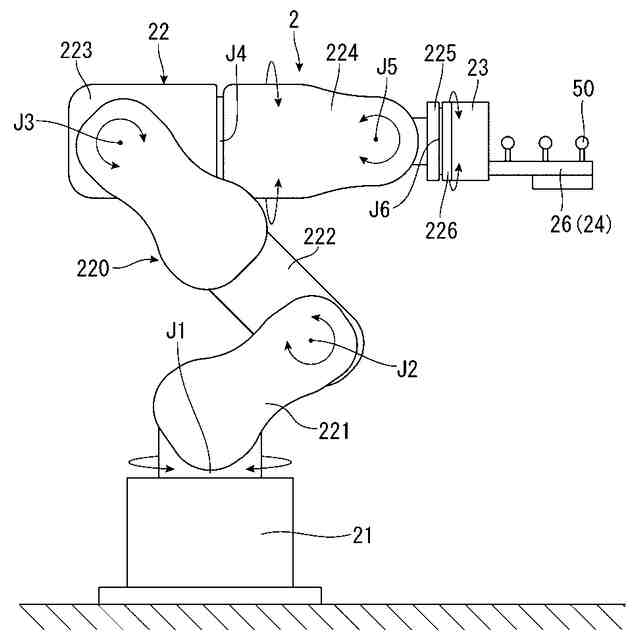
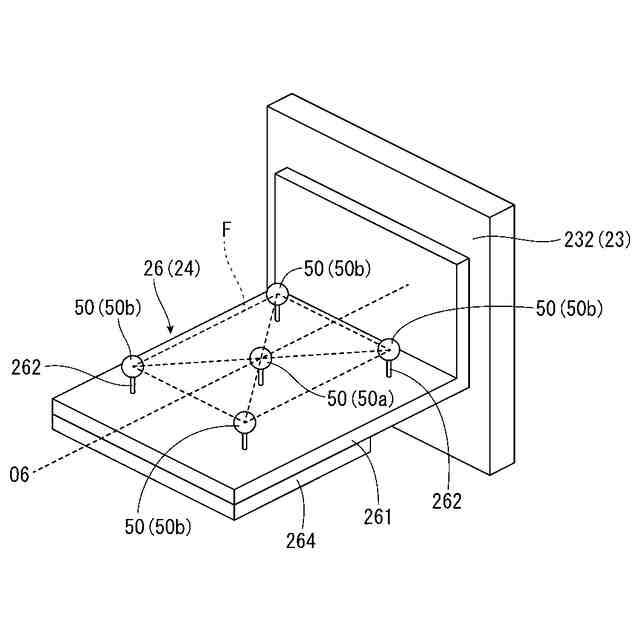
前記ロボットアームは、複数の関節を介して連結されている複数のアームを備えるロボットアーム本体と、前記ロボットアーム本体の先端部に接続されているエンドエフェクターと、を有し、
前記エンドエフェクターに前記3つ以上のマーカーが配置されている請求項2に記載のロボット軌道計測システム。
【請求項7】
前記3つ以上のマーカーは、前記ロボットアーム本体の最先端に位置する前記アームの中心軸を含む平面に沿って配置されている請求項6に記載のロボット軌道計測システム。
【請求項8】
前記3つ以上のマーカーは、前記中心軸上に配置されている前記マーカーと、前記中心軸から離間して配置されている前記マーカーと、を含む請求項7に記載のロボット軌道計測システム。
【請求項9】
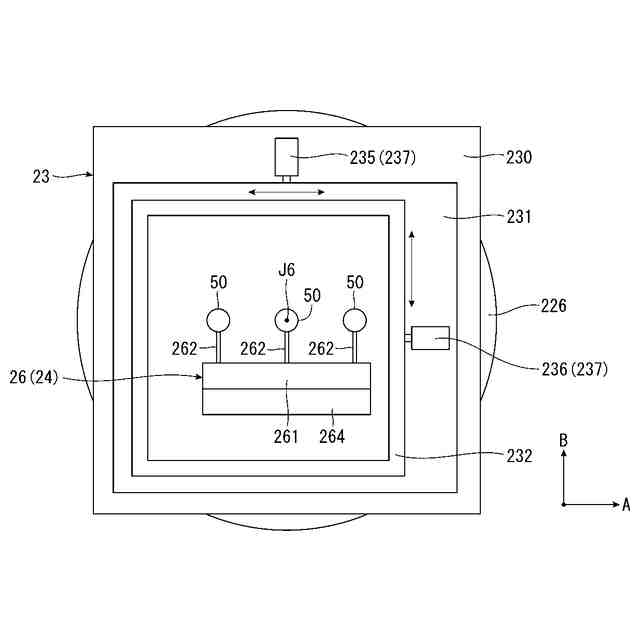
前記エンドエフェクターは、前記ロボットアームの最先端に位置する前記アームに接続されるベースと、前記ベースから突出して配置されている複数の棒状のピンと、を有し、前記ピンの先端部に前記マーカーが配置されている請求項6に記載のロボット軌道計測システム。
【請求項10】
ロボットアームに複数のマーカーを配置し、
前記ロボットアームの動作中に、撮像部が前記複数のマーカーを撮像して得られた画像に基づいて前記マーカーをトラッキングするモーションキャプチャーを行い、前記モーションキャプチャーの結果に基づいて前記ロボットアームの軌道を算出することを特徴とするロボット軌道計測方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット軌道計測システム、ロボット軌道計測方法およびロボット駆動方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、レーザートラッカーを用いてロボットハンドの位置や傾きを調整するロボット制御システムが開示されている。
【0003】
特許文献1に記載されたロボット制御システムは、ロボットと、立体カメラと、位置検出装置と、制御装置と、を有する。また、ロボットは、クリップを把持するロボットハンドと、ロボットハンドを支持するロボット本体部と、を有する。また、立体カメラは、ロボットハンドが把持するクリップの底面を撮像できる位置に配置されている。また、位置検出装置は、レーザートラッカーと、ロボットハンドに設置されたリフレクターと、立体カメラに設置されたリフレクターと、を有する。レーザートラッカーは、各リフレクターに対してレーザー光を照射し、各リフレクターで反射したレーザー光を受光することにより、各リフレクターの3次元位置を取得し、各リフレクターの3次元位置に基づいて、ロボットハンドの3次元位置を取得する。
【0004】
また、制御装置は、算出部と、ロボット制御部と、を有する。算出部は、立体カメラによって取得された画像に基づいて、撮像対象となったクリップの座標情報を算出し、立体カメラに対するクリップの位置や傾きを算出する。
【0005】
一方、ロボット制御部は、レーザートラッカーで取得されたロボットハンドの3次元位置に基づいて、立体カメラに対するロボットハンドの位置を調整し、ロボットハンドを撮像用定位置まで移動する。また、ロボット制御部は、算出部によって算出された立体カメラに対するロボットハンドの位置や傾きに基づいて、ロボットハンドの位置や傾きを調整する。さらに、ロボット制御部は、ロボットハンドに把持されたクリップが移動経路に沿って移動するようにロボットハンドを制御する。
【先行技術文献】
【特許文献】
【0006】
特開2017-226023号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、レーザートラッカーを用いてロボットの軌道を算出することは技術的に難しい。
【課題を解決するための手段】
【0008】
本発明のロボット軌道計測システムは、ロボットアームに配置されている複数のマーカーと、
前記ロボットアームの動作中に、前記複数のマーカーを撮像する撮像部と、
前記撮像部が取得した画像に基づいて前記ロボットアームの軌道を算出する軌道算出部と、を有する。
【0009】
本発明のロボット軌道計測方法は、ロボットアームに複数のマーカーを配置し、
前記ロボットアームの動作中に、撮像部が前記複数のマーカーを撮像して得られた画像に基づいて前記マーカーをトラッキングするモーションキャプチャーを行い、前記モーションキャプチャーの結果に基づいて前記ロボットアームの軌道を算出する。
【0010】
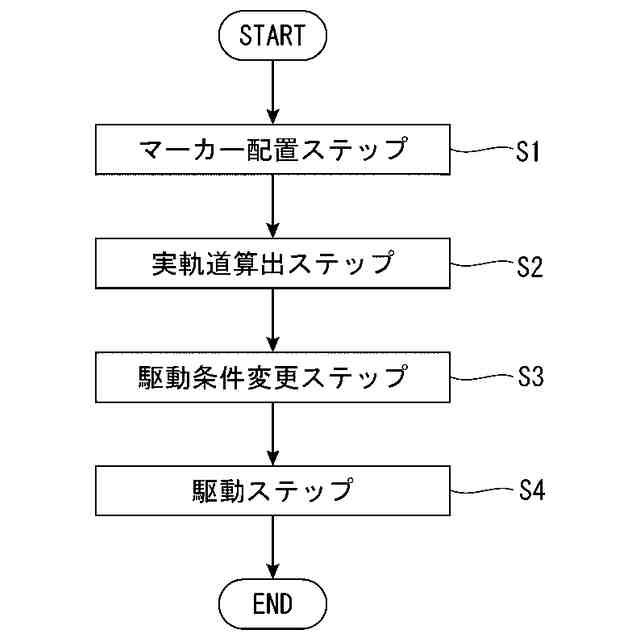
本発明のロボット駆動方法は、ロボットアームに複数のマーカーを配置し、
前記ロボットアームの動作中に、撮像部が前記複数のマーカーを撮像して得られた画像に基づいて前記マーカーをトラッキングするモーションキャプチャーを行い、前記モーションキャプチャーの結果に基づいて前記ロボットアームの軌道を算出し、
算出した前記軌道と目標軌道との差が小さくなるように、前記ロボットアームの駆動条件を変更し、
変更した前記駆動条件で前記ロボットアームを駆動する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
日東精工株式会社
電動ドライバ
今日
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
株式会社ダイヘン
移動体
3日前
トヨタ自動車株式会社
関節機構
5日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
14日前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
5日前
個人
バール
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社PILLAR
チューブ保持治具
10日前
株式会社アイエイアイ
グリッパー
20日前
庄内機械株式会社
釘打装置
18日前
住友重機械工業株式会社
ロボット
25日前
オークラ輸送機株式会社
ハンド装置
13日前
株式会社不二越
垂直多関節ロボット
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社リコー
多関節ロボット
4日前
株式会社マキタ
電動作業機
6日前
株式会社マキタ
電動作業機
6日前
トヨタ自動車東日本株式会社
搬送治具
18日前
芝浦機械株式会社
双腕ロボット
24日前
株式会社ダイヘン
ロボット制御システム
3日前
トヨタ自動車株式会社
荷姿影響緩和方法
21日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
学校法人法政大学
装着型アシスト装置
1か月前
アピュアン株式会社
エアー式衝撃工具
1か月前
住友重機械工業株式会社
ロボット及びカバー
25日前
株式会社マキタ
電動工具
18日前
個人
回転移動式工具ホルダ
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































