TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080669
公報種別
公開特許公報(A)
公開日
2025-05-26
出願番号
2023193972
出願日
2023-11-14
発明の名称
ロボット制御装置及びロボット制御方法
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
B25J
9/10 20060101AFI20250519BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットがワークを加工機に供給するワーク供給位置を自動的に調整できるロボット制御装置を提供する。
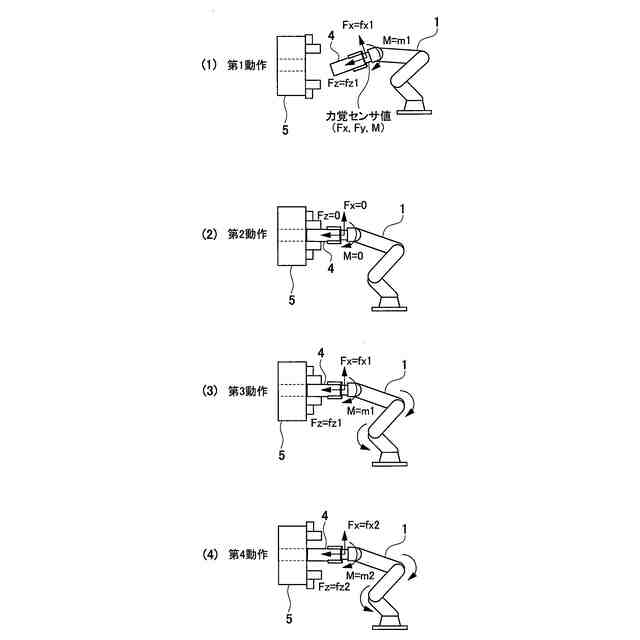
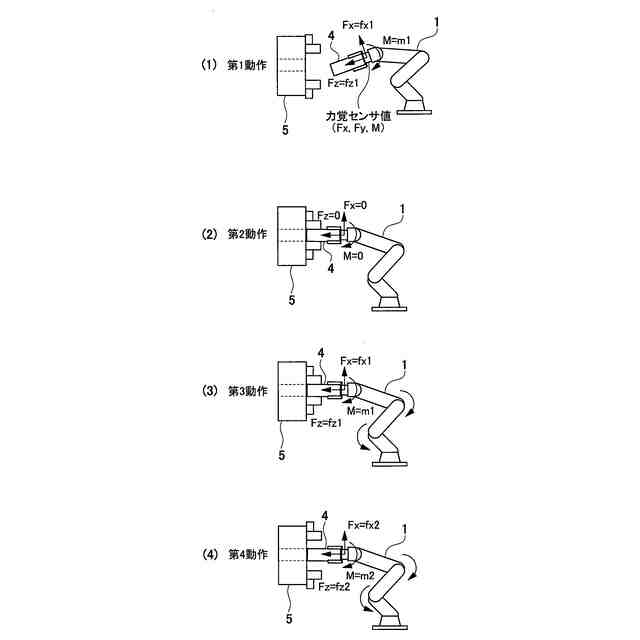
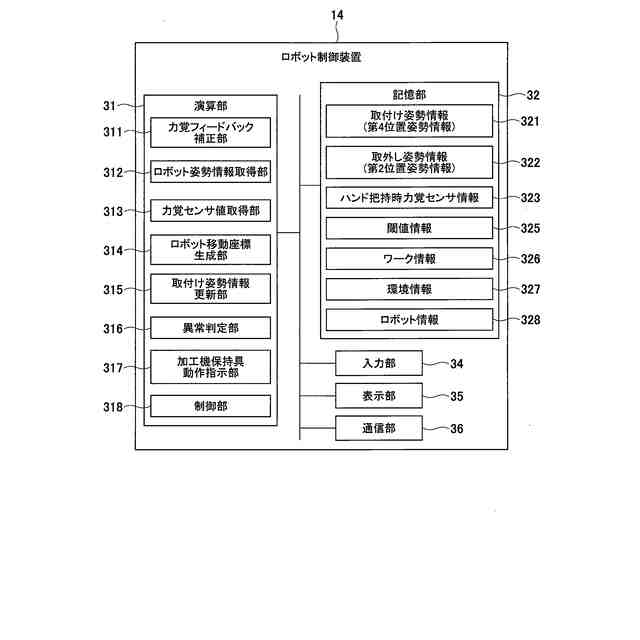
【解決手段】制御部318は、ロボットアーム1に保持させたワーク4をワーク供給位置まで移動させる第1動作と、加工機保持具5からワーク4を取り外す取外し姿勢情報を取得する第2動作と、加工機保持具5及びロボットアーム1にワーク4を保持させて、取得する負荷情報が、第1動作で取得した負荷情報と等しくなるようにロボットアーム1の姿勢を制御する第3動作と、加工機保持具5にワーク4を保持させずにロボットアーム1を動かして取得する負荷情報と、加工機保持具5にワーク4を保持させて加工機保持具5にワーク4の負荷をかけた状態で取得する負荷情報とが等しくなった場合に、ロボットアーム1の取付け姿勢情報を取得する第4動作と、によりロボットアーム1及び加工機保持具5の動作を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
ワークの加工機が有する加工機保持部に対して前記ワークの取付け及び取外しを行うロボットを制御するロボット制御装置であって、
前記ロボット制御装置は、
前記ワークを保持する前記ロボットにかかる負荷を表す負荷情報を取得する負荷情報取得部と、
前記ロボットの姿勢を表す姿勢情報を取得する姿勢情報取得部と、
前記ロボット及び前記加工機の動作を制御する制御部と、を備え、
前記制御部は、
前記ロボットに前記ワークを保持させて、前記負荷情報取得部から前記負荷情報を取得し、前記ロボットに保持させた前記ワークを、前記加工機保持部のワーク供給位置まで移動させる第1動作と、
前記加工機保持部及び前記ロボットに前記ワークを保持させて、前記加工機保持部に前記ワークの負荷をかけ、前記ロボットにかかる負荷を無くした状態における前記ロボットの姿勢情報を取外し姿勢情報として前記姿勢情報取得部から取得する第2動作と、
前記加工機保持部及び前記ロボットに前記ワークを保持させて、前記負荷情報取得部から取得する前記負荷情報が、前記第1動作で取得した前記負荷情報と等しくなるように前記ロボットの姿勢を制御する第3動作と、
前記加工機保持部に前記ワークを保持させずに前記ロボットを動かして前記負荷情報取得部から取得する負荷情報と、前記加工機保持部に前記ワークを保持させて前記加工機保持部に前記ワークの負荷をかけた状態で前記負荷情報取得部から取得する負荷情報とが等しくなった場合に、前記ロボットの姿勢情報を取付け姿勢情報として前記姿勢情報取得部から取得する第4動作と、により前記ロボット及び前記加工機の動作を制御する
ロボット制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記加工機保持部に前記ワークの負荷がかかっている状態で、前記ワークを保持する前記ロボットにかかる負荷が予め設定した閾値より小さくなるように前記ロボットの姿勢を補正するための補正情報を前記制御部に出力する補正部を備える
請求項1に記載のロボット制御装置。
【請求項3】
前記補正部により補正された前記ロボットの姿勢に基づいて前記ロボットの移動先を表すロボット移動座標を生成するロボット移動座標生成部と、を備え、
前記制御部は、前記ロボット移動座標に前記ロボットを移動させた後に、前記負荷情報取得部から前記負荷情報を取得
する
請求項2に記載のロボット制御装置。
【請求項4】
前記負荷情報、前記取付け姿勢情報、前記取外し姿勢情報、及び前記ロボット移動座標を記憶する記憶部と、
前記記憶部に記憶されている前記取付け姿勢情報を、前記制御部が取得した前記取付け姿勢情報で更新する取付け姿勢情報更新部と、を備え、
前記制御部は、前記記憶部から読み出した前記ロボット移動座標に基づいて前記ロボットを移動させ、前記姿勢情報取得部から前記姿勢情報を取得し、前記記憶部から読み出した前記取付け姿勢情報に基づいて、前記ワークを保持した前記ロボットの姿勢を制御する
請求項3に記載のロボット制御装置。
【請求項5】
定期的に前記第1動作、前記第2動作、前記第3動作、及び前記第4動作が順に行われて前記記憶部に記憶された複数の前記取付け姿勢情報の傾向に基づいて、前記ロボットの異常を判定する異常判定部を備える
請求項4に記載のロボット制御装置。
【請求項6】
前記負荷情報取得部は、前記ワークを保持する前記ロボットにかかる外力に略比例した信号を出力する
請求項4に記載のロボット制御装置。
【請求項7】
前記負荷情報取得部は、前記ロボットに取り付けられた、力覚センサ、圧力センサ、画像センサ、及びストレインゲージのうち、少なくとも一つを含む
請求項6に記載のロボット制御装置。
【請求項8】
前記加工機保持部は、開閉動作により前記ワークを把持するハンド、磁力により吸着した前記ワークを保持する電磁石、減圧により吸着した前記ワークを保持する吸着部、又はカギ状のツメにより引っかけた前記ワークを保持する引っかけ部のいずれかである
請求項6に記載のロボット制御装置。
【請求項9】
前記加工機保持部に対する動作を指示する加工機保持部動作指示部を備える
請求項6に記載のロボット制御装置。
【請求項10】
ワークの加工機が有する加工機保持部に対して前記ワークの取付け及び取外しを行うロボットを制御するロボット制御方法であって、
前記ロボットに前記ワークを保持させて、前記ワークを保持する前記ロボットにかかる負荷を表す負荷情報を負荷情報取得部から取得し、前記ロボットに保持させた前記ワークを、前記加工機保持部のワーク供給位置まで移動させる第1動作と、
前記加工機保持部及び前記ロボットに前記ワークを保持させて、前記加工機保持部に前記ワークの負荷をかけ、前記ロボットにかかる負荷を無くした状態における前記ロボットの姿勢を表す姿勢情報を取外し姿勢情報として姿勢情報取得部から取得する第2動作と、
前記加工機保持部及び前記ロボットに前記ワークを保持させて、前記負荷情報取得部から取得する前記負荷情報が、前記第1動作で取得した前記負荷情報と等しくなるように前記ロボットの姿勢を制御する第3動作と、
前記加工機保持部に前記ワークを保持させずに前記ロボットを動かして前記負荷情報取得部から取得する負荷情報と、前記加工機保持部に前記ワークを保持させて、前記加工機保持部に前記ワークの負荷をかけた状態で前記負荷情報取得部から取得する負荷情報とが等しくなった場合に、前記ロボットの姿勢情報を取付け姿勢情報として前記姿勢情報取得部から取得する第4動作と、により前記ロボット及び前記加工機の動作を制御する
ロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置及びロボット制御方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
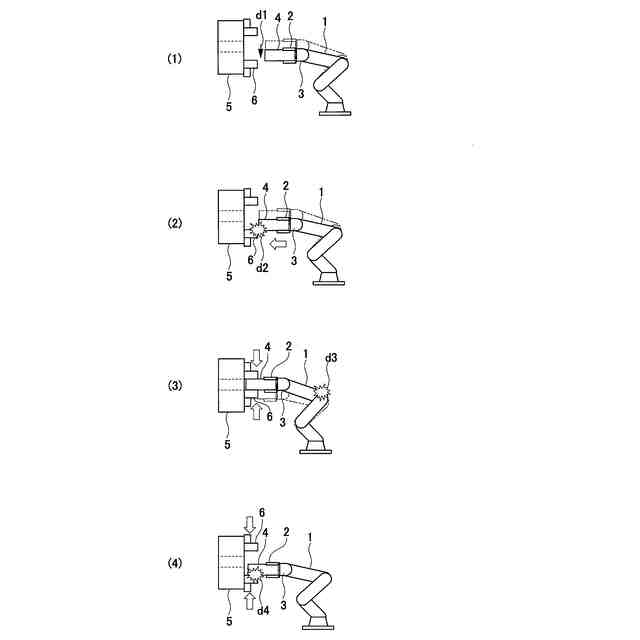
従来、ロボットアーム等のロボットを動かしてワークを加工機保持具に着脱する作業がある。この作業では、ロボットアームが加工機保持具にワークを供給するワーク供給位置が本来の位置からずれることがある。ワーク供給位置のずれが生じると、ロボットアームが加工機の加工機保持具にワークを挿入する際にミスが起きたり、加工機保持具が閉じるときにワークを傷つけたりするという問題があった。また、ロボットアームが重量物であるワークを扱う時に、ロボットアームがたわんでワーク位置が下がることもあった。このため、ワーク供給位置のずれ量を自動で測定し、ワーク供給位置を補正する自動教示機能が求められていた。
【0003】
特許文献1には、「ワークを保持するツールと、ワークが保持された状態でツールに作用する力を計測する力計測部と、を備えていて、ワークを保持して搬送するロボットアームを制御する制御装置」について開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2014-210311号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
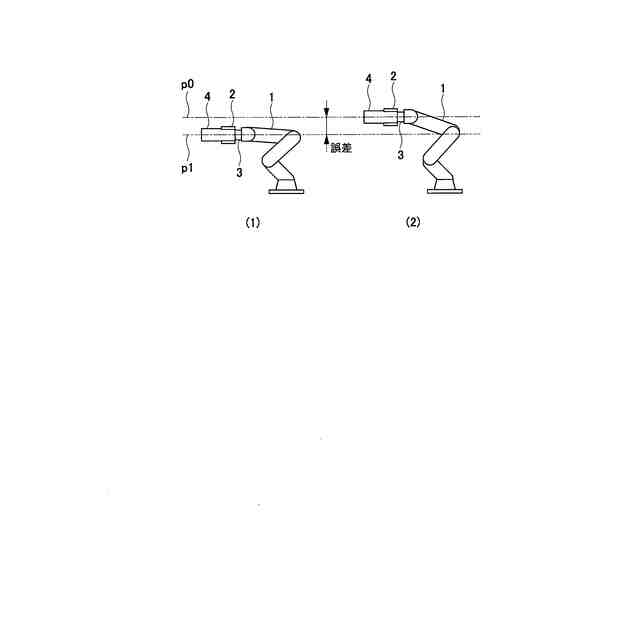
従来、ロボットアームに取り付けた力覚センサ情報から、把持しているワークの重心位置と姿勢を推定することでワーク供給位置を調整する方法があった。従来の方法では、ワークの重心位置は求められたものの、実際にワークを移動させるロボットアームの姿勢が想定した姿勢と変わることで、高さ方向に誤差が生じることがあった。例えば、ロボットアームが重量物のワークを扱う場合、ロボットアームのたわみによってハンドの位置が変化するので、従来の方法では、ワーク供給位置のずれ量を検出できなかった。
【0006】
また、ハンドに取り付けたカメラが撮影するカメラ画像に基づいて、ワーク供給位置のずれ量を推定してワーク供給位置を調整する方法もあった。しかし、この方法では、ロボットアームにかかる負荷を推定できず、ロボットアームに過負荷がかかると、ロボットアームの動作が停止することがあった。
【0007】
本発明はこのような状況に鑑みて成されたものであり、ロボットがワークを加工機に供給するワーク供給位置を自動的に調整できるようにすることを目的とする。
【課題を解決するための手段】
【0008】
本発明は、ワークの加工機が有する加工機保持部に対してワークの取付け及び取外しを行うロボットを制御するロボット制御装置である。このロボット制御装置は、ワークを保持するロボットにかかる負荷を表す負荷情報を取得する負荷情報取得部と、ロボットの姿勢を表す姿勢情報を取得する姿勢情報取得部と、ロボット及び加工機の動作を制御する制御部と、を備える。制御部は、ロボットにワークを保持させて、負荷情報取得部から負荷情報を取得し、ロボットに保持させたワークを、加工機保持部のワーク供給位置まで移動させる第1動作と、加工機保持部及びロボットにワークを保持させて、加工機保持部にワークの負荷をかけ、ロボットにかかる負荷を無くした状態におけるロボットの姿勢情報を取外し姿勢情報として取得する第2動作と、加工機保持部及びロボットにワークを保持させて、負荷情報取得部から取得する負荷情報が、第1動作で取得した負荷情報と等しくなるようにロボットの姿勢を制御する第3動作と、加工機保持部にワークを保持させずにロボットを動かして負荷情報取得部から取得する負荷情報と、加工機保持部にワークを保持させて加工機保持部にワークの負荷をかけた状態で負荷情報取得部から取得する負荷情報とが等しくなった場合に、ロボットの姿勢情報を取付け姿勢情報として姿勢情報取得部から取得する第4動作と、によりロボット及び加工機の動作を制御する。
【発明の効果】
【0009】
本発明によれば、ロボットがワークを加工機に供給するワーク供給位置を自動的に調整できるようになる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
従来のロボット制御により、ロボットアームが加工機保持具にワークを供給する時に生じる不具合の例を示す図である。
従来のロボット制御により、ワークを把持したハンドのワーク供給位置が変化する様子を示す図である。
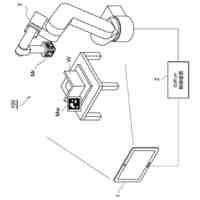
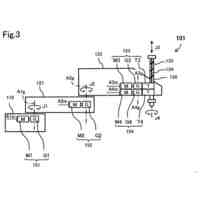
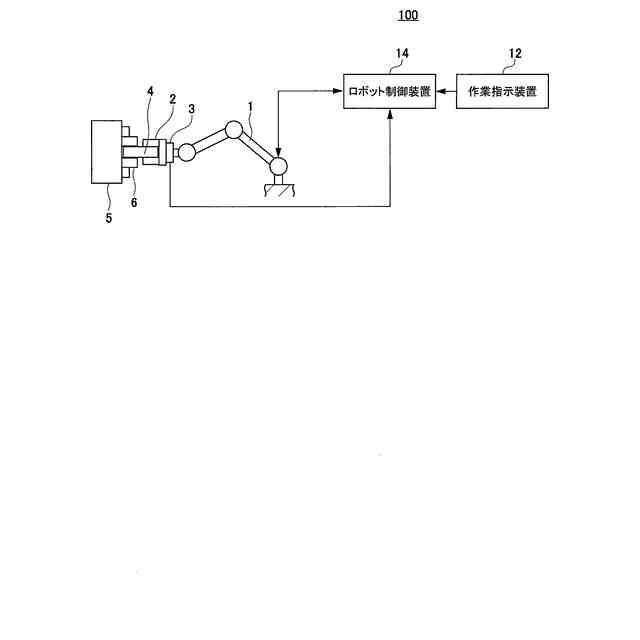
本発明の一実施形態に係るロボット制御システムの全体構成例を示すブロック図である。
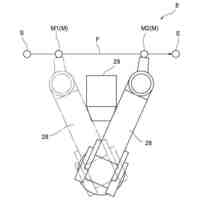
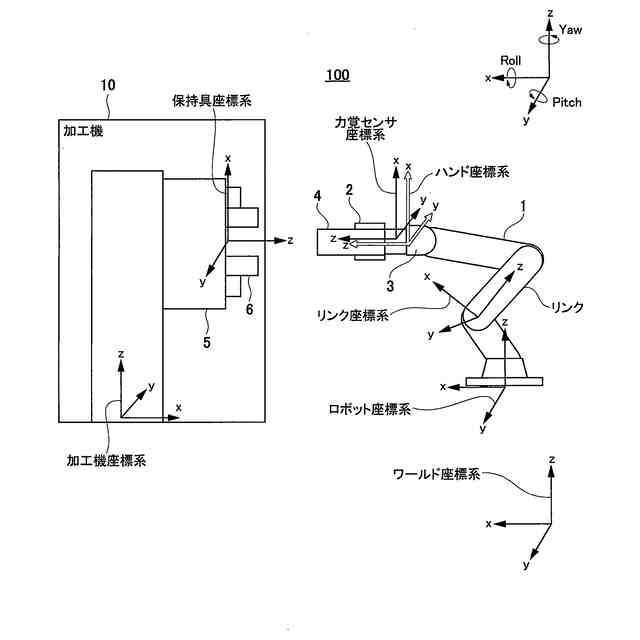
本発明の一実施形態に係るロボット制御システムで用いられる各種の座標系を示す図である。
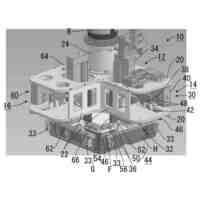
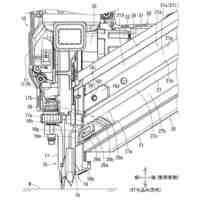
本発明の一実施形態に係るロボット制御システムで動作が制御されるロボットアームと、加工機保持具の動作の一例を示す図である。
本発明の一実施形態に係るロボット制御装置の内部構成例を示すブロック図である。
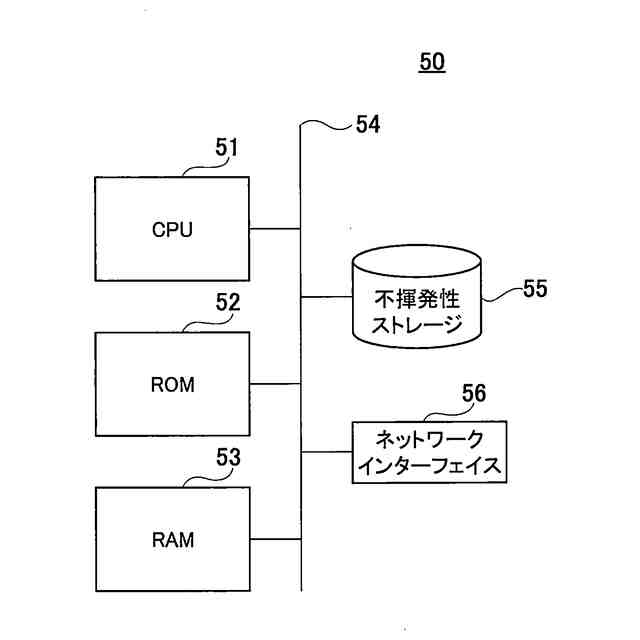
本発明の一実施形態に係る計算機のハードウェア構成例を示すブロック図である。
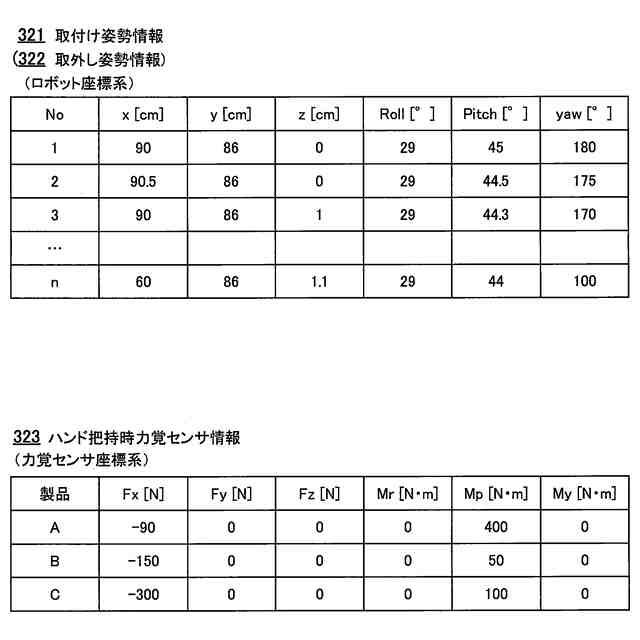
本発明の一実施形態に係る取付け姿勢情報、取外し姿勢情報、及びハンド把持時力覚センサ情報のデータ形式を表す構成図である。
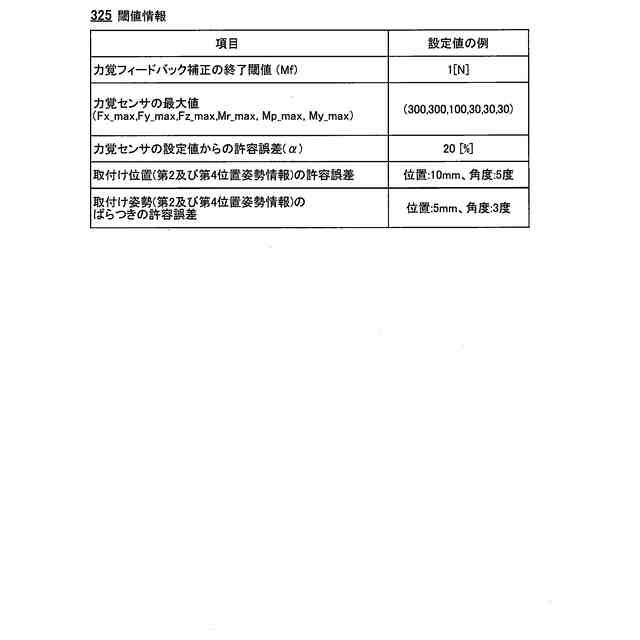
本発明の一実施形態に係る閾値情報のデータ形式を表す構成図である。
本発明の一実施形態に係るワーク情報のデータ形式と、各部の寸法を示す図である。
本発明の一実施形態に係る環境情報のデータ形式を表す構成図である。
本発明の一実施形態に係るロボット情報のデータ形式を表す構成図である。
本発明の一実施形態に係るロボットアームの制御処理の前半部分を表すフローチャートである。
本発明の一実施形態に係るロボットアームの制御処理の後半部分を表すフローチャートである。
本発明の一実施形態に係る第1の異常判定条件の例を示す図である。
本発明の一実施形態に係る第2及び第3の異常判定条件の例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
2日前
トヨタ自動車株式会社
関節機構
4日前
株式会社不二越
ロボット
1か月前
東京都公立大学法人
対象物把持装置
13日前
学校法人五島育英会
アーム機構
4日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
住友重機械工業株式会社
ロボット
24日前
川崎重工業株式会社
制動システム
1か月前
株式会社PILLAR
チューブ保持治具
9日前
庄内機械株式会社
釘打装置
17日前
株式会社アイエイアイ
グリッパー
19日前
オークラ輸送機株式会社
ハンド装置
12日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社リコー
多関節ロボット
3日前
株式会社マキタ
電動作業機
5日前
トヨタ自動車東日本株式会社
搬送治具
17日前
株式会社マキタ
電動作業機
5日前
芝浦機械株式会社
双腕ロボット
23日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車株式会社
荷姿影響緩和方法
20日前
株式会社ダイヘン
ロボット制御システム
2日前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
株式会社マキタ
電動工具
17日前
個人
回転移動式工具ホルダ
11日前
住友重機械工業株式会社
ロボット及びカバー
24日前
株式会社ダイヘン
端末装置
17日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
24日前
住友重機械工業株式会社
アクチュエータ支持部材
23日前
株式会社マキタ
打ち込み工具
17日前
株式会社マキタ
打ち込み工具
17日前
株式会社マキタ
打ち込み工具
1か月前
セイコーエプソン株式会社
多関節ロボット
2日前
DIC株式会社
ロボット用保護具・プロテクタ
3日前
株式会社不二越
軌道生成装置及び軌道生成プログラム
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ