TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079079
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191512
出願日
2023-11-09
発明の名称
車両用制御装置
出願人
ダイハツ工業株式会社
代理人
個人
主分類
B60T
7/12 20060101AFI20250514BHJP(車両一般)
要約
【課題】適切なタイミングで衝突防止制御を行うことができる車両用制御装置を提供する。
【解決手段】
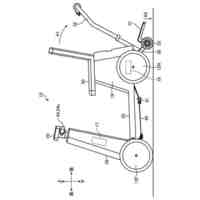
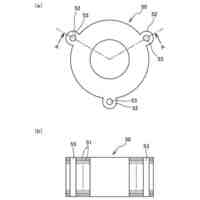
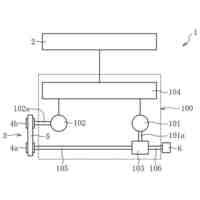
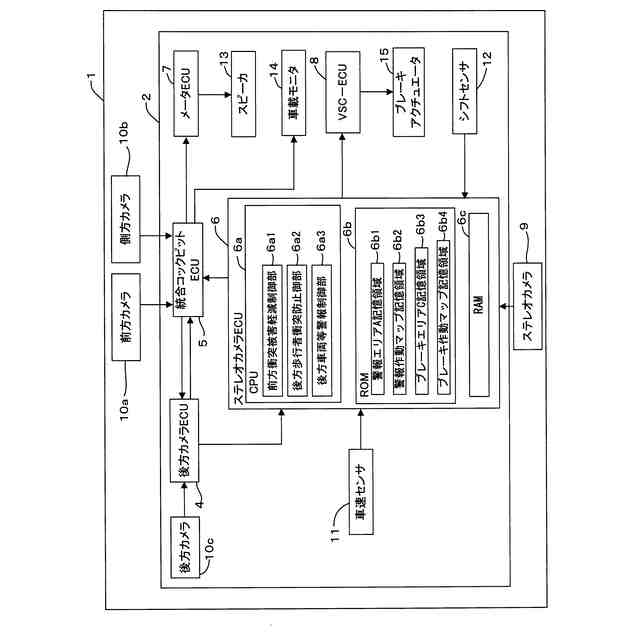
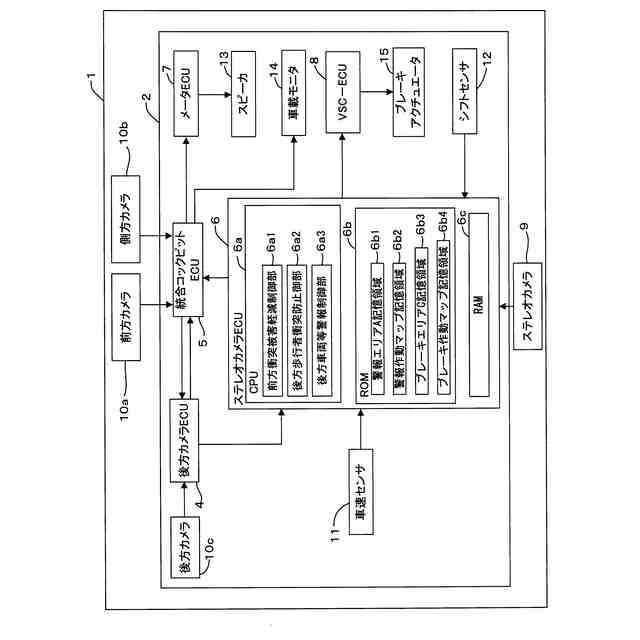
本発明の後方衝突防止制御装置2は、後方衝突防止制御を実行する範囲として、車両1に近い方のエリアA,Cと、遠い方のエリアB,Dとに分けられる。ここで、エリアB,Dの範囲は、車両1の速度(後進速度)に応じて変更される。そして、後方カメラ10cにより得られた後方画像データに基づいて、車両1の後方の歩行者がエリアA~Dのいずれかに存在するか否かが後方歩行者衝突防止制御部6a2により判定される。ここで、歩行者がエリアA~Dのいずれかに存在すると判定された場合は、警報の吹鳴制御および自動ブレーキ作動制御が実行される。
【選択図】図1
特許請求の範囲
【請求項1】
移動物標が自車両から所定の領域に入った場合に衝突防止制御を行う車両用制御装置であって、
前記自車両と前記移動物標との距離を検出する単一の外界認識センサと、
前記衝突防止制御を実行する制御部と、
を備え、
前記所定の領域は、前記単一の外界認識センサで前記距離を検出する範囲であり、自車から所定の範囲で固定される第1の範囲と、前記第1の範囲よりも自車から離れた範囲であって、当該範囲が可変する第2の範囲とを有し、
前記制御部は、前記第2の範囲を自車速に応じて変更する制御範囲変更部を備えることを特徴とする車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動物標が自車両から所定の領域に入った場合に衝突防止制御を行う車両用制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
車両が後方の移動物標と衝突する可能性が高まった場合に、警報を吹鳴したり自動ブレーキを作動させたりして、衝突被害を防止または軽減する衝突被害軽減制御を行う車両がある。例えば、特許文献1に記載の車両走行支援装置では、車両の後方に存在する他車や物体と、自車両との距離を後方車間距離センサにより検出するとともに、車速センサにより自車速を検出する。そして、警報音を吹鳴する際は、対象物との車間距離に応じて警報音のフレーズを決定し、自車速に応じて警報音のテンポを決定する。これにより、乗員は
警報音により自車速と対象物との距離を把握することができる。
【先行技術文献】
【特許文献】
【0003】
特開平11-208370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した特許文献1に記載の車両走行支援装置の同種の装置として、例えばソナーで検出した物標が所定距離内に入った場合に警報を吹鳴する後方衝突防止装置もあるが、この種の装置では、自車両と、他車や物体などの移動物標との相対速度が速い場合には、警報が間に合わないおそれがある。
【0005】
本発明は、上記した課題を鑑みてなされたものであり、適切なタイミングで衝突防止制御を行うことができる車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記の目的を達成するため、本発明にかかる車両用制御装置は、移動物標が自車両から所定の領域に入った場合に衝突防止制御を行う車両用制御装置であって、自車両と移動物標との距離を検出する単一の外界認識センサと、衝突防止制御を実行する制御部と、を備え、所定の領域は、単一の外界認識センサで距離を検出する範囲であり、自車から所定の範囲で固定される第1の範囲と、第1の範囲よりも自車から離れた範囲であって、当該範囲が可変する第2の範囲とを有し、制御部は、第2の範囲を自車速に応じて変更する制御範囲変更部を備えることを特徴としている。
【発明の効果】
【0007】
この構成によると、制御範囲変更部により第2の範囲が自車速に応じて変更される。そして、自車速に応じて変更された第2の範囲に移動物標が入った場合に衝突防止制御が
行われる。このようにすると、第2の範囲において、自車速に応じた適切なタイミングで衝突防止制御を行うことができる。また、第2の範囲よりも自車両に近い第1の範囲では、外界認識センサにより自車両と移動物標との距離の検出精度が高い。したがって、第1の範囲では、外界認識センサにより検出された自車両と移動物標との距離に基づいて、確実に衝突防止制御を行うことができる。したがって、適切なタイミングで衝突防止制御を行うことができる車両用制御装置を提供できる。
【図面の簡単な説明】
【0008】
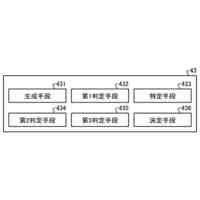
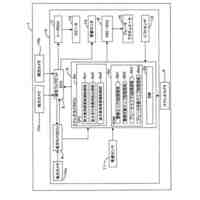
本発明の一実施形態に係る後方衝突防止制御装置の概略構成を示すブロック図である。
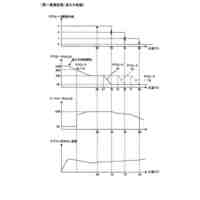
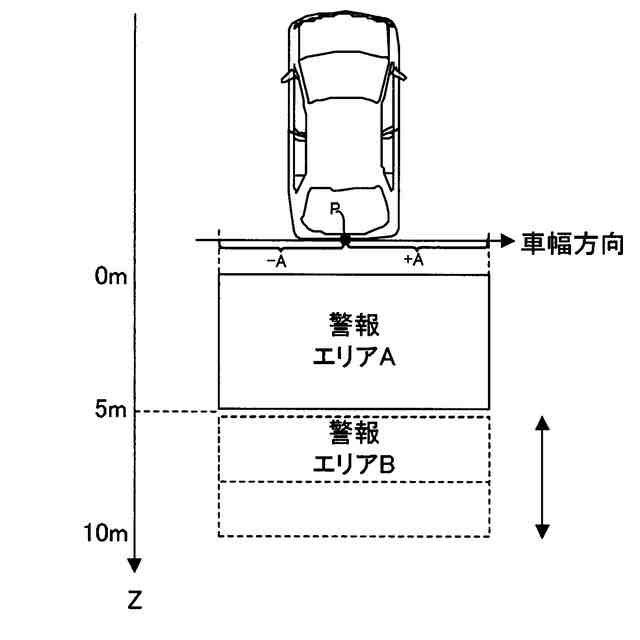
図1の後方衝突防止制御装置の警報エリアを説明するための図である。
図1の後方衝突防止制御装置のブレーキ作動エリアを説明するための図である。
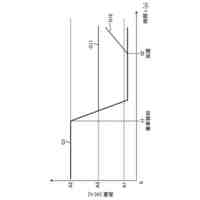
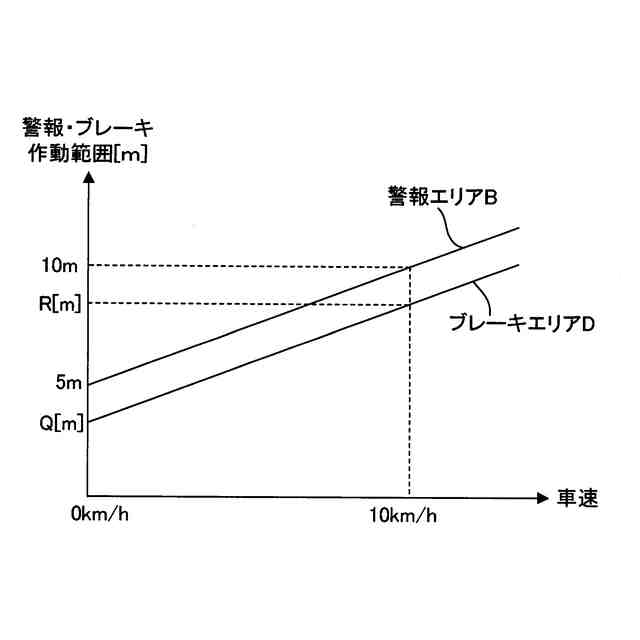
図2の警報エリアBの範囲を決定する警報作動範囲と自車速との関係および図3のブレーキ作動エリアDの範囲を決定するブレーキ作動範囲と自車速との関係を示す図である。
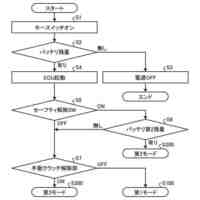
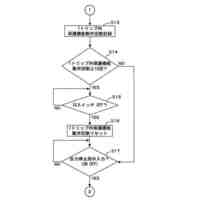
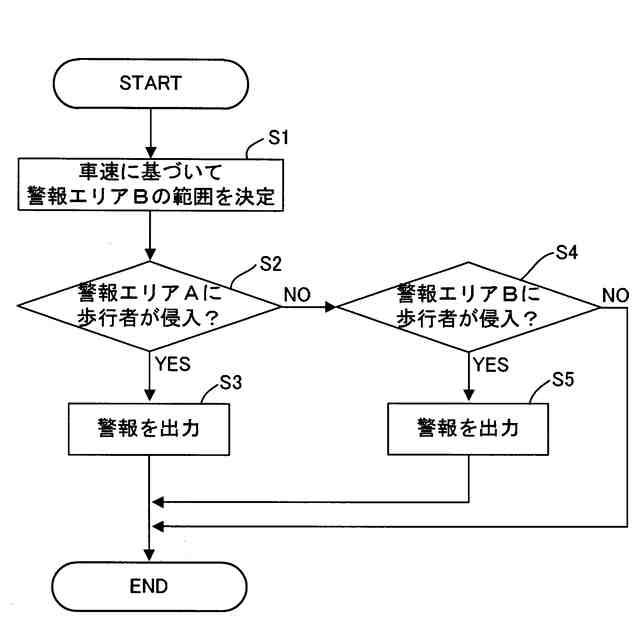
本実施形態の警報出力処理の一例を示すフローチャートである。
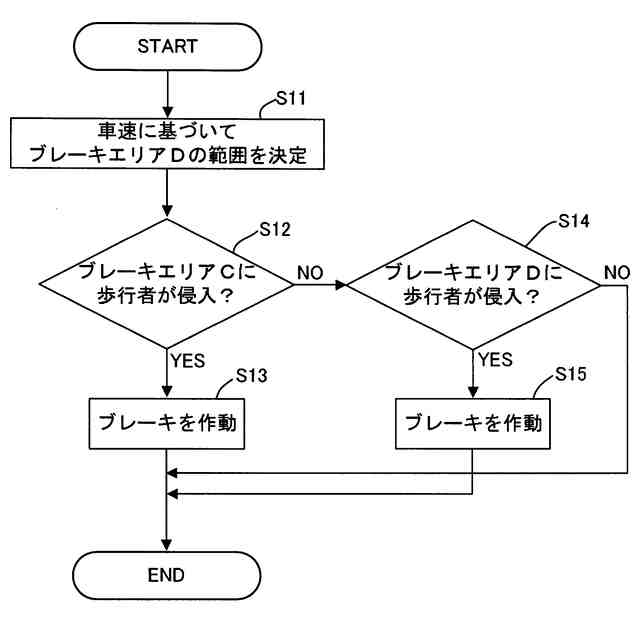
本実施形態のブレーキ作動処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
<実施形態>
本発明の一実施形態にかかる後方衝突防止制御装置について、図1を参照して説明する。なお、図1は本発明の一実施形態に係る後方衝突防止制御装置の概略構成図である。
【0010】
(後方衝突被害防止制御装置の概略構成)
本願の一実施形態にかかる後方衝突防止制御装置2(本発明の「車両用制御装置」に相当)は、車両1に配設されるものであり、車両1の後方に存在する歩行者などの移動物標が、当該車両から所定の領域に入った場合に衝突防止制御を行うものである。ここで、衝突防止制御とは、例えば、移動物標が所定の領域に入った場合に行う警報の吹鳴に関する制御や、自動ブレーキに関する制御を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ダイハツ工業株式会社
電動車
1か月前
ダイハツ工業株式会社
車両構造
21日前
ダイハツ工業株式会社
試料セル
29日前
ダイハツ工業株式会社
車両構造
10日前
ダイハツ工業株式会社
内燃機関
9日前
ダイハツ工業株式会社
電池パック
4日前
ダイハツ工業株式会社
電動車椅子
4日前
ダイハツ工業株式会社
車両制御装置
4日前
ダイハツ工業株式会社
車両制御装置
10日前
ダイハツ工業株式会社
車両制御装置
10日前
ダイハツ工業株式会社
車両制御装置
4日前
ダイハツ工業株式会社
車両制御装置
4日前
ダイハツ工業株式会社
ラジエータ装置
23日前
ダイハツ工業株式会社
車両用制御装置
21日前
ダイハツ工業株式会社
モータ製造装置
14日前
ダイハツ工業株式会社
車両用制御装置
10日前
ダイハツ工業株式会社
車両の制御装置
25日前
ダイハツ工業株式会社
車両用制御装置
22日前
ダイハツ工業株式会社
車両用制御装置
2日前
ダイハツ工業株式会社
車両用制御装置
10日前
ダイハツ工業株式会社
ルーフキャリア
4日前
ダイハツ工業株式会社
ハーネス配索構造
9日前
ダイハツ工業株式会社
ハーネス配索構造
9日前
ダイハツ工業株式会社
片側スポット溶接方法
4日前
ダイハツ工業株式会社
トランスアクスルの試験装置及び試験方法
7日前
ニデックインスツルメンツ株式会社
ポンプ装置
21日前
ニデックインスツルメンツ株式会社
ポンプ装置
21日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
蓄電装置の製造方法
14日前
トヨタ自動車株式会社
蓄電装置および蓄電装置の製造方法
29日前
個人
飛行自動車
3か月前
個人
車窓用防虫網戸
10日前
個人
警告装置
1か月前
個人
小型EVシステム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ