TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025073354
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023184060
出願日
2023-10-26
発明の名称
車両制御装置
出願人
ダイハツ工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/08 20120101AFI20250502BHJP(車両一般)
要約
【課題】従来に比して、検知した点群データから車両の周辺に存在する物標を検出することができる車両制御装置を提供することができる車両の制御装置を提供する。
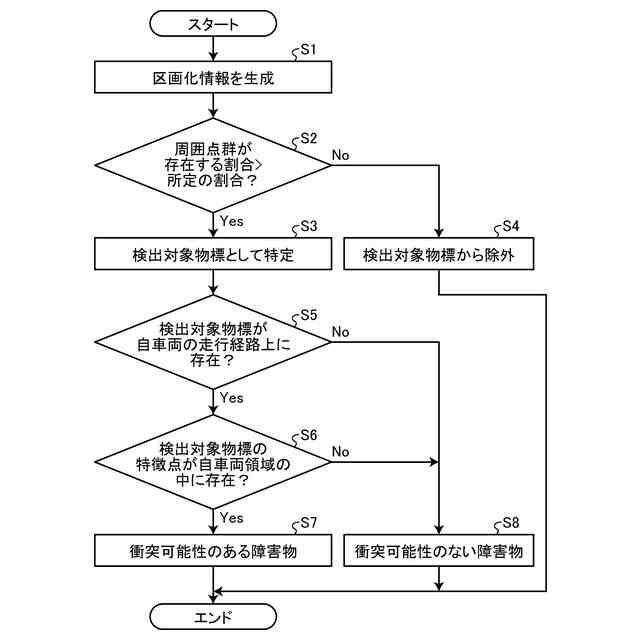
【解決手段】本発明に係る車両制御装置は、自車両の周囲の特徴点の点群である周囲点群を検知する測距センサを備える車両制御装置であって、前記測距センサにより検知された周囲点群を示す周囲点群情報に基づいて、前記周囲点群を所定の領域に区画する区画化情報を生成する生成手段と、前記区画化情報の前記所定の領域において、前記周囲点群が存在する割合が所定の割合を上回る場合、前記区画化情報に含まれる前記周囲点群について、前記自車両の周囲に存在する検出対象物標として特定する特定手段と、を備える。
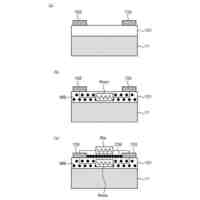
【選択図】図3
特許請求の範囲
【請求項1】
自車両の周囲の特徴点の点群である周囲点群を検知する測距センサを備える車両制御装置であって、
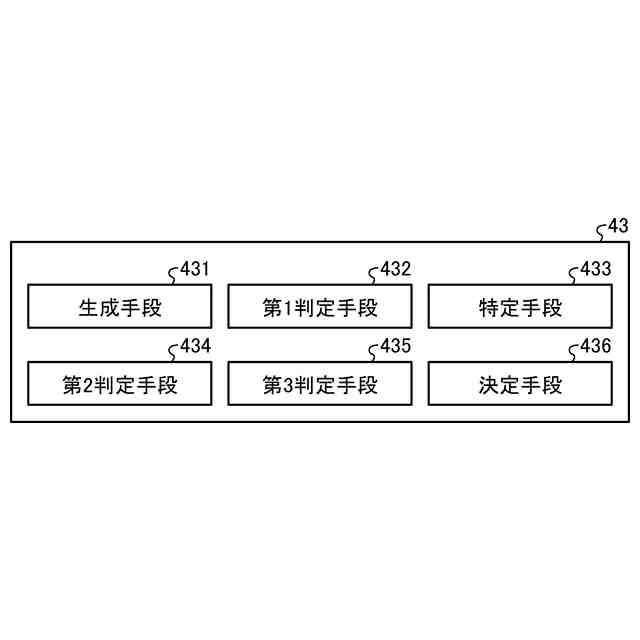
前記測距センサにより検知された周囲点群を示す周囲点群情報に基づいて、前記周囲点群を所定の領域に区画する区画化情報を生成する生成手段と、
前記区画化情報の前記所定の領域において、前記周囲点群が存在する割合が所定の割合を上回る場合、前記区画化情報に含まれる前記周囲点群について、前記自車両の周囲に存在する検出対象物標として特定する特定手段と、
を備える車両制御装置。
続きを表示(約 410 文字)
【請求項2】
前記周囲点群は、前記自車両の位置を原点とする3軸の直交座標系に位置し、
前記生成手段は、前記3軸の直交座標系における3次元座標に位置する前記周囲点群について、前記3軸の直交座標系のうち、前記自車両が進行する車両進行方向の座標軸を削除し、前記自車両の位置を原点とする2軸の直交座標系に対応した2次元座標に変換し、前記区画化情報を生成する、
請求項1に記載の車両制御装置。
【請求項3】
前記検出対象物標の特徴点が、前記車両進行方向に存在し、かつ、前記自車両の車幅及び前記自車両の高さから設定される自車両領域の中に存在する場合、前記自車両の障害物であると決定する決定手段を備え、
前記決定手段は、前記検出対象物標の特徴点が、前記車両進行方向に存在し、かつ、前記自車両領域の中に存在しない場合、前記自車両の障害物ではないと決定する、
請求項2に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
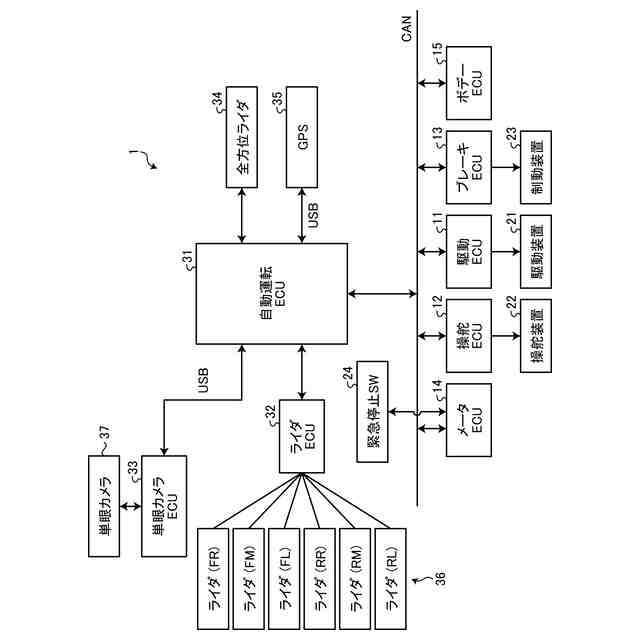
近年、車両をユーザの運転操作によらずに走行させる自動運転について研究が進められている。自動運転の制御では、例えば、車両に搭載されたライダにより物標を検知し、検知した点群データから車両周辺に存在する物標であるかを特定する車両制御装置に関する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-32069号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
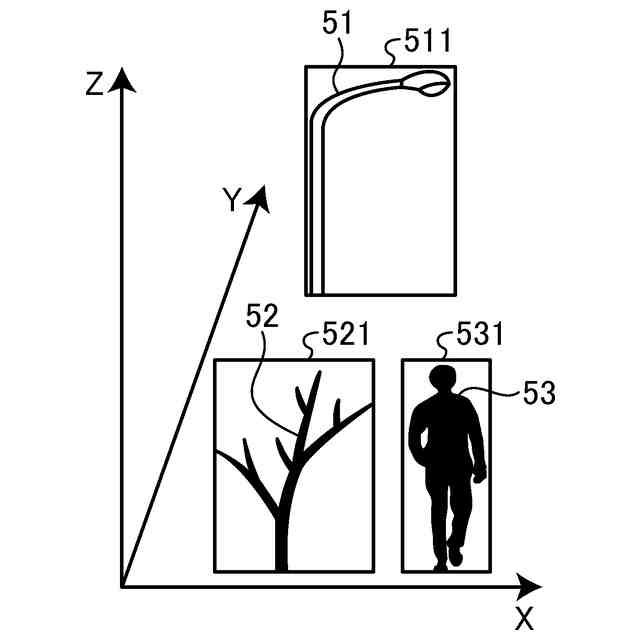
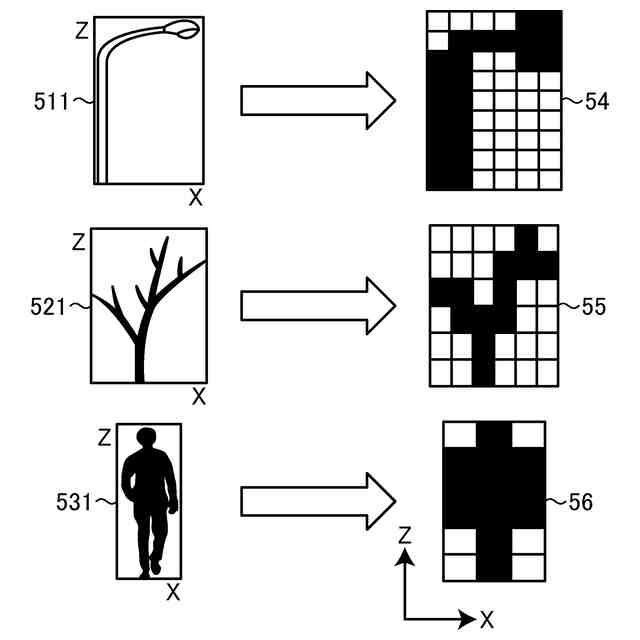
ところで、車両制御装置は、点群データから物標であるかを特定する場合、例えば、道路脇に存在する構造物(一例として、街灯、電柱、街路樹等)が人間の大きさに略等しいと、構造物が人間として特定される場合があるため、更なる改善の余地がある。
【0005】
本発明の目的は、上述の課題に鑑みてなされたものであって、従来に比して、検知した点群データから車両の周辺に存在する物標を検出することができる車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
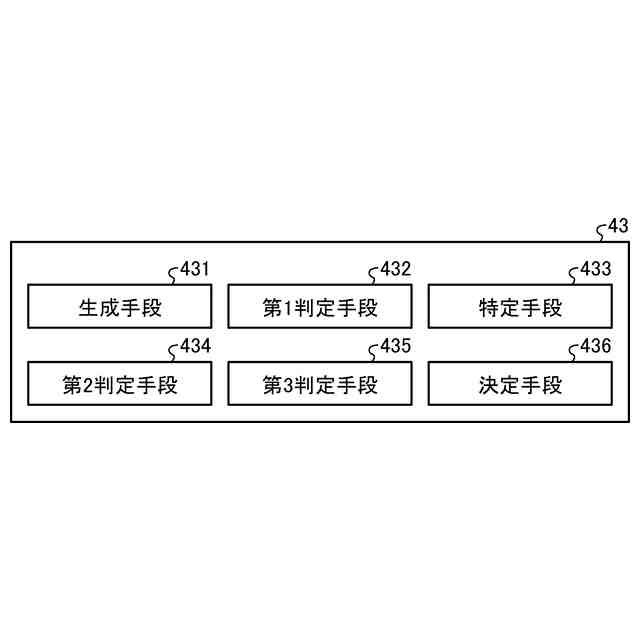
上述した課題を解決し、目的を達成するために、本発明に係る車両制御装置は、自車両の周囲の特徴点の点群である周囲点群を検知する測距センサを備える車両制御装置であって、測距センサにより検知された周囲点群を示す周囲点群情報に基づいて、周囲点群を所定の領域に区画する区画化情報を生成する生成手段と、区画化情報の所定の領域において、周囲点群が存在する割合が所定の割合を上回る場合、区画化情報に含まれる周囲点群について、自車両の周囲に存在する検出対象物標として特定する特定手段と、を備える。
【0007】
この構成によれば、車両制御装置は、測距センサにより検知された周囲点群を所定の領域に区画し、周囲点群が存在する割合が所定の割合を上回る場合、自車両の周囲に存在する検出対象物標として特定する。このため、車両制御装置は、検知された周囲点群の物標について、検知された物標の大きさに関わらず、検出対象物標として特定することができる。また、車両制御装置は、検知された物標が人と同じ高さの街路樹の場合でも、街路樹と人とを区別し、検出対象物標として特定することができる。したがって、車両制御装置は、従来に比して、検知した点群データから車両の周辺に存在する物標を検出することができる。
【0008】
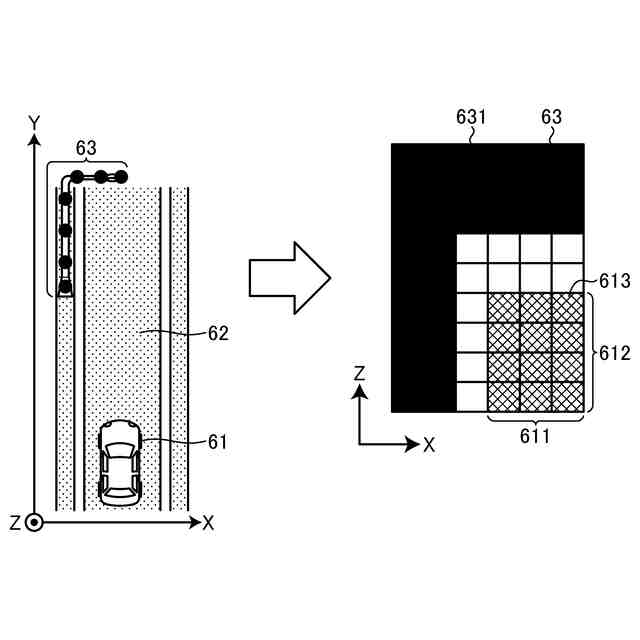
また、周囲点群は、自車両の位置を原点とする3軸の直交座標系に位置し、生成手段は、3軸の直交座標系における3次元座標に位置する周囲点群について、3軸の直交座標系のうち、自車両が進行する車両進行方向の座標軸を削除し、自車両の位置を原点とする2軸の直交座標系に対応した2次元座標に変換し、区画化情報を生成する。これにより、車両制御装置は、3軸の直交座標系に周囲点群の座標系について、3次元座標から2次元座標に変換する。このため、車両制御装置は、従来に比して、検知した点群データから車両の周辺に存在する物標を判断するための処理時間を低減することができる。
【0009】
さらに、車両制御装置は、検出対象物標の特徴点が、車両進行方向に存在し、かつ、自車両の車幅及び自車両の高さから設定される自車両領域の中に存在する場合、自車両の障害物であると決定する決定手段を備え、決定手段は、検出対象物標の特徴点が、車両進行方向に存在し、かつ、自車両領域の中に存在しない場合、自車両の障害物ではないと決定する。また、所定の割合は、5割である。これにより、例えば、車両制御装置は、検出対象物標が自車系路外の道路構造物の場合、検出対象物標の一部が自車経路上に重なった場合でも、自車両領域の中に存在しない物標は障害物でないと決定する。したがって、車両制御装置は、自車両の周りに存在する物標の誤検出により車両の誤停止に繋がる可能性を低減することができる。
【発明の効果】
【0010】
本発明によれば、従来に比して、検知した点群データから車両の周辺に存在する物標を検出することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
3か月前
個人
警告装置
1か月前
個人
車窓用防虫網戸
10日前
個人
小型EVシステム
1か月前
日本精機株式会社
ケース
1か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
照明装置
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
個人
ワイパーゴム性能保持具
2日前
株式会社松華
懸架装置
2か月前
個人
ブレーキシステム
1か月前
横浜ゴム株式会社
タイヤ
1か月前
個人
ステージカー
2か月前
株式会社クラベ
ヒータユニット
8日前
個人
自動車ドア開度規制ベルト
1か月前
個人
自走式立体型洗車場
2か月前
井関農機株式会社
収穫作業車両
9日前
株式会社ユーシン
照明装置
21日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
10日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
マツダ株式会社
車両
2か月前
マツダ株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
4日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
1か月前
株式会社ユーシン
照明装置
1か月前
帝国繊維株式会社
作業車両
1か月前
日本精機株式会社
車両用照明装置
3か月前
エムケー精工株式会社
車両処理装置
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ