TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025077559
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023189840
出願日
2023-11-07
発明の名称
ハンド部、対象物把持装置およびハンド部組立用シート
出願人
東京都公立大学法人
代理人
個人
主分類
B25J
15/08 20060101AFI20250512BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物を両側から挟み込む従来の構成に比べて、曲面状の外表面を有する対象物でも安定して把持すること。
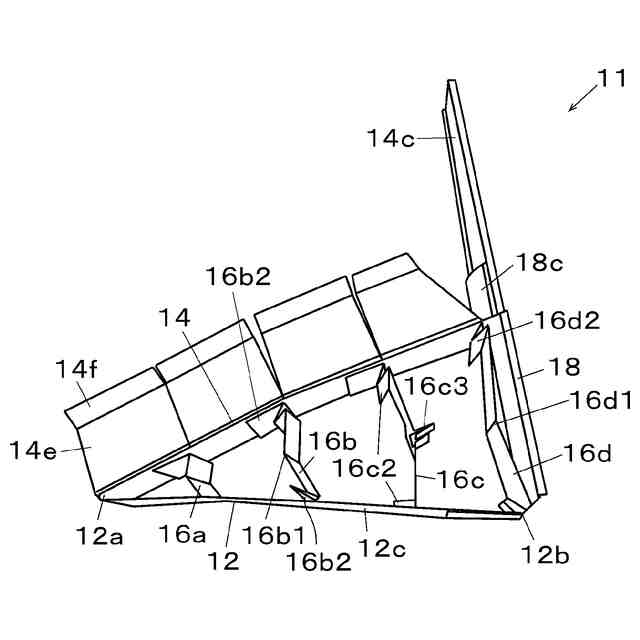
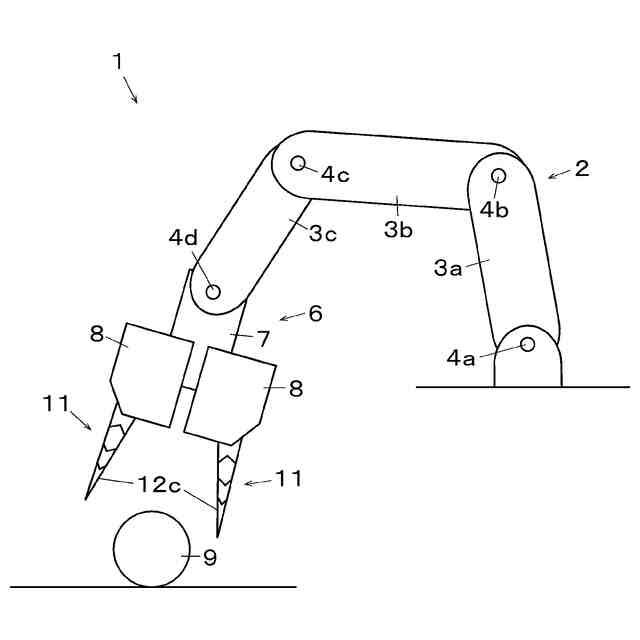
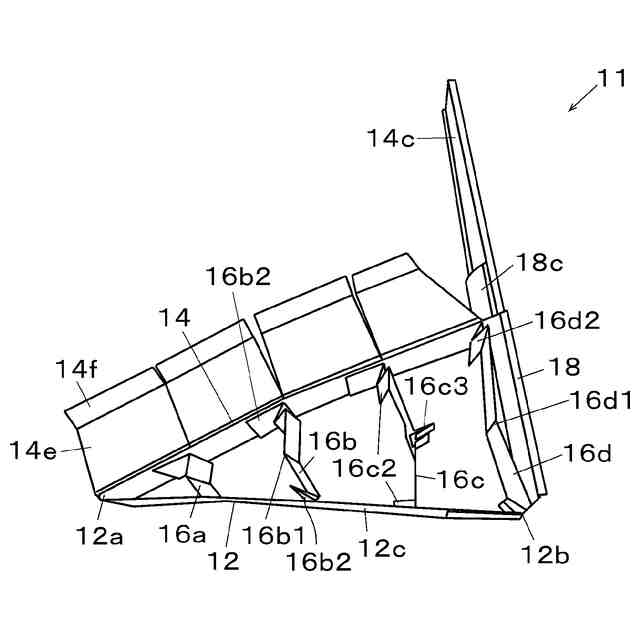
【解決手段】対象物(9)に接触する把持部(12)と、把持部(12)の一端部(12a)に一端部(14a)が連結された第1のリンク部(14)と、第1のリンク部(14)と把持部(12)とを離間する方向に付勢する複数の節部(16)と、第1のリンク部(14)の他端部(14b)と把持部(12)の他端部(12b)とが連結されると共に対象物把持装置(1)の先端部に支持される被支持部(18)と、を備えたことを特徴とするハンド部(11)。
【選択図】図2
特許請求の範囲
【請求項1】
対象物に接触する接触面を有する把持部と、
前記把持部の一端部に一端部が連結された第1のリンク部と、
前記第1のリンク部と前記把持部との間に支持され、前記第1のリンク部と前記把持部とを離間する方向に付勢する複数の節部と、
前記第1のリンク部の他端部と前記把持部の他端部とが連結されると共に対象物把持装置の先端部に支持される被支持部と、
を備えたことを特徴とするハンド部。
続きを表示(約 1,000 文字)
【請求項2】
前記各節部に設けられた折り曲げ部、
を備え、
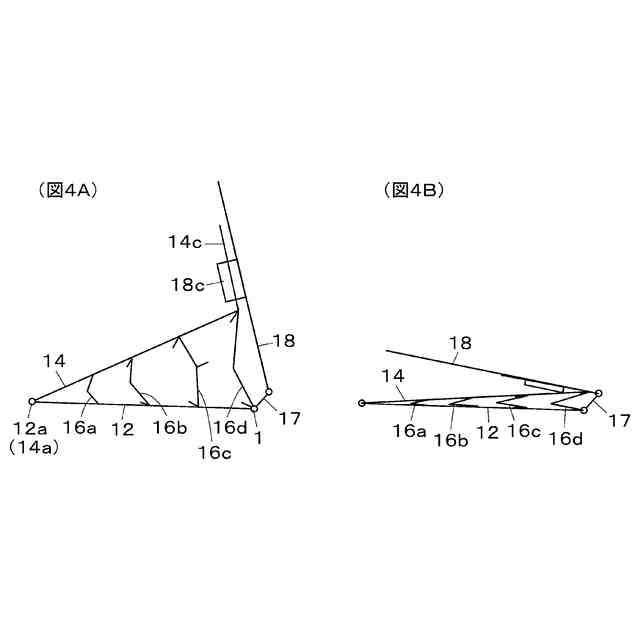
前記把持部と前記第1のリンク部との連結部分と、前記第1のリンク部と前記被支持部との連結部分と、前記各節部と前記把持部との連結部分と、前記各節部と前記第1のリンク部との連結部分と、前記折り曲げ部と、で折り曲げて、前記第1のリンク部と前記把持部とが対向し且つ近接すると共に前記被支持部と前記把持部とが前記第1のリンク部を挟んで対向し且つ近接する折り畳み状態と、前記把持部と前記第1のリンク部と前記被支持部とが離間した展開状態との間で変形可能である
ことを特徴とする請求項1に記載のハンド部。
【請求項3】
前記把持部、前記第1のリンク部、前記節部および前記被支持部が、1枚のシートを折り曲げて形成された
ことを特徴とする請求項2に記載のハンド部。
【請求項4】
前記節部が、シートの弾性復元力で前記折り畳み状態から展開状態に向けて移行する力を作用させるバネ性を有する前記ハンド部、
を備えたことを特徴とする請求項3に記載のハンド部。
【請求項5】
対象物に接触する接触面を有する把持部と、前記把持部の一端部に一端部が連結された第1のリンク部と、前記第1のリンク部と前記把持部との間に支持され、前記第1のリンク部と前記把持部とを離間する方向に付勢する複数の節部と、前記第1のリンク部の他端部と前記把持部の他端部とが連結された被支持部と、を有するハンド部と、
前記被支持部を支持するソケット部を先端部に有し、対象物に対して前記ハンド部を接近、離間する方向に移動させるアーム部と、
を備えたことを特徴とする対象物把持装置。
【請求項6】
対象物に接触するハンド部を折り曲げて組み立てるハンド部組立用シートであって、
前記対象物に接触する接触面を有する把持部と、
前記把持部の一端部に一端部が連結された第1のリンク部と、
前記第1のリンク部と前記把持部との間に支持され、前記第1のリンク部と前記把持部とを離間する方向に付勢する複数の節部と、
前記第1のリンク部の他端部と前記把持部の他端部とが連結されると共に対象物把持装置の先端部に支持される被支持部と、
を備えたことを特徴とするハンド部組立用シート。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物を把持するハンド部や、前記ハンド部が先端部に配置されて対象物を把持する対象物把持装置、およびハンド部を組み立てるためのハンド部組立用シートに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
コンビニエンスストアやスーパーマーケット等の商品陳列棚に陳列される物品を移動させたり、工場で生産された製品等の対象物を把持して移動させたり、医療現場で除菌済みの用具や感染の恐れのある物品や生体試料等を移動させたりするロボットアームやマニピュレータなどとも呼ばれる対象物把持装置に関し、下記の特許文献1に記載の技術が公知である。
【0003】
特許文献1(特開2021-094642号公報)には、一対の把持部材(106)で対象物を把持する対象物把持装置(100)において、各把持部材(106)を接近、離間させる方向に移動させて、対象物を把持部材(106)で両側から挟んで(把持して)、持ち上げて、移動させる構成が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-094642号公報(「0033」-「0035」、「0040」、図8-図11)
【発明の概要】
【発明が解決しようとする課題】
【0005】
(従来技術の問題点)
特許文献1に記載の技術では、対象物が対称な形状のように2つの平行な側面を有する構成であれば問題がないが、コーヒー缶や注射器のような円筒状の物体や球状の物体のように曲面状の外表面を有する物体を把持する場合、接触面積が小さくなる。したがって、把持が不安定になり、対象物を移動中に脱落、落下等しやすくなる問題がある。
特に、対象物把持装置が使用される状況、分野として、食品や医薬品、医療分野等の衛生面で注意が必要な場合がある。このような分野では、衛生環境を保つために、対象物が落下することは特に好ましくない。
また、衛生面で注意が必要な分野では、対象物に直接接触する部分(ハンド部)が使い捨てであることが好ましい場合がある。使い捨ての構成の場合、ハンド部が高価であると、高価なハンド部を使い捨てにすると費用が嵩む問題もある。
【0006】
本発明は、対象物を両側から挟み込む従来の構成に比べて、曲面状の外表面を有する対象物でも安定して把持することを技術的課題とする。
【課題を解決するための手段】
【0007】
前記技術的課題を解決するために、請求項1に記載の発明のハンド部は、
対象物に接触する接触面を有する把持部と、
前記把持部の一端部に一端部が連結された第1のリンク部と、
前記第1のリンク部と前記把持部との間に支持され、前記第1のリンク部と前記把持部とを離間する方向に付勢する複数の節部と、
前記第1のリンク部の他端部と前記把持部の他端部とが連結されると共に対象物把持装置の先端部に支持される被支持部と、
を備えたことを特徴とする。
【0008】
請求項2に記載の発明は、請求項1に記載のハンド部において、
前記各節部に設けられた折り曲げ部、
を備え、
前記把持部と前記第1のリンク部との連結部分と、前記第1のリンク部と前記被支持部との連結部分と、前記各節部と前記把持部との連結部分と、前記各節部と前記第1のリンク部との連結部分と、前記折り曲げ部と、で折り曲げて、前記第1のリンク部と前記把持部とが対向し且つ近接すると共に前記被支持部と前記把持部とが前記第1のリンク部を挟んで対向し且つ近接する折り畳み状態と、前記把持部と前記第1のリンク部と前記被支持部とが離間した展開状態との間で変形可能である
ことを特徴とする。
【0009】
請求項3に記載の発明は、請求項2に記載のハンド部において、
前記把持部、前記第1のリンク部、前記節部および前記被支持部が、1枚のシートを折り曲げて形成された
ことを特徴とする。
【0010】
請求項4に記載の発明は、請求項3に記載のハンド部において、
前記節部が、シートの弾性復元力で前記折り畳み状態から展開状態に向けて移行する力を作用させるバネ性を有する前記ハンド部、
を備えたことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東京都公立大学法人
動作支援用具
1か月前
東京都公立大学法人
酵素含有組成物
6日前
東京都公立大学法人
キチン系複合体
2か月前
東京都公立大学法人
電極活物質とその製造方法、および二次電池
25日前
東京都公立大学法人
反応装置及びそれを用いた化合物の製造方法
1か月前
東京都公立大学法人
胸郭運動計測装置及び胸郭運動計測プログラム
26日前
東京都公立大学法人
耐熱合金
1か月前
東京都公立大学法人
細胞判定方法、スクリーニング方法、細胞分離方法及びゲル
27日前
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
今日
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
13日前
CKD株式会社
把持装置
1か月前
株式会社竹中工務店
補助セット
12日前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
12日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ハンド
4日前
SMC株式会社
着脱装置
1か月前
株式会社ミクロブ
把持装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
日本精工株式会社
締結用工具
1か月前
トヨタ自動車株式会社
ロボット
7日前
株式会社不二越
移動ロボットシステム
15日前
ARMA株式会社
ジョイントフレーム
1か月前
工機ホールディングス株式会社
作業機
4日前
本田技研工業株式会社
装置
18日前
川崎重工業株式会社
塗装システム
4日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
25日前
トヨタ自動車株式会社
歩行ロボット
1か月前
株式会社不二越
垂直多関節ロボット
26日前
トヨタ自動車株式会社
軌道生成装置
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ