TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076603
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188259
出願日
2023-11-02
発明の名称
立体物印刷システム、立体物印刷システムの制御方法および立体物印刷装置
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250509BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ユーザーの負担を低減しつつ、立体的なワークに対する印刷品質を高める。
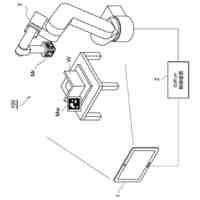
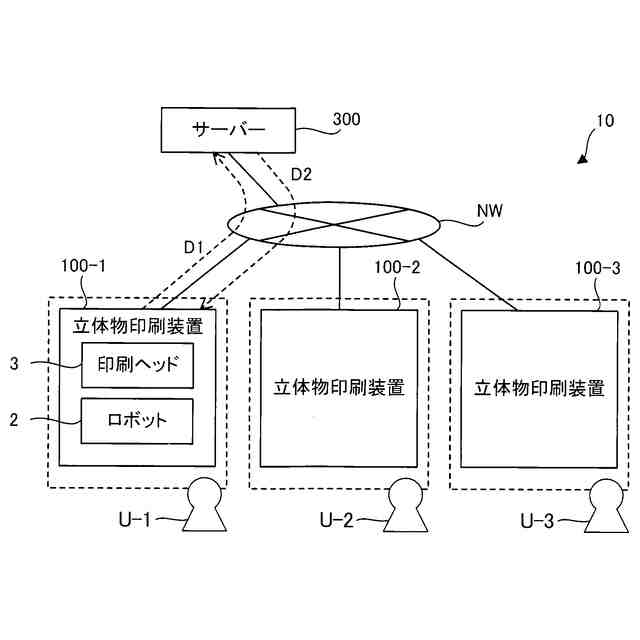
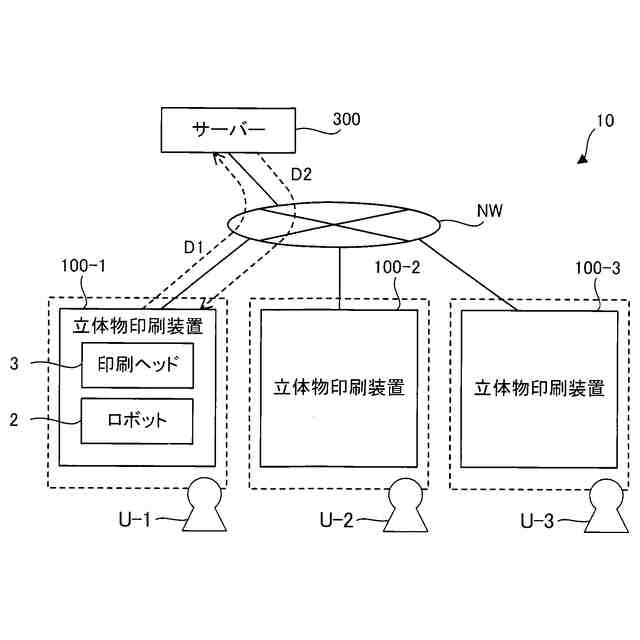
【解決手段】立体物印刷システムは、立体的なワークに向けて液体を吐出する印刷ヘッドと、印刷ヘッドを保持するロボットと、を備える立体物印刷装置と、立体物印刷装置に通信可能に接続されるサーバーと、を備え、サーバーは、ワークに関するワーク情報を取得し、ワーク情報に基づいて、ワークに対して印刷ヘッドの移動する経路である印刷経路を生成する。
【選択図】図1
特許請求の範囲
【請求項1】
立体的なワークに向けて液体を吐出する印刷ヘッドと、前記印刷ヘッドを保持するロボットと、を備える立体物印刷装置と、
前記立体物印刷装置に通信可能に接続されるサーバーと、を備える立体物印刷システムであって、
前記サーバーは、
前記ワークに関するワーク情報を取得し、
前記ワーク情報に基づいて、前記ワークに対して前記印刷ヘッドの移動する経路である印刷経路を生成する、
ことを特徴とする立体物印刷システム。
続きを表示(約 1,300 文字)
【請求項2】
前記サーバーは、
前記ロボットに関するロボット情報を取得し、
前記ロボット情報に基づいて前記印刷経路を補正する、
ことを特徴とする請求項1に記載の立体物印刷システム。
【請求項3】
前記ロボット情報は、前記ロボットを識別するための個体情報と、前記ロボットの性能に関する性能情報と、を含み、
前記サーバーは、
前記ロボット情報を記憶する記憶部を備え、
前記ロボット情報に基づいて前記印刷経路を補正する、
ことを特徴とする請求項2に記載の立体物印刷システム。
【請求項4】
前記立体物印刷装置は、前記ロボットの動作を検知する動作検知部を備え、
前記サーバーは、
前記ロボットの動作に関する動作情報を前記動作検知部から取得し、
前記動作情報に基づいて前記印刷経路を補正する、
ことを特徴とする請求項1に記載の立体物印刷システム。
【請求項5】
前記サーバーは、前記立体物印刷装置が印刷している期間中に前記動作検知部から前記動作情報を取得する、
ことを特徴とする請求項4に記載の立体物印刷システム。
【請求項6】
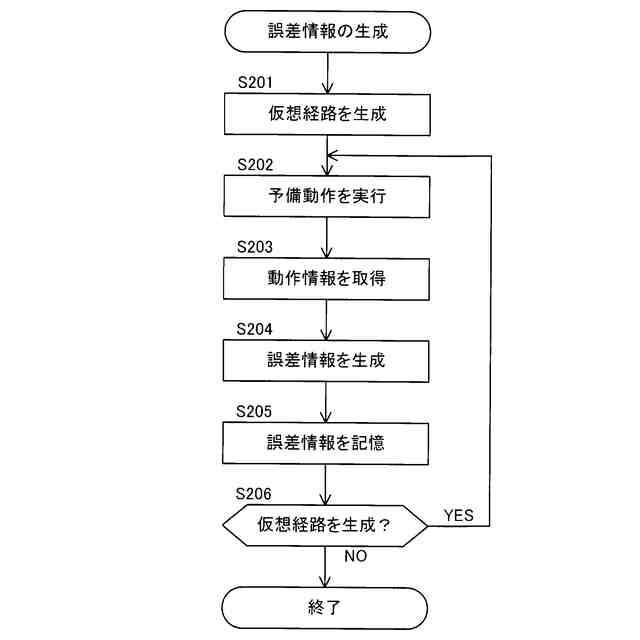
前記立体物印刷装置は、前記印刷ヘッドから液体を吐出させることなく、前記印刷ヘッドを前記印刷経路に沿って移動させる予備動作を実行し、
前記サーバーは、前記予備動作の実行期間中における前記動作検知部の検知による前記動作情報を取得する、
ことを特徴とする請求項4に記載の立体物印刷システム。
【請求項7】
前記サーバーは、
前記動作情報を記憶する記憶部を備え、
前記動作情報に基づいて前記ロボットの動作の経時変化を算出し、
前記経時変化に基づいて前記印刷経路を補正する、
ことを特徴とする請求項4に記載の立体物印刷システム。
【請求項8】
前記サーバーは、
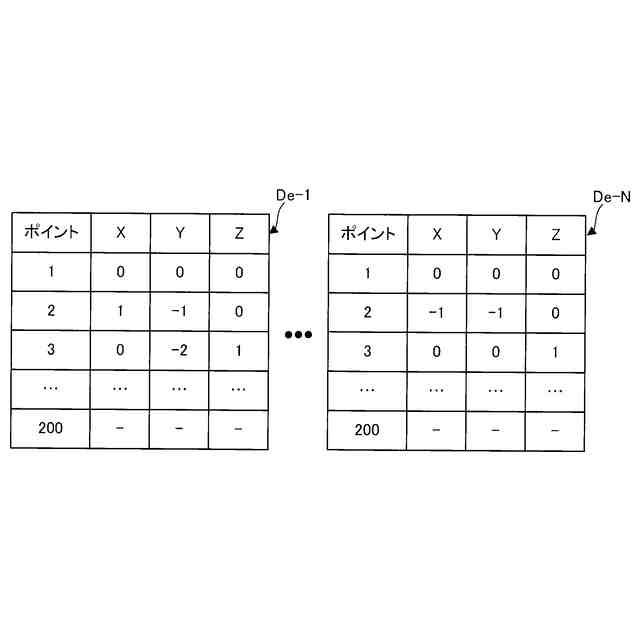
前記印刷ヘッドを仮想経路に沿って移動させる際の前記ロボットの動作の誤差に関する誤差情報を記憶する記憶部を備え、
前記誤差情報に基づいて前記印刷経路を補正する、
ことを特徴とする請求項1に記載の立体物印刷システム。
【請求項9】
前記サーバーは、
前記印刷経路が前記仮想経路と一致するか否かを判定し、
前記印刷経路が前記仮想経路と一致すると判定した場合、前記仮想経路に対応する前記誤差情報に基づいて前記印刷経路を補正する、
ことを特徴とする請求項8に記載の立体物印刷システム。
【請求項10】
前記立体物印刷装置は、前記ロボットの動作を検知する動作検知部を備え、
前記サーバーは、
前記印刷経路が前記仮想経路と一致しないと判定した場合、
前記ロボットの動作に関する動作情報を前記動作検知部から取得し、
前記動作情報に基づいて前記印刷経路を補正する、
ことを特徴とする請求項8に記載の立体物印刷システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、立体物印刷システム、立体物印刷システムの制御方法および立体物印刷装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ロボットを用いて立体的なワークの表面にインクジェット方式により印刷を行う立体物印刷装置は、例えば、特許文献1に開示されるように、印刷ヘッドを保持するロボットを用いて3次元の物体の表面に対して印刷を行う。
【先行技術文献】
【特許文献】
【0003】
特開2014-111307号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前述のような立体物印刷装置では、印刷ヘッドを保持するロボットの動作や誤差が印刷ヘッドの移動する経路である印刷経路の精度に影響し、印刷経路の精度が印刷品質に影響する。しかし、印刷ヘッドを保持するロボットの動作や誤差を考慮して適切な印刷経路を生成することは立体物印刷装置のユーザーにとって負担が大きい。
【課題を解決するための手段】
【0005】
以上の課題を解決するために、本開示の立体物印刷システムの一態様は、立体的なワークに向けて液体を吐出する印刷ヘッドと、前記印刷ヘッドを保持するロボットと、を備える立体物印刷装置と、前記立体物印刷装置に通信可能に接続されるサーバーと、を備える立体物印刷システムであって、前記サーバーは、前記ワークに関するワーク情報を取得し、前記ワーク情報に基づいて、前記ワークに対して前記印刷ヘッドの移動する経路である印刷経路を生成する。
【0006】
本開示の立体物印刷システムの制御方法の一態様は、立体的なワークに向けて液体を吐出する印刷ヘッドと、前記印刷ヘッドを保持するロボットと、を備える立体物印刷装置と、前記立体物印刷装置に通信可能に接続されるサーバーと、を備える立体物印刷システムの制御方法であって、前記ワークに関するワーク情報を取得するワーク情報取得工程と、前記ワーク情報に基づいて、前記ワークに対して前記印刷ヘッドの移動する経路である印刷経路を生成する経路生成工程と、を含む。
【0007】
本開示の立体物印刷装置の一態様は、立体的なワークに向けて液体を吐出する印刷ヘッドと、前記印刷ヘッドを保持するロボットと、サーバーと通信可能に接続される制御部と、を備え、前記制御部は、前記ワークに関するワーク情報を前記サーバーに送信し、前記ワークに対して前記印刷ヘッドが移動する経路である印刷経路を前記サーバーから受信する。
【0008】
本開示の立体物印刷システムの他の一態様は、立体的なワークに向けて液体を吐出する印刷ヘッドと、前記印刷ヘッドを保持するロボットと、前記ロボットの動作を検知する動作検知部と、を備える立体物印刷装置と、前記立体物印刷装置に通信可能に接続されるサーバーと、を備える立体物印刷システムであって、前記サーバーは、前記動作検知部から前記印刷ヘッドの変位に関する変位情報を取得し、前記変位情報に基づいて、前記印刷ヘッドの吐出タイミングを補正する。
【図面の簡単な説明】
【0009】
第1実施形態に係る立体物印刷システムの構成例を示す概略図である。
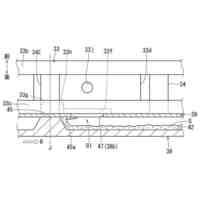
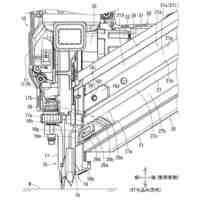
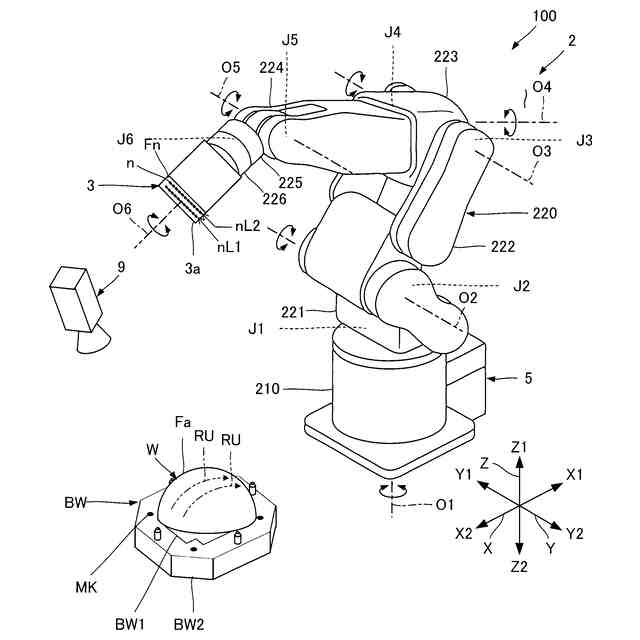
第1実施形態に係る立体物印刷装置の概略を示す斜視図である。
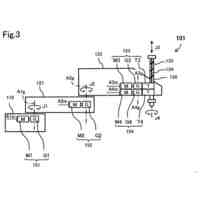
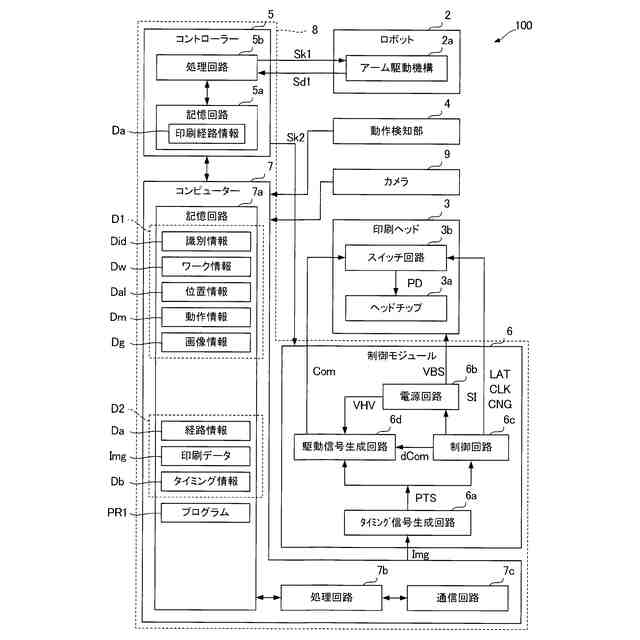
第1実施形態に係る立体物印刷装置の電気的な構成を示すブロック図である。
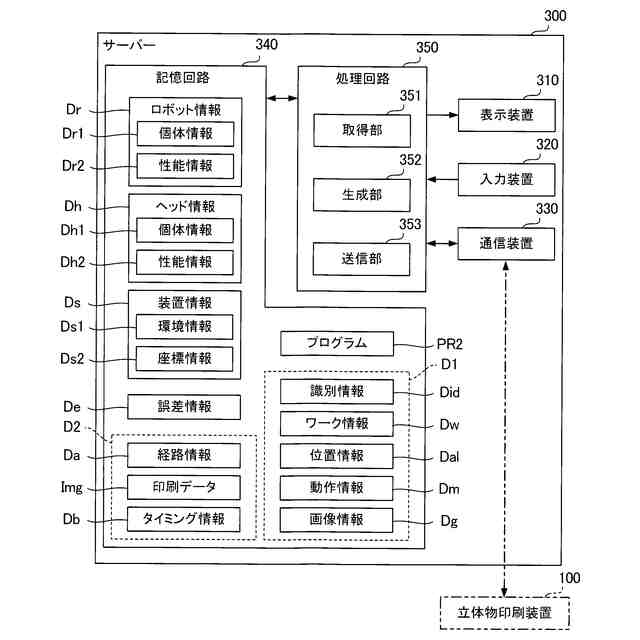
第1実施形態に係る立体物印刷システムに用いるサーバーの構成例を示す概略図である。
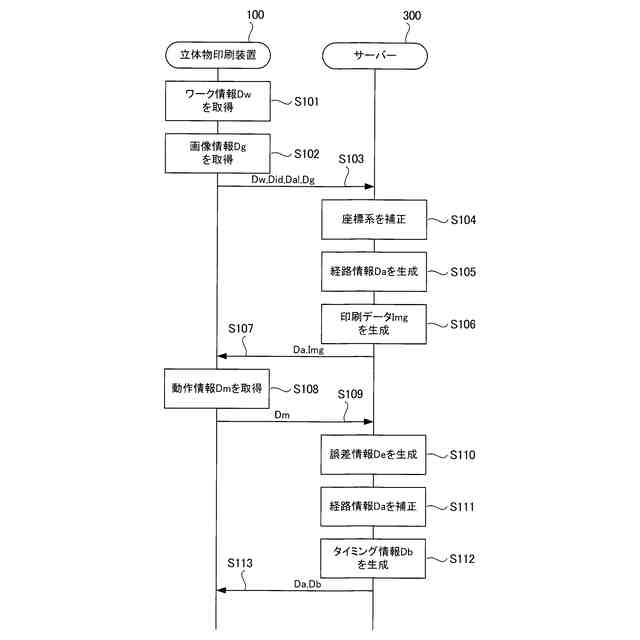
第1実施形態に係る立体物印刷システムの制御方法を示すフローチャートである。
ワーク情報および画像情報の取得を説明するための図である。
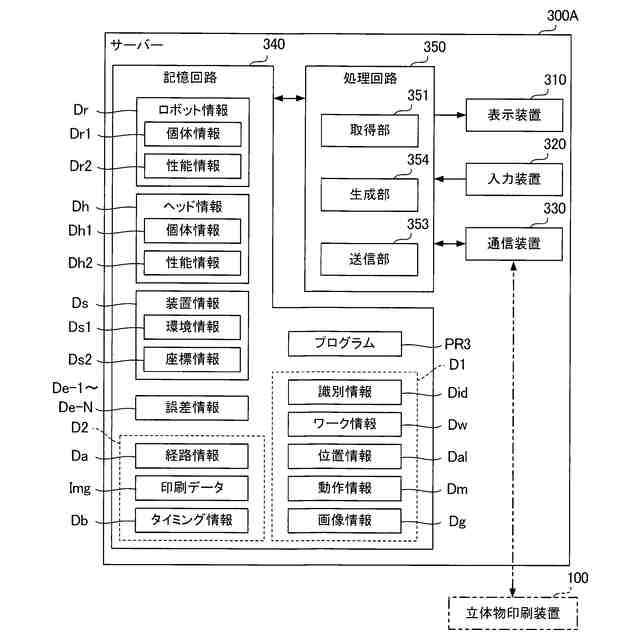
第2実施形態に係る立体物印刷システムに用いるサーバーの構成例を示す概略図である。
第2実施形態における誤差情報の生成を示すフローチャートである。
仮想経路ごとの誤差情報を説明するための図である。
第2実施形態における印刷経路の補正を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら本開示に係る好適な実施形態を説明する。なお、図面において各部の寸法および縮尺は実際と適宜に異なり、理解を容易にするために模式的に示している部分もある。また、本開示の範囲は、以下の説明において特に本開示を限定する旨の記載がない限り、これらの形態に限られない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
株式会社ダイヘン
移動体
3日前
トヨタ自動車株式会社
関節機構
5日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
14日前
学校法人五島育英会
アーム機構
5日前
住友重機械工業株式会社
ロボット
25日前
株式会社PILLAR
チューブ保持治具
10日前
庄内機械株式会社
釘打装置
18日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社アイエイアイ
グリッパー
20日前
川崎重工業株式会社
制動システム
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
13日前
株式会社マキタ
電動作業機
6日前
株式会社マキタ
電動作業機
6日前
芝浦機械株式会社
双腕ロボット
24日前
トヨタ自動車東日本株式会社
搬送治具
18日前
株式会社リコー
多関節ロボット
4日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車株式会社
荷姿影響緩和方法
21日前
株式会社ダイヘン
ロボット制御システム
3日前
パナソニック株式会社
工具
1か月前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
1か月前
住友重機械工業株式会社
ロボット及びカバー
25日前
個人
回転移動式工具ホルダ
12日前
アピュアン株式会社
エアー式衝撃工具
1か月前
株式会社マキタ
電動工具
18日前
株式会社ダイヘン
端末装置
18日前
株式会社マキタ
打ち込み工具
18日前
株式会社マキタ
打ち込み工具
18日前
セイコーエプソン株式会社
多関節ロボット
3日前
株式会社マキタ
打ち込み工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ