TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025076592
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188234
出願日
2023-11-02
発明の名称
車両走行制御システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
B60W
30/10 20060101AFI20250509BHJP(車両一般)
要約
【課題】 自律走行車両を曲がり角において適切に旋回させるための車両走行制御システムを提供する。
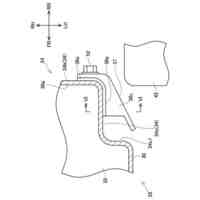
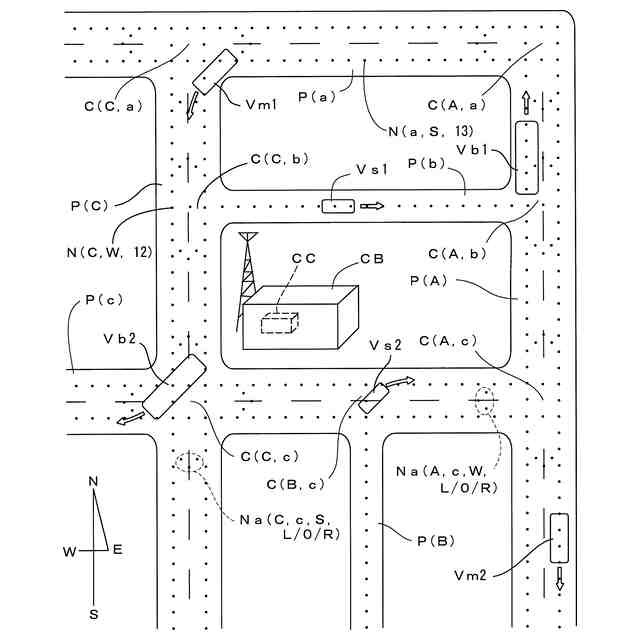
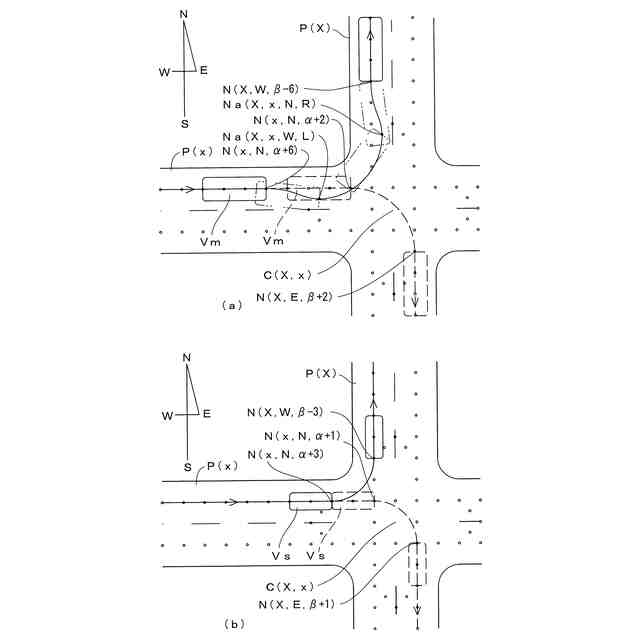
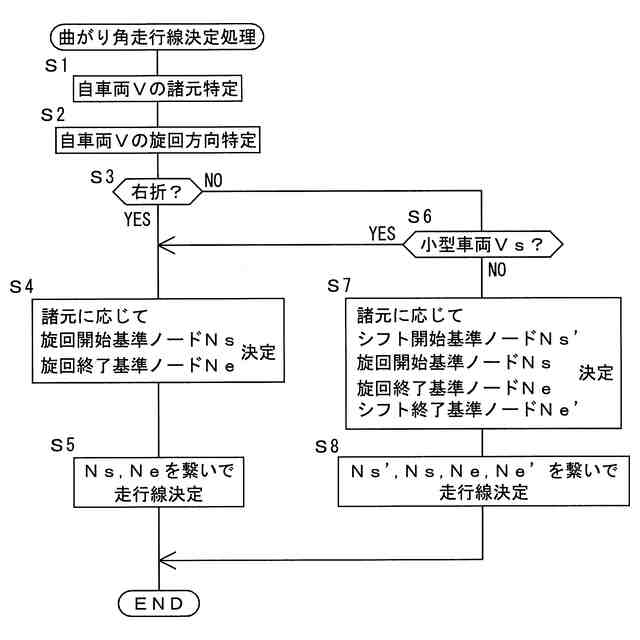
【解決手段】 走行経路における曲がり角C(X,x)を車両Vb,Vm,Vsが旋回して走行する際に、車両が走行すべき走行線を、当該車両の諸元(例えば、旋回半径)に依拠して決定し、当該車両を、その走行線に沿って旋回させる。具体的には、曲がり角に複数のノードNを設定し、車両の諸元に依拠して、それら複数のノードから、車両が旋回を開始するための基準となる旋回開始基準ノードと、車両が旋回を終了するための基準となる旋回終了基準ノードとを選択し、それら旋回開始基準ノードと旋回終了基準ノードとを繋ぐ円弧状の走行線を決定する。
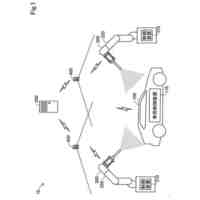
【選択図】 図3
特許請求の範囲
【請求項1】
車両に搭載されて当該車両の走行を制御する走行制御装置を含んで構成される車両走行制御システムであって、
走行経路における曲がり角を車両が旋回して走行する際に、当該車両が走行すべき走行線が、当該車両の諸元に依拠して決定され、前記走行制御装置が、当該車両を、その走行線に沿って旋回させるように構成された車両走行制御システム。
続きを表示(約 520 文字)
【請求項2】
車両の運行を管理する運行管理装置を含み、その運行管理装置が、走行線を決定するように構成された請求項1に記載の車両走行制御システム。
【請求項3】
前記曲がり角に複数のノードが設定されており、車両の諸元に依拠して、それら複数のノードから、車両が旋回を開始するための基準となる旋回開始基準ノードと、車両が旋回を終了するための基準となる旋回終了基準ノードとが選択され、それら旋回開始基準ノードと旋回終了基準ノードとを繋ぐ円弧状の走行線が決定されるように構成された請求項1に記載の車両走行制御システム。
【請求項4】
走行経路が、自車線と対向車線とからなる双方向通路を含んでおり、前記曲がり角が、その双方向通路から他の通路への曲がり角、若しくは、他の通路からその双方向通路への曲がり角である場合、車両の諸元によっては、車両が対向車線にはみ出すような走行線が決定されるように構成された請求項1に記載の車両走行制御システム。
【請求項5】
走行線の決定において依拠される車両の諸元に、当該車両の旋回半径が含まれる請求項1ないし請求項4のいずれか1つに記載の車両走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の走行、特に、車両の旋回走行を制御するための車両走行制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
人の操作によらずに走行する車両(以下、「自律走行車両」という場合がある)の走行制御に関して、下記特許文献に記載されたような技術が存在する。その技術では、車両が走行する経路にノードが設定され、車両は、そのノードを辿るようにして、走行する。
【先行技術文献】
【特許文献】
【0003】
特開2023-55228号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両は、自身の諸元によって、走行可能な走行線が異なる。具体的に言えば、例えば、車両の長さ等によって、曲がり角を旋回するときの走行線は異なる。上記特許文献に記載されている技術では、車両の諸元の相違についての記載はなく、車両の諸元の相違に配慮することで、自律走行車両の走行制御が実用的なものとなる。本発明は、そのような実情に鑑みてなされたものであり、実用性の高い車両走行制御システムを提供することを課題とする。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明の車両走行制御システムは、
車両に搭載されて当該車両の走行を制御する走行制御装置を含んで構成される車両走行制御システムであって、
走行経路における曲がり角を車両が旋回して走行する際に、当該車両が走行すべき走行線が、当該車両の諸元に依拠して決定され、前記走行制御装置が、当該車両を、その走行線に沿って旋回させるように構成される。
【発明の効果】
【0006】
本発明の車両走行制御システム(以下、「本車両走行制御システム」若しくは「本システム」と略す場合がある)によれば、車両は、自身の諸元の如何に拘わらず、走行経路における曲がり角を適切に旋回することが可能となる。
【発明の概要】
発明の態様
【0007】
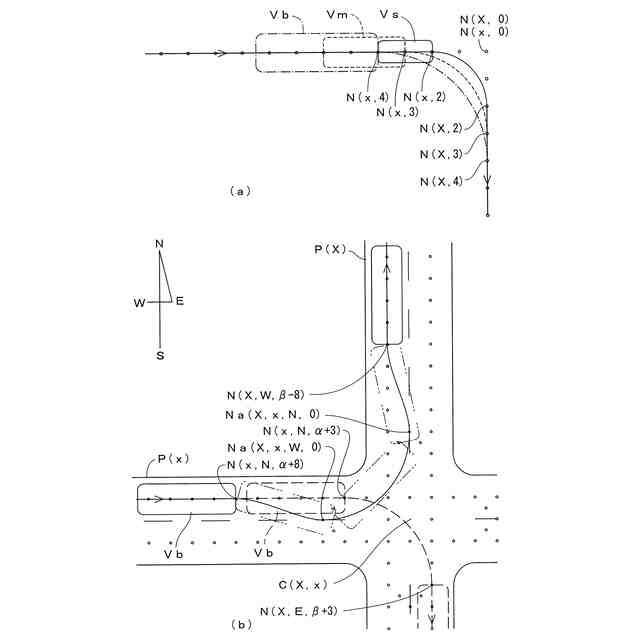
本システムが適用される車両が走行する走行領域は、例えば、街や、事業所等、車両が走行する通路が配設されている領域である。そして、例えば、それら通路のいくつかを巡るようにして、その車両の走行経路が設定される。本システムにおける「走行線」とは、走行経路において、例えば、車両の特定点(例えば、車両重心点,車両の前端の中央点等)がそれに沿って移動する線、特定点が描く軌跡等を意味し、車両が走行すべき走行線とは、車両の走行において目標となる走行線、すなわち、目標線と考えることができる。
【0008】
車両が適正に旋回するときの走行線は、車両の諸元において異なる。ここで、「車両の諸元」とは、車両のサイズ(長さ,幅等),ホイールベース,トレッドや、旋回時の内輪差,外輪差,適正車速,旋回半径等が含まれる。旋回時の走行線の決定において依拠される車両の諸元には、特に、旋回半径が含まれることが望ましい。その旋回半径は、最小旋回半径,設定適正旋回半径等、種々の旋回半径の中から適切なものを採用すればよい。ちなみに、車両の諸元によっては、詳しくは、車両のサイズが大きいときや、旋回半径が大きいとき等には、その車両が走行することのできない曲がり角も存在し得る。
【0009】
走行経路における「曲がり角」は、1つの通路が折れ曲がっているところの折れ曲がり箇所だけを意味するのではなく、1つの通路の長さ方向の中間部に他の通路の端部が連結する箇所(いわゆるT字路)や、2つの通路が互い交差する箇所(いわゆる交差点)等、車両が旋回して走行しなければならない箇所が広く含まれる。
【0010】
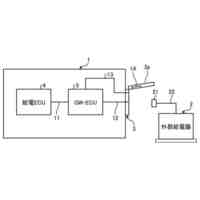
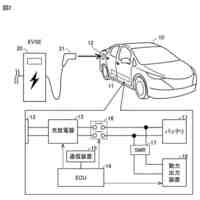
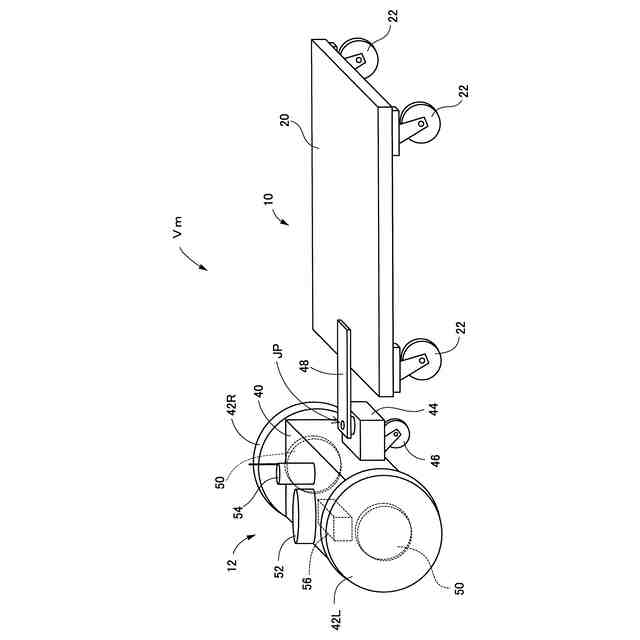
走行制御の対象となる車両は、自律走行する車両であることが望ましく、「走行制御装置」は、その自律走行を実現するためのコントローラと考えることができる。車両には、駆動装置,制動装置,ステアリング装置等、走行に関する種々の装置が存在し、走行制御装置は、それらの装置を制御するように構成することができる。また、自律走行を実現するためには、車両が、GPS機能,ビーコン検知機能等、走行領域における自身の位置を特定する機能を有することが望ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
方法
15日前
トヨタ自動車株式会社
車両
29日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
方法
18日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
金型
2日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
充電器
23日前
トヨタ自動車株式会社
電動車
14日前
トヨタ自動車株式会社
ロータ
29日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
自動車
22日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
組電池
18日前
トヨタ自動車株式会社
電源装置
4日前
トヨタ自動車株式会社
制御装置
22日前
トヨタ自動車株式会社
集合導線
3日前
トヨタ自動車株式会社
二次電池
2日前
トヨタ自動車株式会社
配車装置
14日前
トヨタ自動車株式会社
ステータ
1日前
トヨタ自動車株式会社
判定装置
24日前
トヨタ自動車株式会社
触媒装置
14日前
トヨタ自動車株式会社
ステータ
2日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
電源装置
14日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
ステータ
2日前
トヨタ自動車株式会社
電動車両
23日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ