TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025075325
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186397
出願日
2023-10-31
発明の名称
車両運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/09 20120101AFI20250508BHJP(車両一般)
要約
【課題】自車両がガードレール及び側壁等の連続構造物に衝突しないように衝突回避動作を行う。
【解決手段】運転支援ECUは、自車両HVが連続構造物の端部Peに衝突する可能性があると判定した場合、自車両と連続構造物との衝突を、自動制動のみにより回避する第1回避経路R1、順方向自動操舵により回避する第2回避経路R2及び逆方向自動操舵により回避する第3回避経路R3を演算する。運転支援ECUは、それらの回避経路のうち、衝突回避動作(自動制動、順方向自動操舵及び逆方向自動操舵の何れか)が最も遅く開始される回避経路を、最終的な衝突回避経路として選択する。
【選択図】図2
特許請求の範囲
【請求項1】
自車両の進行方向の所定領域に障害物が存在している場合に衝突回避動作を行って前記自車両と前記障害物との衝突を回避する車両運転支援装置であって、
前記障害物が連続構造物であり且つ前記自車両が前記連続構造物の前記自車両の側の端部に衝突する可能性があると判定したとき、
前記衝突回避動作として前記自車両に制動力を付与する自動制動を実行して前記自車両を前記端部の手前で停止させることにより前記自車両と前記連続構造物との衝突を回避する第1回避経路に従って前記自車両を走行させた場合における前記自動制動の開始時刻である第1時刻を算出し、
前記衝突回避動作として自動操舵を実行して前記自車両の進行方向を変化させて前記自車両を前記連続構造物の前記自車両側の領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第2回避経路を算出し、前記第2回避経路に従って前記自車両を走行させるための前記自動操舵の開始時刻である第2時刻を算出し、
前記衝突回避動作として自動操舵を実行して前記自車両を前記連続構造物の長手方向と交差するように前記連続構造物の前記端部の側方の領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第3回避経路を算出し、前記第3回避経路に従って前記自車両を走行させるための前記自動操舵の開始時刻である第3時刻を算出し、
前記第1時刻、前記第2時刻及び前記第3時刻のうちの最も遅い時刻に対応する前記第1回避経路、前記第2回避経路及び前記第3回避経路のうちの一つを衝突回避経路として選択するとともに、前記最も遅い時刻にて前記選択された衝突回避経路に対応する前記衝突回避動作を開始する、
車両運転支援装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の車両運転支援装置であって、
前記第2回避経路に従って前記自車両を走行させた場合に前記自車両が前記連続構造物との衝突を回避した時点以降において前記自車両が他の障害物と衝突することなく停車可能な停車スペースが存在していない場合、前記第2回避経路を前記衝突回避経路として選択しない、
車両運転支援装置。
【請求項3】
請求項1又は請求項2に記載の車両運転支援装置であって、
前記第3回避経路に従って前記自車両を走行させた場合に前記自車両が前記連続構造物との衝突を回避した時点以降において前記自車両が他の障害物と衝突することなく停車可能な停車スペースが存在していない場合、前記第3回避経路を前記衝突回避経路として選択しない、
車両運転支援装置。
【請求項4】
自車両の進行方向の所定領域に障害物が存在している場合に衝突回避動作を行って前記自車両と前記障害物との衝突を回避する車両運転支援方法であって、
前記障害物が連続構造物であり且つ前記自車両が前記連続構造物の前記自車両の側の端部に衝突する可能性があるか否かを判定する第1ステップと、
前記自車両が前記連続構造物の前記自車両の側の端部に衝突する可能性があると判定した場合、
前記衝突回避動作として前記自車両に制動力を付与する自動制動を実行して前記自車両を前記端部の手前で停止させることにより前記自車両と前記連続構造物との衝突を回避する第1回避経路に従って前記自車両を走行させた場合における前記自動制動の開始時刻である第1時刻を算出し、
前記衝突回避動作として自動操舵を実行して前記自車両の進行方向を変化させて前記自車両を前記連続構造物の前記自車両側の領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第2回避経路を算出し、前記第2回避経路に従って前記自車両を走行させるための前記自動操舵の開始時刻である第2時刻を算出し、
前記衝突回避動作として自動操舵を実行して前記自車両を前記連続構造物の長手方向と交差するように前記連続構造物の前記端部の側方領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第3回避経路を算出し、前記第3回避経路に従って前記自車両を走行させるための前記自動操舵の開始時刻である第3時刻を算出する、
第2ステップと、
前記第1時刻、前記第2時刻及び前記第3時刻のうちの最も遅い時刻に対応する前記第1回避経路、前記第2回避経路及び前記第3回避経路のうちの一つを衝突回避経路として選択するとともに、前記最も遅い時刻にて前記選択された衝突回避経路に対応する前記衝突回避動作を開始する、第3ステップと、
を含む車両運転支援方法。
【請求項5】
自車両の進行方向の所定領域に障害物が存在している場合に衝突回避動作を行って前記自車両と前記障害物との衝突を回避するために前記自車両に搭載されたコンピュータに実行させるプログラムであって、
前記プログラムは前記コンピュータに、
前記障害物が連続構造物であり且つ前記自車両が前記連続構造物の前記自車両の側の端部に衝突する可能性があるか否かを判定する第1ステップと、
前記自車両が前記連続構造物の前記自車両の側の端部に衝突する可能性があると判定した場合、
前記衝突回避動作として前記自車両に制動力を付与する自動制動を実行して前記自車両を前記端部の手前で停止させることにより前記自車両と前記連続構造物との衝突を回避する第1回避経路に従って前記自車両を走行させた場合における前記自動制動の開始時刻である第1時刻を算出し、
前記衝突回避動作として自動操舵を実行して前記自車両の進行方向を変化させて前記自車両を前記連続構造物の前記自車両側の領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第2回避経路を算出し、前記第2回避経路に従って前記自車両を走行させるための前記自動操舵の開始時刻である第2時刻を算出し、
前記衝突回避動作として自動操舵を実行して前記自車両を前記連続構造物の長手方向と交差するように前記連続構造物の前記端部の側方領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第3回避経路を算出し、前記第3回避経路に従って前記自車両を走行させるための前記自動操舵の開始時刻である第3時刻を算出する、
第2ステップと、
前記第1時刻、前記第2時刻及び前記第3時刻のうちの最も遅い時刻に対応する前記第1回避経路、前記第2回避経路及び前記第3回避経路のうちの一つを衝突回避経路として選択するとともに、前記最も遅い時刻にて前記選択された衝突回避経路に対応する前記衝突回避動作を開始する、第3ステップと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両がガードレール及び側壁等の連続構造物に衝突しないように衝突回避動作を行う車両運転支援装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来の装置は、自車両の進行方向にある障害物が連続構造物である場合、障害物が連続構造物でない場合に比較して、衝突回避動作としての「自動制動(自動ブレーキ)又は自動操舵」の開始時期を遅らせる(特許文献1を参照。)。これにより、運転者自身が衝突回避のための運転操作を開始する前に衝突回避動作が実行される可能性が低下するので、運転者が衝突回避動作について違和感を覚える頻度を低減することができる。
【先行技術文献】
【特許文献】
【0003】
特開2017-226393号公報
【発明の概要】
【0004】
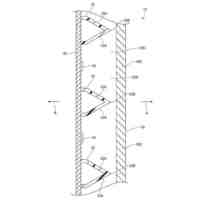
しかしながら、従来の装置は、図2及び図3に示したように、自車両HVが連続構造物CSの自車両側の端部Peに衝突する場合を考慮していない。このため、図2及び図3に示したように、自動制動のみにより衝突を回避する第1回避経路R1及び自車両HVの向きが連続構造物CSの長手方向に沿うように自動操舵を行って衝突を回避する第2回避経路R2は考慮されるが、自車両HVの進行方向が連続構造物CSの長手方向と交差するように自動操舵を行って衝突を回避する第3回避経路R3は考慮されていなかった。そのため、従来の装置によれば、自車両が連続構造物の端部に衝突するようなシーンにおいて、運転者自身が衝突回避のための運転操作を開始する前に衝突回避動作が実行される場合があり、運転者が衝突回避動作について違和感を覚える頻度を十分に低減できていないという問題がある。
【0005】
本発明は、係る課題を解決するためになされた。即ち、本発明の目的の一つは、自車両が連続構造物の端部に衝突する可能性があるシーンにおいて、運転者が衝突回避動作の介入を煩わしいと感じる頻度をより低減することができる、車両運転支援装置を提供することにある。
【0006】
本発明の車両運転支援装置の一態様は、
自車両の進行方向の所定領域に障害物が存在している場合に(S405)衝突回避動作を行って前記自車両と前記障害物との衝突を回避する(S450)車両運転支援装置(DS)であって、
前記障害物が連続構造物(CS)であり且つ前記自車両が前記連続構造物の前記自車両の側の端部(Pe)に衝突する可能性があると判定したとき(S430)、
前記衝突回避動作として前記自車両に制動力を付与する自動制動を実行して前記自車両を前記端部の手前で停止させることにより前記自車両と前記連続構造物との衝突を回避する第1回避経路(R1)に従って前記自車両を走行させた場合における前記自動制動の開始時刻である第1時刻(T1)を算出し(S510)、
前記衝突回避動作として自動操舵を実行して前記自車両の進行方向を変化させて前記自車両を前記連続構造物の前記自車両側の領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第2回避経路(R2)を算出し、前記第2回避経路(R2)に従って前記自車両を走行させるための前記自動操舵の開始時刻である第2時刻(T2)を算出し(S520)、
前記衝突回避動作として自動操舵を実行して前記自車両を前記連続構造物の長手方向と交差するように前記連続構造物の前記端部(Pe)の側方の領域を通過させることにより前記自車両と前記連続構造物との衝突を回避する第3回避経路(R3)を算出し、前記第3回避経路(R3)に従って前記自車両を走行させるための前記自動操舵の開始時刻である第3時刻(T3)を算出し(S550)、
前記第1時刻(T1)、前記第2時刻(T2)及び前記第3時刻(T3)のうちの最も遅い時刻に対応する前記第1回避経路(R1)、前記第2回避経路(R2)及び前記第3回避経路(R3)のうちの一つを(最終的な)衝突回避経路として選択するとともに(S580)、前記最も遅い時刻にて前記選択された衝突回避経路に対応する前記衝突回避動作を開始する(S450)。
【0007】
この態様によれば、自動制動により連続構造物の端部(Pe)との衝突を回避する第1回避経路(R1)、及び、自動操舵により自車両を「連続構造物の自車両側の領域」を通過させることにより連続構造物の端部との衝突を回避する第2回避経路(R2)のみならず、自動操舵により自車両を連続構造物の長手方向と交差させて自車両を連続構造物の端部(Pe)の側方の領域を通過させることにより連続構造物との衝突を回避する第3回避経路(R3)が、衝突回避経路の候補として考慮され、これらの経路の中で衝突回避動作が最も遅く開始される経路が最終的な衝突回避経路として採用される。この結果、衝突回避動作の開始時期がより遅くなるので、連続構造物を認識している運転者が衝突回避のための運転操作を開始する前に衝突回避動作が実行されてしまう可能性が低減され得る。その結果、運転者が衝突回避動作について違和感を覚える頻度を低減することができる。
【0008】
この場合、前記第2回避経路(R2)に従って前記自車両を走行させた場合に前記自車両が前記連続構造物との衝突を回避した時点以降において前記自車両が他の障害物と衝突することなく停車可能な停車スペース(SP1)が存在していない場合、前記第2回避経路が前記衝突回避経路として選択されないことが望ましい(S530、S540、S440)。更に、前記第3回避経路(R3)に従って前記自車両を走行させた場合に前記自車両が前記連続構造物との衝突を回避した時点以降において前記自車両が他の障害物と衝突することなく停車可能な停車スペース(SP2)が存在していない場合、前記第3回避経路が前記衝突回避経路として選択されないことが望ましい(S560、S570、S440)。自動操舵により連続構造物との衝突を回避できた後に自車両が安全に停車可能なスペースがないような回避経路は最終的な衝突回避経路としては適切ではないからである。
【0009】
上記説明においては、本発明の理解を助けるために、後述する実施形態に対応する発明の構成に対し、その実施形態で用いた名称及び/又は符号を括弧書きで添えている。しかしながら、本発明の各構成要素は、前記名称及び/又は符号によって規定される実施形態に限定されるものではない。本発明は、車両運転支援方法及びそのプログラムにも及ぶ。
【図面の簡単な説明】
【0010】
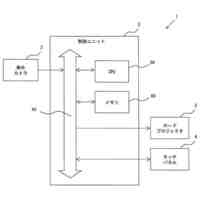
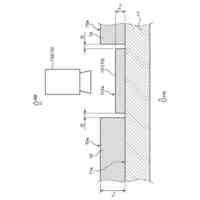
本発明の実施形態に係る車両運転支援装置の概略構成図である。
連続構造物との衝突を回避するための回避経路を示した平面図である。
連続構造物との衝突を回避するための回避経路を示した平面図である。
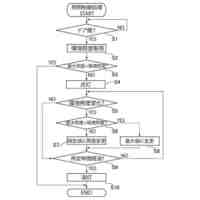
図1に示した運転支援ECUのCPUが実行するルーチンである。
図1に示した運転支援ECUのCPUが実行するサブルーチンである。
連続構造物との衝突を回避するための回避経路を示した平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
車窓用防虫網戸
3日前
個人
警告装置
1か月前
個人
小型EVシステム
1か月前
日本精機株式会社
ケース
1か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
照明装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
2か月前
個人
ブレーキシステム
1か月前
株式会社松華
懸架装置
2か月前
横浜ゴム株式会社
タイヤ
1か月前
個人
自動車ドア開度規制ベルト
1か月前
個人
ステージカー
2か月前
株式会社クラベ
ヒータユニット
1日前
井関農機株式会社
収穫作業車両
2日前
個人
自走式立体型洗車場
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
株式会社ユーシン
照明装置
1か月前
株式会社ユーシン
照明装置
14日前
井関農機株式会社
作業車両
1か月前
マツダ株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
3日前
マツダ株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
2か月前
帝国繊維株式会社
作業車両
1か月前
マツダ株式会社
車両
2か月前
日本精機株式会社
車両用照明装置
3か月前
井関農機株式会社
作業車両
14日前
個人
農業機械への架線給電システム
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ