TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025070998
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2024177752
出願日
2024-10-10
発明の名称
作業主体判定装置、作業主体判定方法及び作業主体判定プログラム
出願人
東日本旅客鉄道株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
G06Q
50/10 20120101AFI20250424BHJP(計算;計数)
要約
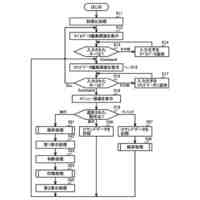
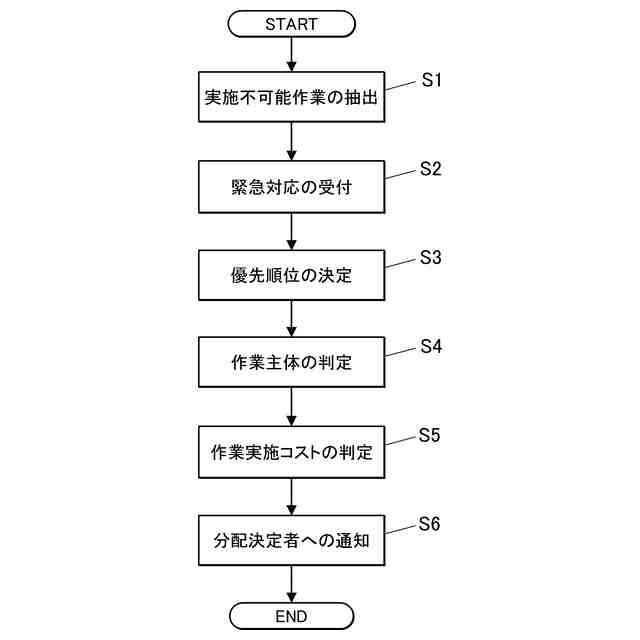
【課題】実施する必要のある作業について、作業員に実施させるべきか、ロボットに実施させるべきかを決定し易くする。
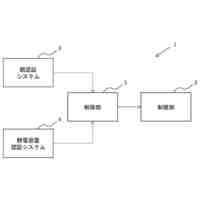
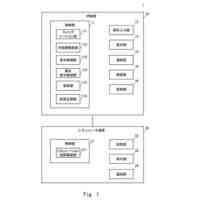
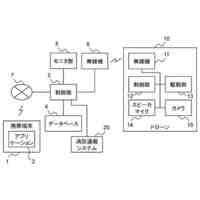
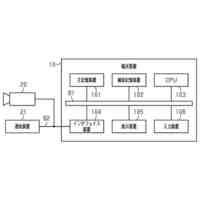
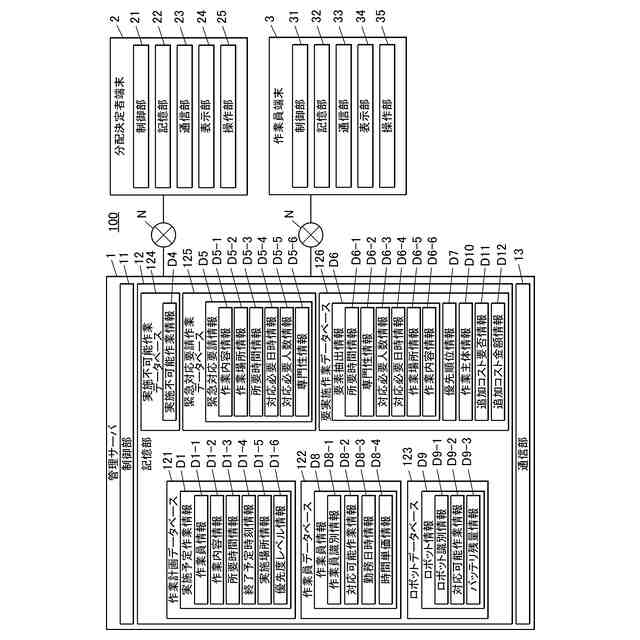
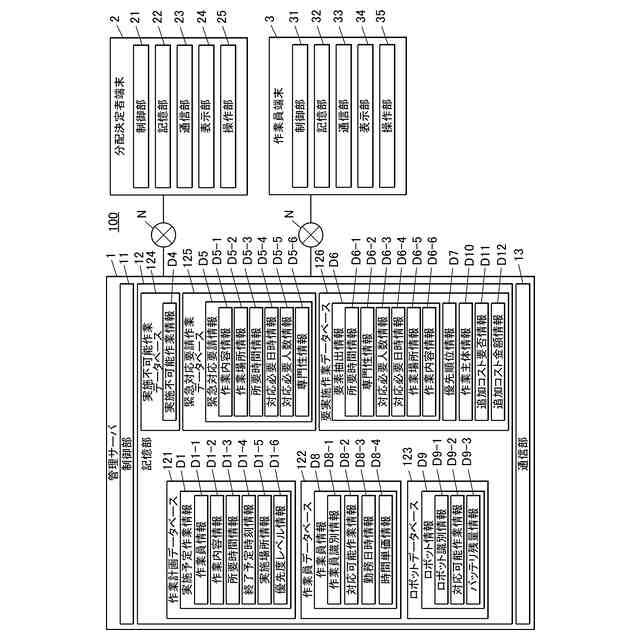
【解決手段】作業主体判定システム100は管理サーバ1を備え、管理サーバ1は、所定の施設において実施することを要する作業である要実施作業に関する情報である実施不可能作業情報D4及び緊急対応要請情報D5を取得する第1取得手段(制御部11、通信部13)と、要実施作業の作業主体を作業員又はロボットのいずれにすべきかを判定する作業主体判定手段(制御部11)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
所定の施設において実施することを要する作業である要実施作業に関する第1情報を取得する第1取得手段と、
前記要実施作業の作業主体を作業員又はロボットのいずれにすべきかを判定する作業主体判定手段と、
を備えることを特徴とする作業主体判定装置。
続きを表示(約 1,200 文字)
【請求項2】
前記作業主体判定手段は、前記要実施作業について作業の専門性の有無を判定することを特徴とする請求項1に記載の作業主体判定装置。
【請求項3】
前記作業主体判定手段は、当該作業を実施することができる作業員の有無を判定することを特徴とする請求項2に記載の作業主体判定装置。
【請求項4】
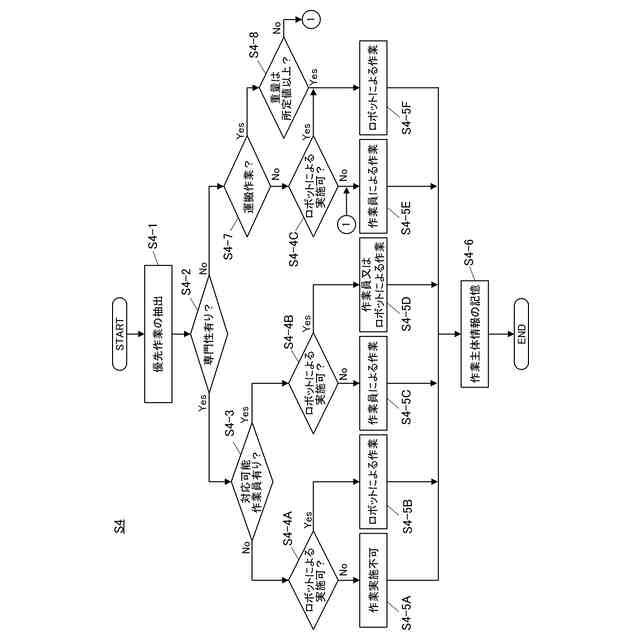
前記作業主体判定手段は、前記要実施作業が専門性を有し、当該作業を実施することができる作業員が存在する場合に、前記要実施作業をロボットにより実施することの可否を判定し、ロボットによる実施が可能である場合に、前記要実施作業を作業員又はロボットが実施すると判定し、ロボットによる実施が不可能である場合に、前記要実施作業を作業員が実施すると判定することを特徴とする請求項3に記載の作業主体判定装置。
【請求項5】
前記作業主体判定手段は、前記要実施作業が専門性を有し、当該作業を実施することができる作業員が存在しない場合に、前記要実施作業をロボットにより実施することの可否を判定し、ロボットによる実施が可能である場合に、前記要実施作業をロボットが実施すると判定し、ロボットによる実施が不可能である場合に、前記要実施作業の実施が不可能であると判定することを特徴とする請求項3に記載の作業主体判定装置。
【請求項6】
前記作業主体判定手段は、前記要実施作業をロボットにより実施することの可否を判定することを特徴とする請求項2に記載の作業主体判定装置。
【請求項7】
前記作業主体判定手段は、前記要実施作業が専門性を有せず、当該作業をロボットにより実施することが可能である場合に、前記要実施作業をロボットが実施すると判定し、前記要実施作業が専門性を有せず、当該作業をロボットにより実施することが不可能である場合に、前記要実施作業を作業員が実施すると判定することを特徴とする請求項6に記載の作業主体判定装置。
【請求項8】
施設外の事象に関する第2情報を取得する第2取得手段を備え、
前記作業主体判定手段は、前記第2情報に基づいて、前記要実施作業の作業主体を作業員又はロボットのいずれにすべきかを判定することを特徴とする請求項1に記載の作業主体判定装置。
【請求項9】
前記要実施作業は、運搬作業であり、
前記作業主体判定手段は、運搬対象の重量に基づいて、前記要実施作業の作業主体を作業員又はロボットのいずれにすべきかを判定することを特徴とする請求項1に記載の作業主体判定装置。
【請求項10】
コミニケーションツールによるログデータである第3情報を取得する第3取得手段を備え、
前記作業主体判定手段は、前記ログデータの内容から前記要実施作業を特定し、特定した前記要実施作業の作業主体を作業員又はロボットのいずれにすべきかを判定することを特徴とする請求項1に記載の作業主体判定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業主体判定装置、作業主体判定方法及び作業主体判定プログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近時、自律して動作するロボットに関する技術が発達し、従来人が行っていた作業を代わりに行うことができるロボットが次々に開発されている。このようなロボットを使用することで、ロボットにより行うことができる作業については作業員を割り当てる必要がなくなり、作業の効率化を図ることができる。
【0003】
このようなロボットを有効に活用するためには、実施する必要のある作業を各ロボットに適切に分配する必要がある。そこで、複数のロボットを組織化し、実施する必要のある作業を各ロボットに適切に分配することを目的としたシステムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特許第6212088号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このようなロボットは、あらゆる作業について人を代替できるわけではなく、ロボットに行わせることができない、又はできるとしても適切ではない作業も存在するところ、このような作業が含まれる場合、実施する必要のある作業を各ロボットに分配するだけでは、適切な作業の分配を行うことはできないことから、作業の分配を決定する決定者は、そもそも作業を作業員、すなわち人に実施させるべきか、ロボットに実施させるべきかに関する判断が必要となる場合がある。
【0006】
本発明の課題は、実施する必要のある作業について、作業員に実施させるべきか、ロボットに実施させるべきかを決定し易くすることである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、請求項1に記載の発明は、作業主体判定装置において、
所定の施設において実施することを要する作業である要実施作業に関する情報を取得する取得手段と、
前記要実施作業の作業主体を作業員又はロボットのいずれにすべきかを判定する作業主体判定手段と、
を備えることを特徴とする。
【0008】
請求項2に記載の発明は、請求項1に記載の作業主体判定装置において、
前記作業主体判定手段は、前記要実施作業について作業の専門性の有無を判定することを特徴とする。
【0009】
請求項3に記載の発明は、請求項2に記載の作業主体判定装置において、
前記作業主体判定手段は、当該作業を実施することができる作業員の有無を判定することを特徴とする。
【0010】
請求項4に記載の発明は、請求項3に記載の作業主体判定装置において、
前記作業主体判定手段は、前記要実施作業が専門性を有し、当該作業を実施することができる作業員が存在する場合に、前記要実施作業をロボットにより実施することの可否を判定し、ロボットによる実施が可能である場合に、前記要実施作業を作業員又はロボットが実施すると判定し、ロボットによる実施が不可能である場合に、前記要実施作業を作業員が実施すると判定することを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
20日前
個人
RFタグ読取装置
2日前
個人
人物再現システム
17日前
個人
在宅介護システム
2日前
個人
AI飲食最適化プラグイン
10日前
有限会社ノア
データ読取装置
18日前
個人
電話管理システム及び管理方法
11日前
株式会社ザメディア
出席管理システム
25日前
個人
広告提供システムおよびその方法
20日前
株式会社CROSLAN
支援装置
2日前
個人
日誌作成支援システム
17日前
株式会社タクテック
商品取出集品システム
24日前
ミサワホーム株式会社
情報処理装置
24日前
長屋印刷株式会社
画像形成システム
2日前
個人
ポイント還元付き配送システム
18日前
ひびきの電子株式会社
認証システム
4日前
トヨタ自動車株式会社
作業判定方法
26日前
トヨタ自動車株式会社
工程計画装置
25日前
オムロン株式会社
回転装置及びマウス
6日前
オベック実業株式会社
接続構造
17日前
ゼネラル株式会社
RFIDタグ付き物品
27日前
トヨタ自動車株式会社
情報処理システム
26日前
株式会社村田製作所
動き検知装置
24日前
トヨタ自動車株式会社
情報処理方法
26日前
株式会社国際電気
支援システム
27日前
個人
コンテンツ配信システム
24日前
株式会社実身美
ワーキングシェアリングシステム
18日前
株式会社ドクター中松創研
生成AIの適切使用法
17日前
個人
アルバム作成システム及びアルバム作成方法
4日前
ブラザー工業株式会社
ラベルプリンタ
26日前
個人
プラットフォームシステム
24日前
株式会社半導体エネルギー研究所
情報処理システム
2日前
株式会社エスシーシー
置き配システム
18日前
株式会社ノーリツ
リモートコントローラ
3日前
トヨタ自動車株式会社
作業支援システム
2日前
パテントフレア株式会社
識別コードの付与情報増加法
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ