TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025070726
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023181237
出願日
2023-10-20
発明の名称
開閉体制御装置、及び挟込検出方法
出願人
株式会社デンソー
,
学校法人大阪産業大学
代理人
個人
,
個人
主分類
E05F
15/41 20150101AFI20250424BHJP(錠;鍵;窓または戸の付属品;金庫)
要約
【課題】挟込の誤検出抑制と高い応答性とを両立することができる開閉体制御装置、及び挟込検出方法を提供する。
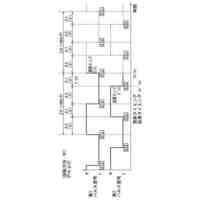
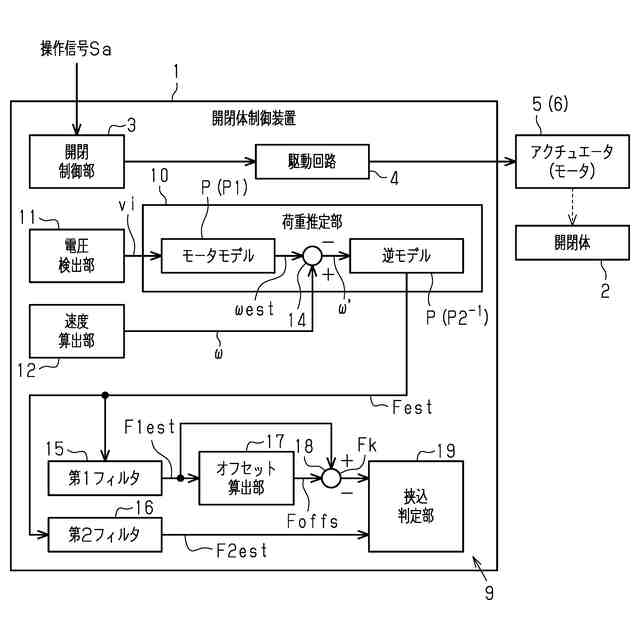
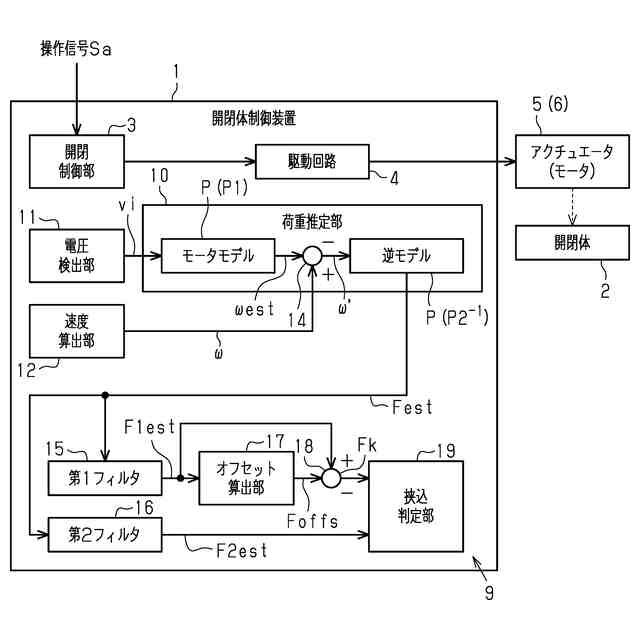
【解決手段】荷重推定部10は、開作動中又は閉作動中の開閉体2に生じる荷重を推定する。第1フィルタ15は、荷重推定部10によって求められた推定荷重Festの波形から、少なくともノイズを除去する。第2フィルタ16は、推定荷重Festの波形から、第1フィルタ15で除去するよりも低い周波数を除去する。オフセット算出部17は、第1フィルタ15の出力に基づいて、推定荷重Festのオフセット値Foffsを算出する。挟込判定部19は、第1フィルタ15及び第2フィルタ16の出力に基づいて、開閉体2の挟込判定を実行する。挟込判定部19は、第2フィルタ16の出力に基づき挟込が開始されたか否かを監視し、挟込開始を検出した際に固定されたオフセット値Foffsと第1フィルタ15の出力とに基づいて挟込判定を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
開作動中又は閉作動中の開閉体(2)に生じる荷重を推定する荷重推定部(10)と、
前記荷重推定部によって求められた推定荷重(Fest)の波形から、少なくともノイズを除去する第1フィルタ(15)と、
前記推定荷重の波形から、前記第1フィルタで除去するよりも低い周波数を除去する第2フィルタ(16)と、
前記第1フィルタの出力に基づいて、前記推定荷重のオフセット値(Foffs)を算出するオフセット算出部(17)と、
前記第1フィルタ及び前記第2フィルタの出力に基づいて、前記開閉体の挟込判定を実行する挟込判定部(19)と、を備え、
前記挟込判定部は、前記第2フィルタの出力に基づき挟込が開始されたか否かを監視し、挟込開始を検出した際に固定された前記オフセット値と前記第1フィルタの出力とに基づいて挟込判定を実行する、開閉体制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記挟込判定部は、前記第2フィルタの出力が挟込開始判定閾値(Et)を超えた場合に、挟込が開始されたと判定して前記オフセット算出部に前記オフセット値を固定させ、前記オフセット値の固定後、固定された前記オフセット値と前記第1フィルタの出力との差が挟込判定閾値(Es)を超えた場合に、挟込有りと判定する、請求項1に記載の開閉体制御装置。
【請求項3】
前記荷重推定部は、前記開閉体の動力であるモータ(6)の動作に係る状態空間表現を伝達関数表現に変換することにより求めたモデル(P)を用いて、前記開閉体に生じる荷重を推定する、請求項1に記載の開閉体制御装置。
【請求項4】
前記モデルは、
前記モータに印加される電圧を検出する電圧検出部(11)からモータ電圧値(v
i
)を入力して前記モータの角速度を推定するモータモデル(P1)と、
前記モータモデルから出力された推定角速度(ωest)と、前記モータの回転速度を算出する速度算出部(12)から出力されたモータ角速度(ω)と、の差分を入力して、前記開閉体に生じる荷重を推定する逆モデル(P2
-1
)と、を含み、
前記荷重推定部は、前記逆モデルの出力を前記推定荷重として前記第1フィルタ及び前記第2フィルタに出力する、請求項3に記載の開閉体制御装置。
【請求項5】
前記オフセット算出部は、現在から過去に遡った複数個分の荷重の値の平均値を前記オフセット値として求める処理を、コンピュータの制御周期単位で繰り返し実行するとともに、挟込開始が検出された時点で前記オフセット値を固定する、請求項1に記載の開閉体制御装置。
【請求項6】
開作動中又は閉作動中の開閉体(2)に物体が挟み込まれる挟込をコンピュータによって検出する挟込検出方法であって、
開作動中又は閉作動中の前記開閉体(2)に生じる荷重を推定するステップと、
求められた推定荷重(Fest)の波形から、少なくともノイズを第1フィルタ(15)によって除去するステップと、
前記推定荷重の波形から、前記第1フィルタで除去するよりも低い周波数を第2フィルタ(16)によって除去するステップと、
前記第1フィルタの出力に基づいて、前記推定荷重のオフセット値(Foffs)を算出するステップと、
前記第2フィルタの出力に基づき、挟込が開始されたか否かを監視するステップと、
前記第2フィルタの出力に基づき挟込開始が検出された際に、前記オフセット値を固定するステップと、
固定された前記オフセット値と前記第1フィルタの出力とに基づいて、挟込判定を実行するステップと、を備える挟込検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、開閉体制御装置、及び挟込検出方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、特許文献1に開示されるように、戸開動作時におけるドアと戸袋との間への物体の挟込を検出可能なドア制御装置が周知である。特許文献1には、ドアの速度変動の要因となる抗力を推知する抗力推定部を設けるとともに、抗力推定部によって推定される抗力が所定値を超えた場合に、ドアと戸袋との間への物体の挟込を検出することが記載されている。また、特許文献1には、運動方程式等の力学モデルを用いて抗力を推定することも記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-206329号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、力学モデルを用いた挟込判定としては、力学モデルで推定した抗力に対して閾値を設定し、そして、推定した抗力が閾値を超えた場合に挟込有りと判定する方法が考えられる。ところで、ドア作動時に摺動負荷変動が生じたり、装置が劣化していたりすると、これらの要因によって、ドアの速度に変動が生じる。ドアに速度変動が生じた場合、推定する抗力に前述の要因を含んだ値も含まれるので、挟込によって生じる抗力との間に誤差が生じる。よって、挟込を誤検出してしまう可能性があった。
【0005】
この誤差を低減するには、例えば、算出された抗力にフィルタをかける方法が考えられる。しかし、この方法では、フィルタリングによる遅延が生じるため、挟込検出が遅れる可能性があった。よって、算出された抗力を単にフィルタリングするという単純な方法では、前述の課題を解決できない現状があった。
【0006】
本発明の目的は、挟込の誤検出抑制と高い応答性とを両立することができる開閉体制御装置、及び挟込検出方法を提供することにある。
【課題を解決するための手段】
【0007】
前記課題を解決する開閉体制御装置(1)は、開作動中又は閉作動中の開閉体(2)に生じる荷重を推定する荷重推定部(10)と、前記荷重推定部によって求められた推定荷重(Fest)の波形から、少なくともノイズを除去する第1フィルタ(15)と、前記推定荷重の波形から、前記第1フィルタで除去するよりも低い周波数を除去する第2フィルタ(16)と、前記第1フィルタの出力に基づいて、前記推定荷重のオフセット値(Foffs)を算出するオフセット算出部(17)と、前記第1フィルタ及び前記第2フィルタの出力に基づいて、前記開閉体の挟込判定を実行する挟込判定部(19)と、を備え、前記挟込判定部は、前記第2フィルタの出力に基づき挟込が開始されたか否かを監視し、挟込開始を検出した際に固定された前記オフセット値と前記第1フィルタの出力とに基づいて挟込判定を実行する。
【0008】
前記課題を解決する挟込検出方法は、開作動中又は閉作動中の開閉体(2)に物体が挟み込まれる挟込をコンピュータによって検出する方法であって、開作動中又は閉作動中の前記開閉体(2)に生じる荷重を推定するステップと、求められた推定荷重(Fest)の波形から、少なくともノイズを第1フィルタ(15)によって除去するステップと、前記推定荷重の波形から、前記第1フィルタで除去するよりも低い周波数を第2フィルタ(16)によって除去するステップと、前記第1フィルタの出力に基づいて、前記推定荷重のオフセット値(Foffs)を算出するステップと、前記第2フィルタの出力に基づき、挟込が開始されたか否かを監視するステップと、前記第2フィルタの出力に基づき挟込開始が検出された際に、前記オフセット値を固定するステップと、固定された前記オフセット値と前記第1フィルタの出力とに基づいて、挟込判定を実行するステップと、を備える。
【0009】
本構成によれば、荷重推定部によって求められた推定荷重は、第1フィルタによってフィルタリングされることにより、ゲインの確保を優先した波形に変換される。また、荷重推定部によって求められた推定荷重は、第2フィルタでフィルタリングされることにより、推定荷重の誤差の軽減を優先した波形に変換される。そして、第1フィルタ及び第2フィルタの出力を用いて挟込の有無を判定する。ゲインの確保を優先した波形を用いて挟込有無を判定すれば、挟込判定の応答性が向上する。また、推定荷重の誤差が軽減された波形を用いて挟込有無を判定すれば、誤検出の低い判定結果が得られる。よって、挟込の誤検出抑制と高い応答性とを両立することが可能となる。
【図面の簡単な説明】
【0010】
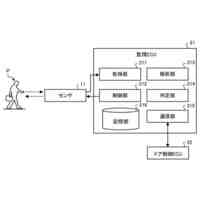
一実施形態に係る開閉体制御装置の構成を示すブロック図である。
モデルの概要を示す説明図である。
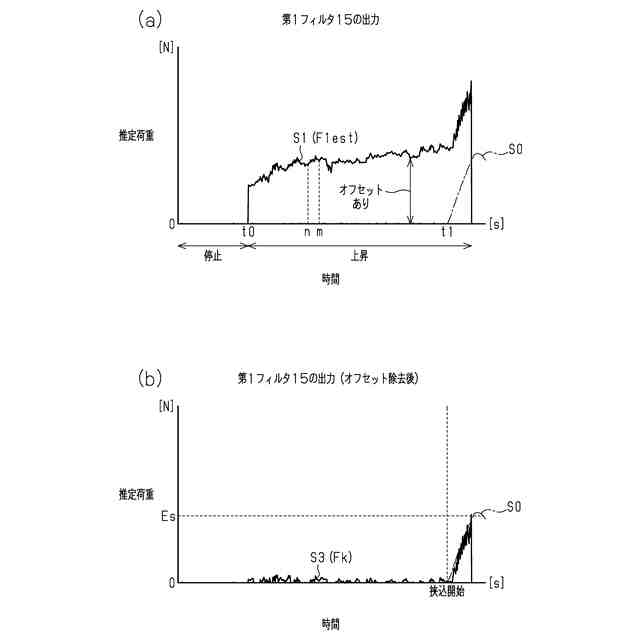
(a)は、第1フィルタの出力を示す波形図であり、(b)は、オフセット除去後の第1フィルタの出力を示す波形図である。
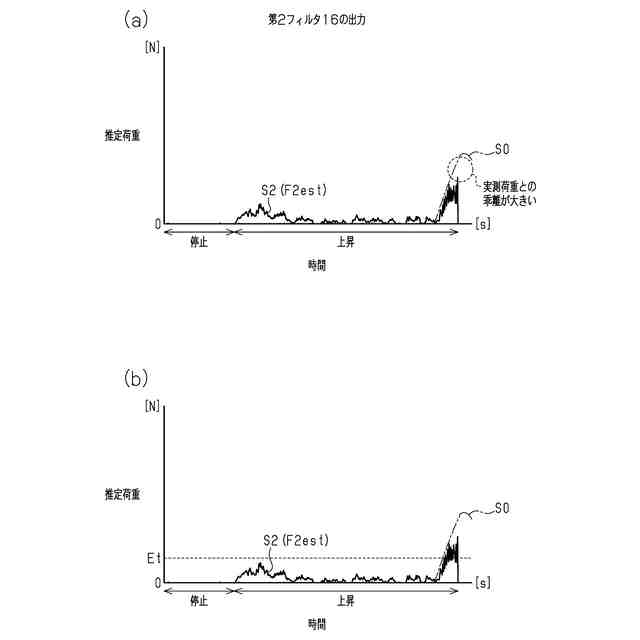
(a)は、第2フィルタの出力を示す波形図であり、(b)は、挟込開始の検出例を示す波形図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
リョービ株式会社
ヒンジ装置
1か月前
株式会社ニシムラ
ラッチ錠
23日前
株式会社SKB
引き戸装置
1か月前
ミサワホーム株式会社
錠受具
2日前
リョービ株式会社
ドアクローザ
2か月前
タキゲン製造株式会社
抜差し蝶番
27日前
美和ロック株式会社
ハンドル装置
28日前
マツ六株式会社
引戸用鎌錠
1か月前
株式会社ナスタ
荷物受取容器
2か月前
株式会社ナスタ
荷物受取容器
1か月前
株式会社アイシン
ドア支持装置
2か月前
マツ六株式会社
引戸の引手部材
1か月前
ミネベアミツミ株式会社
電気錠
1か月前
株式会社WEST inx
引戸用引手
20日前
株式会社ユーシン
開閉体制御装置
1日前
株式会社アイシン
障害物判定装置
1か月前
株式会社アイシン
開閉体制御装置
1か月前
株式会社アイシン
開閉体制御装置
1か月前
株式会社ユーシン
ドアハンドル装置
1か月前
株式会社ユーシン
ドアハンドル装置
1か月前
株式会社アンセイ
ロック装置
1か月前
株式会社ユーシン
ドアハンドル装置
2か月前
ミネベアミツミ株式会社
車両用ドア
2か月前
株式会社ユーシン
ドアハンドル装置
1か月前
株式会社アイシン
キーユニット
1か月前
株式会社アイシン
制御システム
1か月前
大和ハウス工業株式会社
環境制御設備
1日前
オムロン株式会社
電磁ロック装置
14日前
三和シヤッター工業株式会社
引き違い戸
1か月前
タキゲン製造株式会社
掛け金
1か月前
株式会社ノムラテック
補助錠装置
1か月前
トヨタ自動車株式会社
制御装置
13日前
株式会社LIXIL
シリンダ錠
6日前
株式会社アイシン
監視装置
15日前
YKK AP株式会社
建具
2か月前
株式会社アルファ
ドアハンドル装置
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ