TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064890
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2024077720
出願日
2024-05-13
発明の名称
性能及びオフトラック緩和最適化に基づいてアクセスコマンドをソートするデータ記憶デバイス
出願人
ウェスタン デジタル テクノロジーズ インコーポレーテッド
代理人
弁理士法人 快友国際特許事務所
主分類
G11B
5/596 20060101AFI20250410BHJP(情報記憶)
要約
【課題】処理デバイスを備えるデータ記憶デバイス及び方法を提供する。
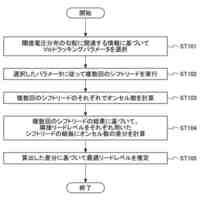
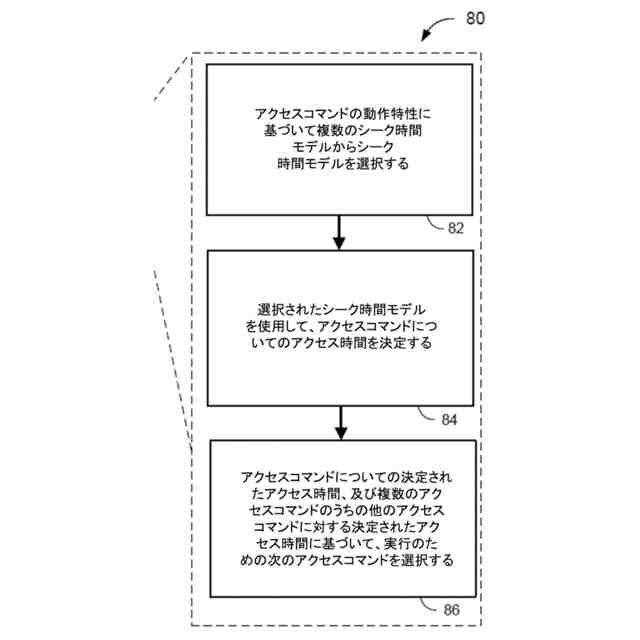
【解決手段】ディスクドライブの制御回路の読み取り/書き込みチャネル回路がディスクドライブの動作を制御する際に実施又は実行する方法であって、アクセスコマンドの動作特性に少なくとも部分的に基づいて複数のシーク時間モデルからシーク時間モデルを選択することを含む。動作特性は、アクセスコマンドを実行するオフトラック感受性に関係している。方法はまた、選択されたシーク時間モデルを使用して、アクセスコマンドについてのアクセス時間を決定することと、アクセスコマンドについての決定されたアクセス時間及び複数のアクセスコマンドのうちの他のアクセスコマンドについての決定されたアクセス時間に基づいて、実行のための次のアクセスコマンドを選択することと、を行う。
【選択図】図2C
特許請求の範囲
【請求項1】
データ記憶デバイスであって、
1つ以上のディスクと、
1つ以上のヘッドのうちの選択されたヘッドを、前記1つ以上のディスクのうちの対応するディスクの対応するディスク表面に近接して位置決めするように構成されたアクチュエータ機構と、
1つ以上の処理デバイスであって、
アクセスコマンドの動作特性に少なくとも部分的に基づいて複数のシーク時間モデルからシーク時間モデルを選択することであって、前記動作特性が、前記アクセスコマンドを実行するオフトラック感受性に関係している、選択することと、
前記選択されたシーク時間モデルを使用して、前記アクセスコマンドについてのアクセス時間を決定することと、
前記アクセスコマンドについての決定された前記アクセス時間、及び複数のアクセスコマンドのうちの他のアクセスコマンドについての決定されたアクセス時間に基づいて、実行のための次のアクセスコマンドを選択することと、を行うように構成されている、1つ以上の処理デバイスと、を備える、データ記憶デバイス。
続きを表示(約 1,700 文字)
【請求項2】
前記複数のシーク時間モデルが、
元のシーク時間モデルと、
前記元のシーク時間モデル及び少なくとも1つの遅延時間モデルに基づく、少なくとも1つの低速シーク時間モデルと、を備える、請求項1に記載のデータ記憶デバイス。
【請求項3】
前記動作特性が、前記アクセスコマンド及び前記アクセスコマンドに先行するアクセスコマンドを含む、シークアクセスパターンのオフトラック感受性を含む、請求項2に記載のデータ記憶デバイス。
【請求項4】
前記シーク時間モデルを前記選択することが、
前記アクセスコマンドが第2のしきい値よりも長いシーク長を有する読み取りシークによって先行される、第1のしきい値よりも短いシーク長を有する書き込みシークであることに応答して、前記少なくとも1つの低速シーク時間モデルを選択することと、
前記アクセスコマンドが(1)前記第1のしきい値よりも短いシーク長を有する書き込みシークでも(2)前記第2のしきい値よりも長いシーク長を有する読み取りシークによって先行されるコマンドでもないことに応答して、前記元のシーク時間モデルを選択することと、のうちの1つを含む、請求項3に記載のデータ記憶デバイス。
【請求項5】
前記少なくとも1つの低速シーク時間モデルを前記選択することが、前記アクセスコマンドによるオフトラック書き込みイベントの可能性を低減する、請求項4に記載のデータ記憶デバイス。
【請求項6】
前記シーク時間モデルを前記選択することが、
前記アクセスコマンドが、第1のしきい値より短いシーク長を有する書き込みシークであり、第2のしきい値より短い追従時間を有するトラック追従によって先行され、第3のしきい値より長いシーク長を有する読み取りシークによって先行されることに応答して、前記少なくとも1つの低速シーク時間モデルを選択することと、
前記アクセスコマンドが、前記第1のしきい値よりも短いシーク長を有する書き込みシークであり、前記第2のしきい値よりも長い追従時間を有するトラック追従によって先行され、前記第3のしきい値よりも長いシーク長を有する読み取りシークによって先行されることに応答して、前記元のシーク時間モデルを選択することと、のうちの1つを含む、請求項3に記載のデータ記憶デバイス。
【請求項7】
前記少なくとも1つの低速シーク時間モデルが、
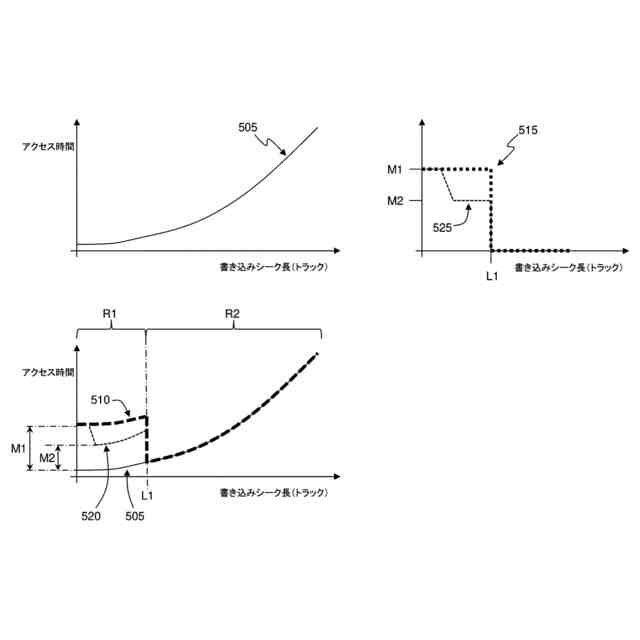
第1の遅延時間モデルと組み合わされた前記元のシーク時間モデルを含む、第1の低速シーク時間モデルと、
前記第1の遅延時間モデルとは異なる第2の遅延時間モデルと組み合わされた前記元のシーク時間モデルを含む、第2の低速シーク時間モデルと、を含む、請求項2に記載のデータ記憶デバイス。
【請求項8】
前記第1の遅延時間モデルが、チルト距離学習の第1のステータスに基づいており、
前記第2の遅延時間モデルが、前記チルト距離学習の第1のステータスとは異なるチルト距離学習の第2のステータスに基づいている、請求項7に記載のデータ記憶デバイス。
【請求項9】
前記アクセスコマンドの回転距離が前記少なくとも1つの低速シーク時間モデルを使用して決定された時間未満であると決定したことに応答して、
前記シーク時間モデルを前記選択することが、前記元のシーク時間モデルを選択することを含み、
前記アクセス時間を前記決定することが、前記元のシーク時間モデルを使用して決定された時間に1回転の時間を加算することを含む、請求項2に記載のデータ記憶デバイス。
【請求項10】
前記動作特性が、圧電(PZT)アクチュエータストロークを含み、
前記シーク時間モデルを前記選択することが、前記PZTアクチュエータストロークがしきい値を超えたことに応答して前記低速シーク時間モデルを選択することを含む、請求項9に記載のデータ記憶デバイス。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
ディスクドライブなどのデータ記憶デバイスは、ディスクと、アクチュエータアームの遠位端に接続されたヘッドと、を備え、アクチュエータアームは、ボイスコイルモータ(voice coil motor、VCM)によってピボットを中心に回転して、ヘッドをディスク上で半径方向に位置決めする。ディスクは、ユーザデータセクタ及びサーボウェッジ又はサーボセクタを記録するための複数の半径方向に離隔された同心トラックを備える。サーボセクタは、この情報はヘッドによって読み取られ、サーボ制御システムによって処理されて、アクチュエータアームがトラック間でシークするときにアクチュエータアームを制御する、ヘッド位置決め情報(例えば、トラックアドレス)を備える。
続きを表示(約 4,500 文字)
【0002】
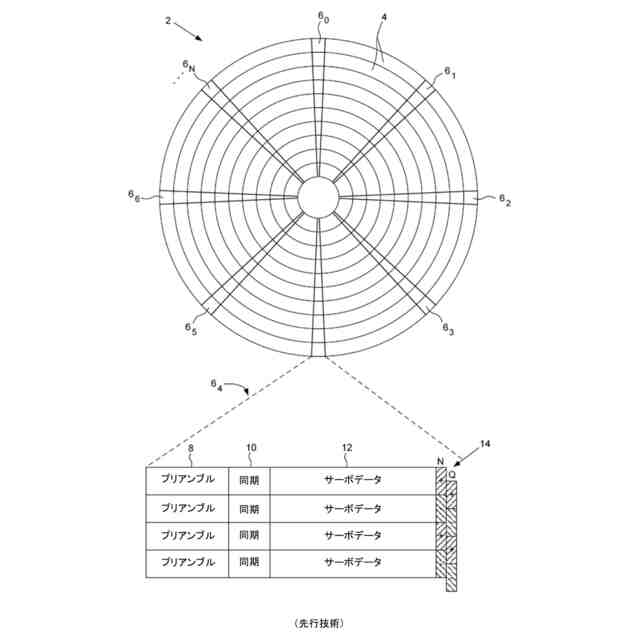
図1は、各サーボトラックの円周の周りに記録されたサーボウェッジ6
0
-6
N
によって画定された多数の半径方向に離隔された同心サーボトラック4を備える先行技術のディスクフォーマット2を示す。複数の同心データトラックがサーボトラック4に対して画定され、データトラックは、サーボトラック4と同じ又は異なる半径方向密度(例えば、トラック/インチ(tracks per inch、TPI))を有し得る。各サーボウェッジ6
i
は、読み取り信号の適切なゲイン調整及びタイミング同期を可能にする周期パターンを記憶するためのプリアンブル8と、サーボデータフィールド12にシンボル同期するために使用される特殊パターンを記憶するための同期マーク10と、を備える。サーボデータフィールド12は、シーク動作中にターゲットデータトラック上にヘッドを位置決めするために使用される、サーボトラックアドレスなどの粗いヘッド位置決め情報を記憶する。各サーボウェッジ(例えば、サーボウェッジ6
4
)は、位相ベースのサーボバースト14のグループ(例えば、N及びQサーボバースト)を更に備え、これらは、互いに対して、かつサーボトラック中心線に対して所定の位相で記録される。
【0003】
粗いヘッド位置決め情報は、シーク動作中にターゲットデータトラック上にヘッドを位置決めするために処理され、サーボバースト14は、書き込み/読み取り動作中にデータトラックにアクセスする間に中心線トラッキングに使用される微細なヘッド位置決め情報を提供する。位置誤差信号(position error signal、PES)は、サーボバースト14を読み取ることによって生成され、PESは、ターゲットサーボトラックの中心線に対するヘッドの測定位置を表す。サーボコントローラは、PESを処理して、1つ以上のヘッドアクチュエータに印加される制御信号を生成し、ヘッドをディスク上で半径方向に、PESを低減する方向に作動させる。いくつかの例では、1つ以上のヘッドアクチュエータは、ボイスコイルモータ、並びにミリアクチュエータ又はマイクロアクチュエータなどの1つ以上の微細制御アクチュエータを備え得る。
【発明の概要】
【0004】
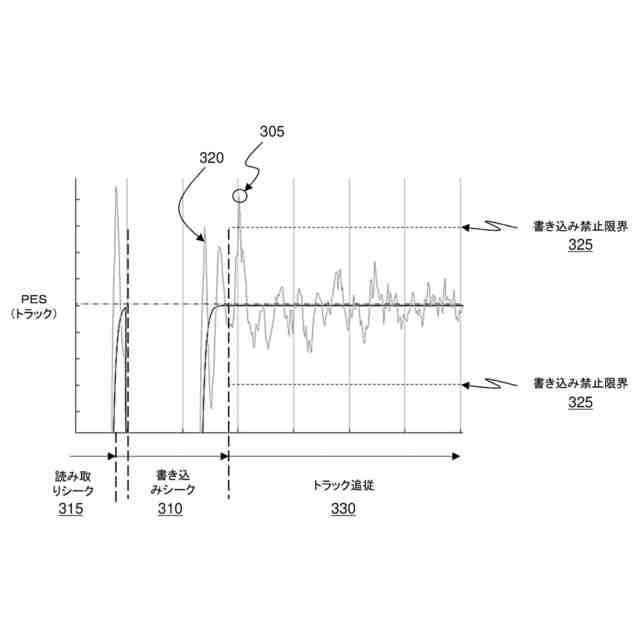
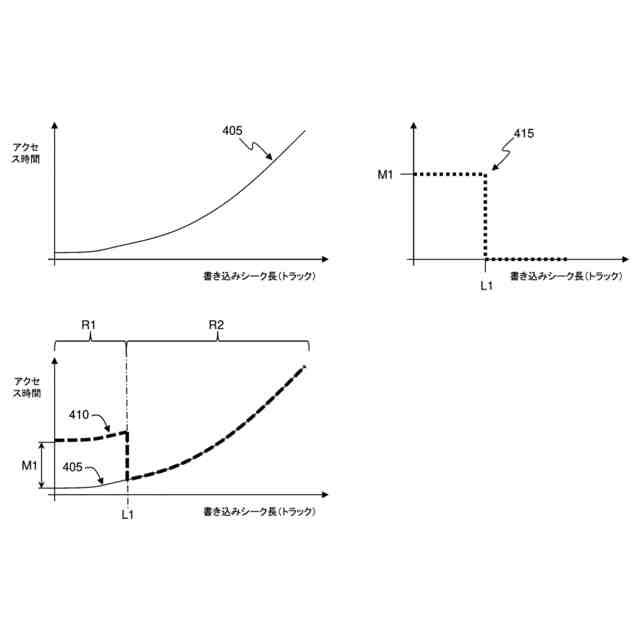
本明細書で開示される様々な例は、I/O性能のみに焦点を当てない回転位置決め最適化(rotational positioning optimization、RPO)を用いて新規かつ発明的な次のコマンド選択を実施するように構成された制御回路を有する、ハードディスクドライブなどのデータ記憶デバイスを提供する。様々な例では、本開示の制御回路は、アクセスコマンドと関連付けられたシークアクセスパターンに基づいてアクセスコマンドについてのアクセス時間を決定するためのシーク時間モデルを選択するように発明的に構成されている。実施形態では、低速シーク時間モデルは、オフトラック感受性のシークアクセスパターン内の1つ以上のコマンドに対して選択される。低速シーク時間モデルを使用することから生じる追加のシーク時間は、オフトラック書き込み(off track write、OTW)イベントなどのオフトラック状況のリスクに対するペナルティとして作用する。このようにして、RPOシステムは、シークアクセスパターンに応じて、I/O性能及びOTWイベントのリスクの両方に基づいて最良の次のアクセスコマンドを選択し得る。実施形態では、選択された次のコマンドがオフトラック感受性のシークアクセスパターンと関連付けられている場合、実際のシークは、シーク到着PESにおける振動を減衰させるために追加のシーク時間だけ遅延され得る。このようにして、追加のシーク時間がコマンドスケジューリングにおいてすでに考慮されているので、性能損失を最小限に抑えながらOTWイベントリスクを低減することができる。
【0005】
様々な例示的な態様は、1つ以上のディスクと、1つ以上のヘッドのうちの選択されたヘッドを、1つ以上のディスクのうちの対応するディスクの対応するディスク表面に近接して位置決めするように構成されたアクチュエータ機構と、1つ以上の処理デバイスと、を備える、データ記憶デバイスを対象とする。1つ以上の処理デバイスは、アクセスコマンドの動作特性に少なくとも部分的に基づいて複数のシーク時間モデルからシーク時間モデルを選択することであって、動作特性が、アクセスコマンドを実行するオフトラック感受性に関係している、選択することと、選択されたシーク時間モデルを使用して、アクセスコマンドについてのアクセス時間を決定することと、アクセスコマンドについての決定されたアクセス時間、及び複数のアクセスコマンドのうちの他のアクセスコマンドについての決定されたアクセス時間に基づいて、実行のための次のアクセスコマンドを選択することと、を行うように構成されている。
【0006】
様々な例示的な態様は、1つ以上の処理デバイスによって、アクセスコマンドの動作特性に少なくとも部分的に基づいて複数のシーク時間モデルからシーク時間モデルを選択することであって、動作特性が、アクセスコマンドを実行するオフトラック感受性に関係している、選択することと、1つ以上の処理デバイスによって、選択されたシーク時間モデルを使用して、アクセスコマンドについてのアクセス時間を決定することと、1つ以上の処理デバイスによって、アクセスコマンドについての決定されたアクセス時間、及び複数のアクセスコマンドのうちの他のアクセスコマンドについての決定されたアクセス時間に基づいて、実行のための次のアクセスコマンドを選択することと、を含む、方法を対象とする。
【0007】
様々な例示的な態様は、アクセスコマンドの動作特性に少なくとも部分的に基づいて複数のシーク時間モデルからシーク時間モデルを選択するための手段であって、動作特性が、アクセスコマンドを実行するオフトラック感受性に関係している、手段と、選択されたシーク時間モデルを使用して、アクセスコマンドについてのアクセス時間を決定するための手段と、アクセスコマンドについての決定されたアクセス時間、及び複数のアクセスコマンドのうちの他のアクセスコマンドについての決定されたアクセス時間に基づいて、実行のための次のアクセスコマンドを選択するための手段と、を備える、1つ以上の処理デバイスを対象とする。
【0008】
様々な更なる態様が添付の図面に示され、以下で説明され、それらに基づいて更に明らかになるであろう。
【図面の簡単な説明】
【0009】
本開示の技術の様々な特徴及び利点は、それらの技術の特定の例の以下の説明から、及び添付の図面に示されるように、明らかになるであろう。図面は必ずしも縮尺通りではなく、その代わりに、技術的概念の原理を説明することに重点が置かれている。図面において、同様の参照符号は、異なる図を通して同じ部分を指す場合がある。図面は、本開示の例示的な例のみを示しており、範囲を限定するものではない。
各サーボトラックの円周の周りに記録されたサーボウェッジによって画定される多数の半径方向に離隔された同心サーボトラックを備えるような先行技術のディスクフォーマットを示す。
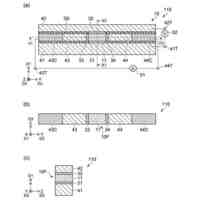
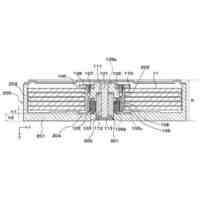
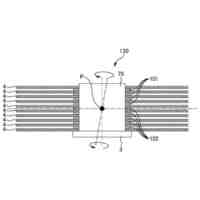
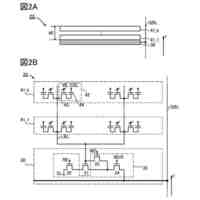
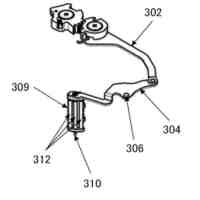
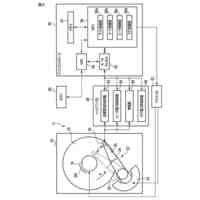
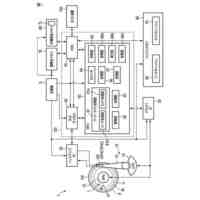
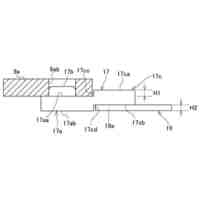
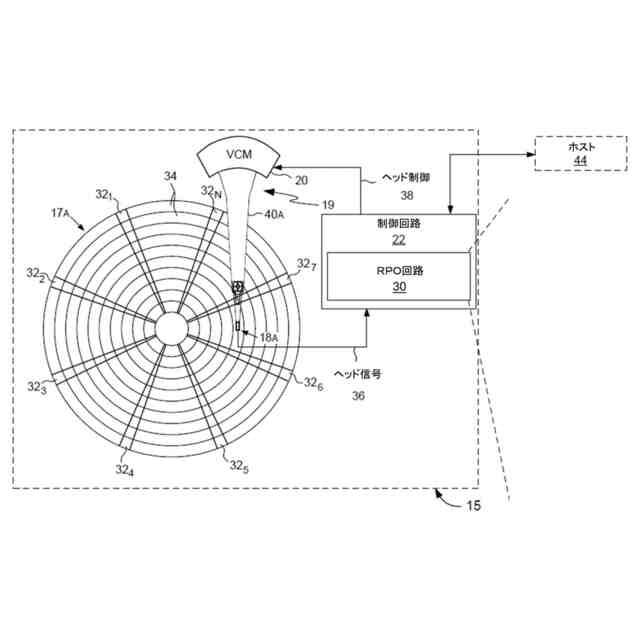
本開示の態様による、ディスクドライブの形態のデータ記憶デバイスの上面図及び側面図の概念ブロック図を示す。
本開示の態様による、ディスクドライブの形態のデータ記憶デバイスの上面図及び側面図の概念ブロック図を示す。
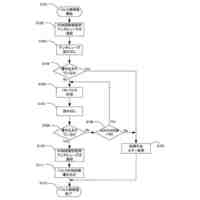
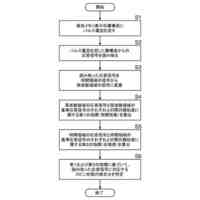
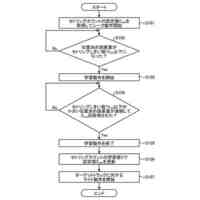
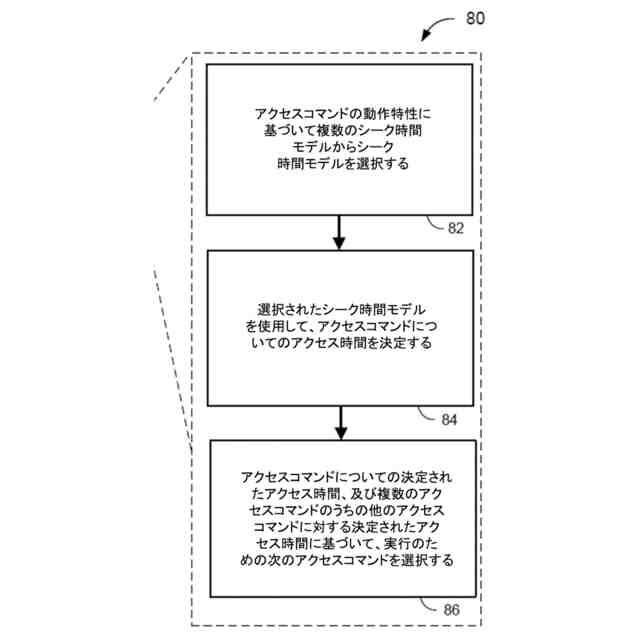
本開示の態様による、ディスクドライブの制御回路の読み取り/書き込みチャネル回路がディスクドライブの動作を制御する際に実施又は実行し得る、例示的な方法のフローチャートを示す。
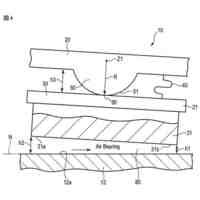
本開示の態様による、オフトラック書き込み(OTW)イベントの一例を示す。
本開示の態様による、元のシーク時間モデル及び低速シーク時間モデルの一実施形態を示す。
本開示の態様による、元のシーク時間モデル、第1の低速シーク時間モデル、及び第2の低速シーク時間モデルの一実施形態を示す。
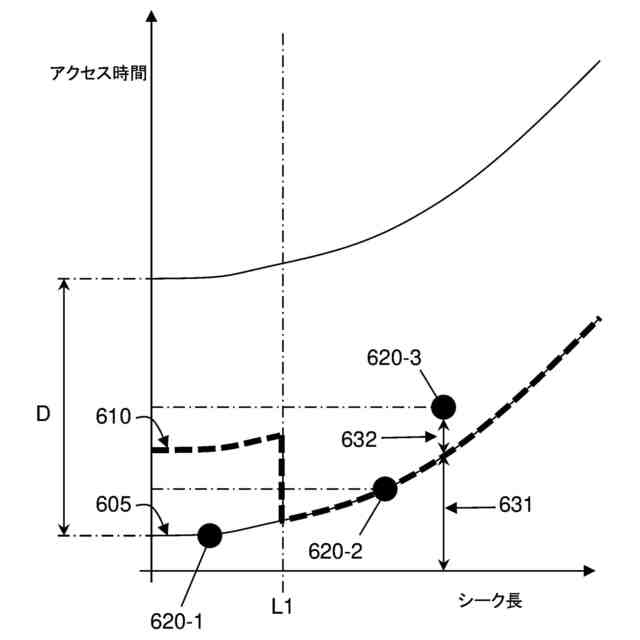
本開示の態様による、アクセスコマンドのためのシーク時間モデルを選択することと、実行のために次のアクセスコマンドを選択することとの一例を示す。
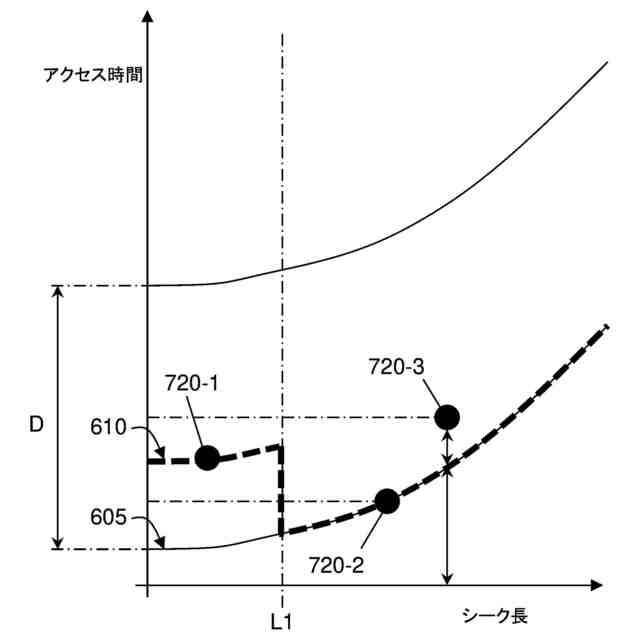
本開示の態様による、アクセスコマンドのためのシーク時間モデルを選択することと、実行のために次のアクセスコマンドを選択することとの別の例を示す。
本開示の態様による、アクセスコマンドのためのシーク時間モデルを選択することと、実行のために次のアクセスコマンドを選択することとの別の例を示す。
本開示の態様による、アクセスコマンドのためのシーク時間モデルを選択することと、実行のために次のアクセスコマンドを選択することとの別の例を示す。
本開示の態様による、シーク時間モデルを調整する一例を示す。
本開示の態様による、長い読み取りシーク、データを読み取るためのトラック追従、短い書き込みシーク、及びデータを書き込むためのトラック追従に対するボイスコイルモータ電流の一例を示す。
本開示の態様による、短い書き込みシークに先行する大きい圧電アクチュエータストロークの一例を示す。
【発明を実施するための形態】
【0010】
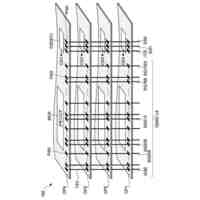
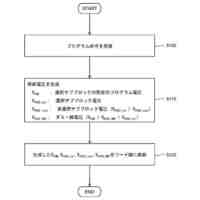
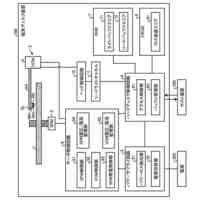
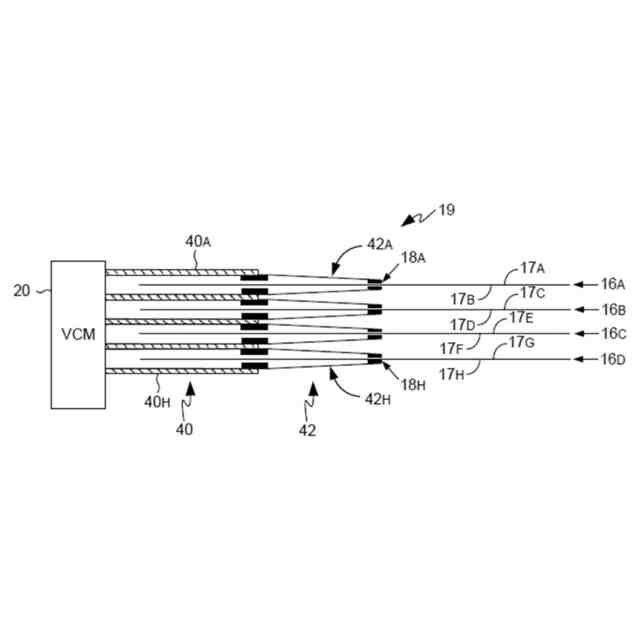
図2A及び図2Bは、本開示の態様による、ディスクドライブ15の形態のデータ記憶デバイスの上面図及び側面図の概念ブロック図を示す。ディスクドライブ15は、制御回路22、アクチュエータアームアセンブリ19、及び複数のハードディスク16A、16B、16C、16D(「ハードディスク16」)を備える。制御回路22は、回転位置決め最適化回路30(「RPO回路30」)を備える。一実施形態では、制御回路22は、ホスト44から受信したアクセスコマンド(例えば、読み取りコマンド及び書き込みコマンド)を記憶するためのコマンドキューを維持し、RPO回路30は、キュー内のコマンドを実行する順序を決定する。図2Cは、アクセスコマンドと関連付けられた動作特性に基づいて複数の異なるシーク時間モデルから選択されたシーク時間モデルを使用してアクセスコマンドのアクセス時間を決定することを含む、本開示の態様による、制御回路22のRPO回路30がディスクドライブ15の動作を制御する際に実施又は実行し得る、例示的な方法80のフローチャートを示す。一実施形態では、動作特性は、アクセスコマンドのシークアクセスパターンを含む。別の実施形態では、動作特性は、圧電(piezoelectric、PZT)アクチュエータストロークを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
記憶装置
1日前
トヨタ自動車株式会社
情報処理装置
16日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
3日前
ルネサスエレクトロニクス株式会社
不揮発性半導体記憶装置
24日前
ローム株式会社
不揮発性メモリ装置
3日前
ローム株式会社
不揮発性メモリ装置
3日前
ローム株式会社
不揮発性メモリ装置
21日前
ローム株式会社
不揮発性メモリ装置
17日前
株式会社半導体エネルギー研究所
記憶装置、及び記憶装置の駆動方法
22日前
ローム株式会社
半導体集積回路装置
21日前
国立大学法人東京科学大学
半導体装置および半導体チップ
1か月前
キオクシア株式会社
半導体記憶装置
1か月前
ソフトバンクグループ株式会社
システム
2か月前
ソフトバンクグループ株式会社
システム
2か月前
花王株式会社
磁気ディスク基板用研磨液
16日前
ローム株式会社
音再生マイクロコントローラ
2か月前
株式会社東芝
磁気ディスク装置
2か月前
ミネベアミツミ株式会社
ハードディスク駆動装置
29日前
日本発條株式会社
ディスク装置用サスペンション
2か月前
国立大学法人京都大学
データ読み出し方法および装置
3日前
花王株式会社
磁気ディスク基板用研磨液の製造方法
14日前
花王株式会社
磁気ディスク基板用研磨液の製造方法
14日前
花王株式会社
磁気ディスク基板用研磨液の製造方法
14日前
キオクシア株式会社
メモリシステム及びメモリデバイス
1か月前
株式会社半導体エネルギー研究所
半導体装置
1か月前
株式会社半導体エネルギー研究所
半導体装置
1日前
株式会社半導体エネルギー研究所
半導体装置
1日前
NECプラットフォームズ株式会社
テープリフター機構、および磁気テープ装置
16日前
浙江工業大学
二重らせん構造の録音と再生のためのスケジューリング方法
2か月前
株式会社東芝
ディスク装置
7日前
ルネサスエレクトロニクス株式会社
不良解析装置および不良解析方法
2か月前
株式会社東芝
磁気ディスク装置
2か月前
株式会社東芝
磁気ディスク装置
2か月前
株式会社東芝
磁気ディスク装置
16日前
株式会社フジミインコーポレーテッド
研磨用組成物および磁気ディスク基板の製造方法
2か月前
日本発條株式会社
ベースプレート及びその製造方法、ヘッドサスペンション、並びに記録装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ