TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025064723
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174681
出願日
2023-10-06
発明の名称
電子機器、制御方法、及びプログラム
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
主分類
H04N
23/60 20230101AFI20250410BHJP(電気通信技術)
要約
【課題】撮像される物体の画像に基づいて、物体までの距離などを算出する精度を高め得る電子機器、制御方法、及びプログラムを提供することにある。
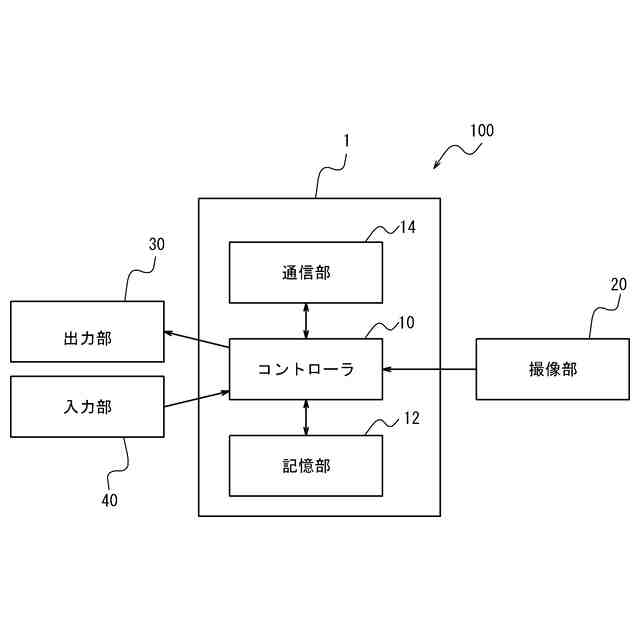
【解決手段】電子機器は、撮像部と、撮像部によって撮像される物体の画像に基づいて物体までの距離を示す情報を生成する制御部と、を備える。制御部は、撮像部の高さであって所定の平面に対する実際の高さを示す第1高さ情報と、物体の接地位置から物体の所定の位置までの実際の高さを示す第2高さ情報と、物体が撮像された画像に基づいて得られる距離情報であって、物体の接地位置に対応する距離を示す第1距離情報と、物体が撮像された画像に基づいて得られる距離情報であって、物体の所定の位置に対応する距離を示す第2距離情報と、に基づいて、物体までの距離を示す第3距離情報を生成する。
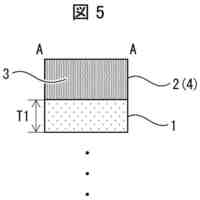
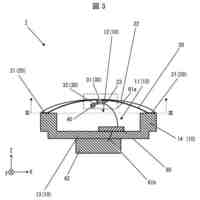
【選択図】図5
特許請求の範囲
【請求項1】
撮像部と、
前記撮像部によって撮像される物体の画像に基づいて、当該物体までの距離を示す情報を生成する制御部と、を備え、
前記制御部は、
前記撮像部の高さであって所定の平面に対する実際の高さを示す第1高さ情報と、
前記物体の接地位置から当該物体の所定の位置までの実際の高さを示す第2高さ情報と、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記接地位置に対応する距離を示す第1距離情報と、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記所定の位置に対応する距離を示す第2距離情報と、
に基づいて、
前記物体までの距離を示す第3距離情報を生成する、電子機器。
続きを表示(約 1,300 文字)
【請求項2】
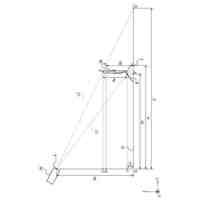
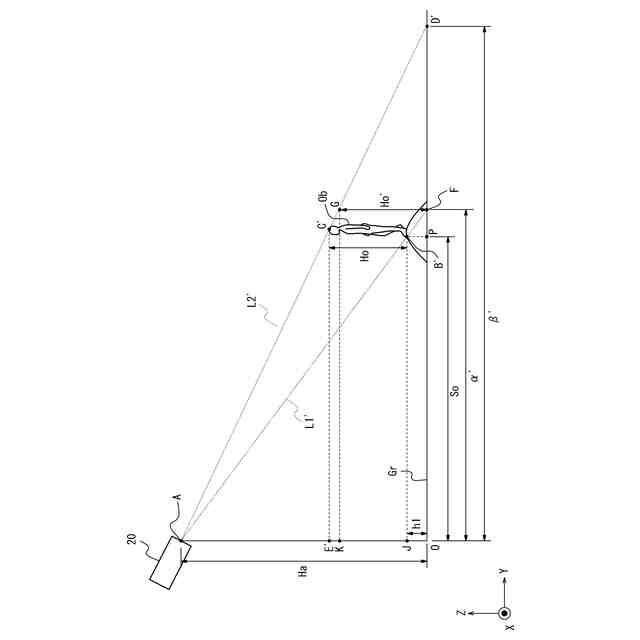
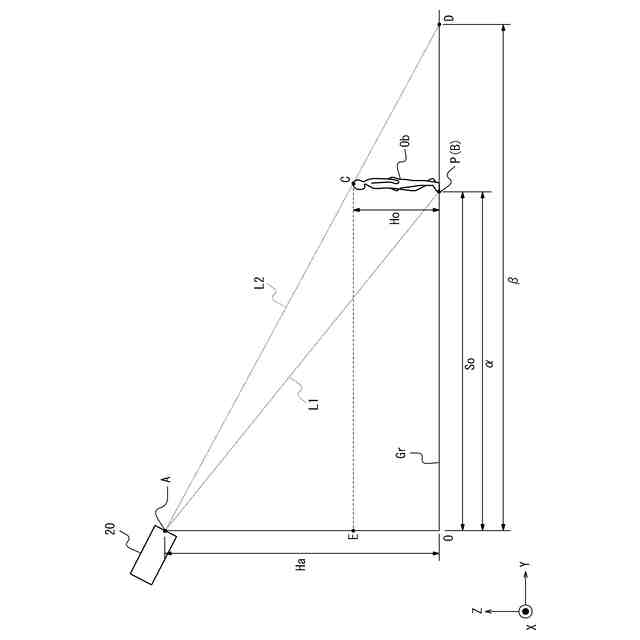
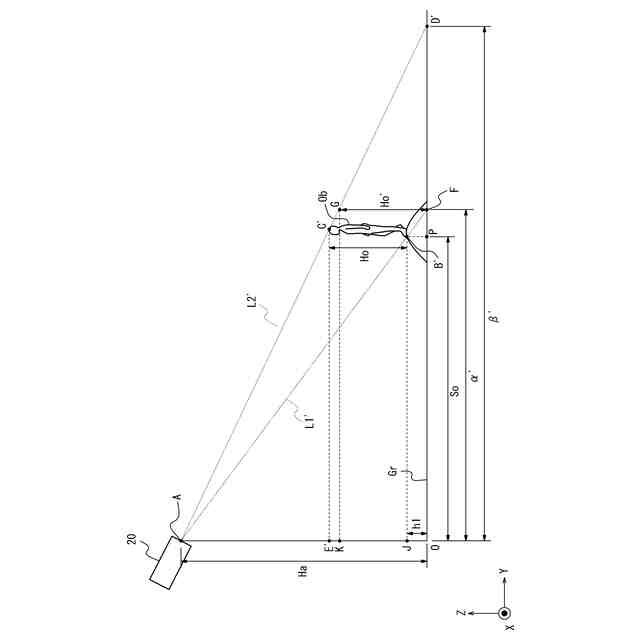
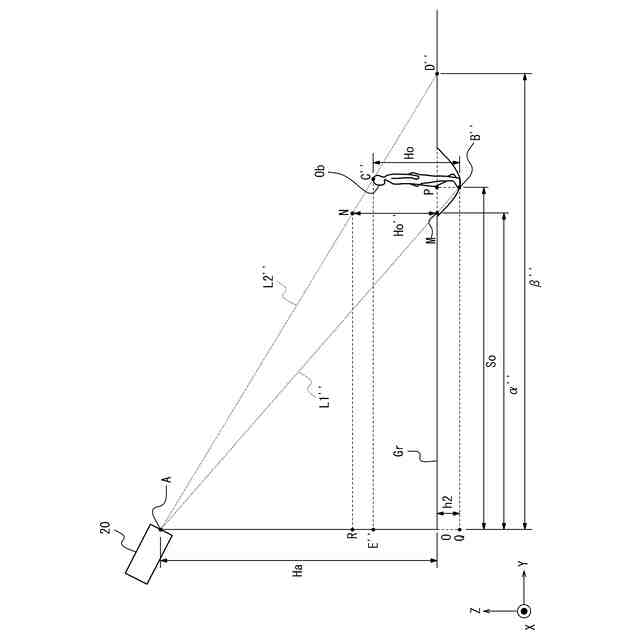
前記第1距離情報は、前記撮像部の位置と前記物体の接地位置とを通る第1直線が前記所定の平面と交わる交点と、前記撮像部の位置から前記所定の平面に下ろす垂線の交点との距離を示す情報である、請求項1に記載の電子機器。
【請求項3】
前記第2距離情報は、前記撮像部の位置と前記物体の前記所定の位置とを通る第2直線が前記所定の平面と交わる交点と、前記撮像部の位置から前記所定の平面に下ろす垂線の交点との距離を示す情報である、請求項1に記載の電子機器。
【請求項4】
前記制御部は、前記物体の位置において、前記第1直線の垂直方向成分と、前記第2直線の垂直方向成分との差分が、前記第2高さ情報が示す高さと所定の誤差内で等しくなる場合、前記第3距離情報を生成する、請求項3に記載の電子機器。
【請求項5】
前記第3距離情報は、前記撮像部の位置から前記所定の平面に下ろす垂線の交点と、前記物体の接地位置から前記所定の平面に下ろす垂線の交点との距離を示す情報である、請求項1に記載の電子機器。
【請求項6】
前記制御部は、前記第3距離情報に基づいて、前記物体の接地位置の前記所定の平面に対する高さを示す情報を生成する、請求項1に記載の電子機器。
【請求項7】
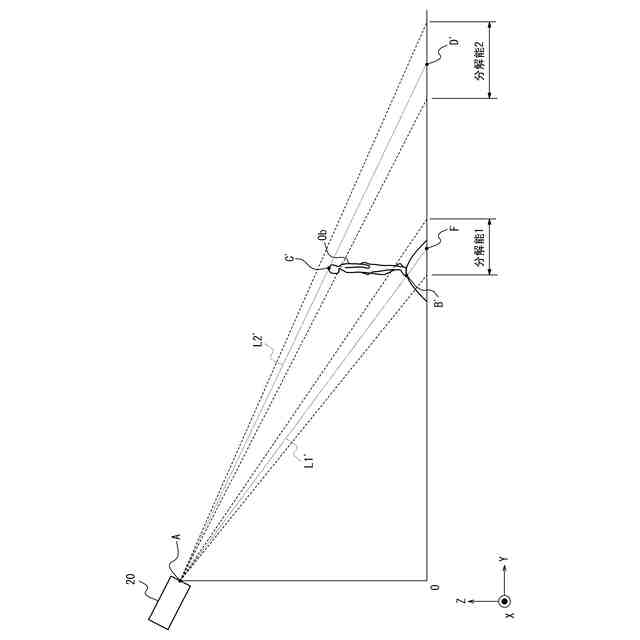
前記第1距離情報は、前記物体が撮像された画像において前記接地位置に対応する画素から取得可能な第1最短距離及び第1最長距離の何れかであり、
前記第2距離情報は、前記物体が撮像された画像において前記所定の位置に対応する画素から取得可能な第2最短距離及び第2最長距離の何れかである、請求項1に記載の電子機器。
【請求項8】
前記制御部は、前記第3距離情報に基づいて、前記撮像部によって撮像される画像上の座標を、前記所定の平面状の座標に変換するパラメータを補正する、請求項1に記載の電子機器。
【請求項9】
前記制御部は、前記第2高さ情報を、前記電子機器1以外の他の電子機器から取得する、請求項1に記載の電子機器。
【請求項10】
撮像部によって撮像される物体の画像に基づいて、当該物体までの距離を示す情報を生成する電子機器の制御方法であって、
前記撮像部の高さであって所定の平面に対する実際の高さを示す第1高さ情報を取得するステップと、
前記物体の接地位置から当該物体の所定の位置までの実際の高さを示す第2高さ情報を取得するステップと、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記接地位置に対応する距離を示す第1距離情報を取得するステップと、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記所定の位置に対応する距離を示す第2距離情報を取得するステップと、
前記第1高さ情報、前記第2高さ情報、前記第1距離情報、及び前記第2距離情報に基づいて、前記物体までの距離を示す第3距離情報を生成するステップと、
を含む、電子機器の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、電子機器、制御方法、及びプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、例えば道路監視システムなどを用いて、監視エリアの道路平面とカメラとの位置関係を予め得ることにより、当該カメラが取得する情報から、自動車のような物体の位置又は速度などを計測する手法が知られている。このようなシステムにおけるカメラのキャリブレーション方法として、例えば特許文献1は、カメラにより撮像された物体の画像から検出した複数の特徴点の座標から、道路平面パラメータを算出する手法を提案している。
【0003】
路面のような平面的な土地の表面は、厳密に平坦ということは想定し難く、実際には多少の凹凸などを含むのが通常である。このように、平坦でない実際の路面などにおいては、カメラが取得する情報から、自動車のような物体の位置などを精度良く計測できないことがある。
【先行技術文献】
【特許文献】
【0004】
特開2003-259357号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えばデジタルカメラのような撮像部によって撮像される物体の画像に基づいて、その物体までの距離を算出する精度を高めることは有利である。
【0006】
本開示の目的は、撮像される物体の画像に基づいて、当該物体までの距離などを算出する精度を高め得る電子機器、制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
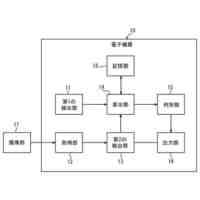
一実施形態に係る電子機器は、
撮像部と、
前記撮像部によって撮像される物体の画像に基づいて、当該物体までの距離を示す情報を生成する制御部と、を備える。
前記制御部は、
前記撮像部の高さであって所定の平面に対する実際の高さを示す第1高さ情報と、
前記物体の接地位置から当該物体の所定の位置までの実際の高さを示す第2高さ情報と、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記接地位置に対応する距離を示す第1距離情報と、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記所定の位置に対応する距離を示す第2距離情報と、
に基づいて、
前記物体までの距離を示す第3距離情報を生成する。
【0008】
一実施形態に係る制御方法は、
撮像部によって撮像される物体の画像に基づいて、当該物体までの距離を示す情報を生成する電子機器の制御方法であって、
前記撮像部の高さであって所定の平面に対する実際の高さを示す第1高さ情報を取得するステップと、
前記物体の接地位置から当該物体の所定の位置までの実際の高さを示す第2高さ情報を取得するステップと、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記接地位置に対応する距離を示す第1距離情報を取得するステップと、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記所定の位置に対応する距離を示す第2距離情報を取得するステップと、
前記第1高さ情報、前記第2高さ情報、前記第1距離情報、及び前記第2距離情報に基づいて、前記物体までの距離を示す第3距離情報を生成するステップと、
を含む。
【0009】
一実施形態に係るプログラムは、
撮像部によって撮像される物体の画像に基づいて、当該物体までの距離を示す情報を生成する電子機器に、
前記撮像部の高さであって所定の平面に対する実際の高さを示す第1高さ情報を取得するステップと、
前記物体の接地位置から当該物体の所定の位置までの実際の高さを示す第2高さ情報を取得するステップと、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記接地位置に対応する距離を示す第1距離情報を取得するステップと、
前記物体が撮像された画像に基づいて得られる距離情報であって、前記物体の前記所定の位置に対応する距離を示す第2距離情報を取得するステップと、
前記第1高さ情報、前記第2高さ情報、前記第1距離情報、及び前記第2距離情報に基づいて、前記物体までの距離を示す第3距離情報を生成するステップと、
を実行させる。
【発明の効果】
【0010】
一実施形態によれば、撮像される物体の画像に基づいて、当該物体までの距離などを算出する精度を高め得る電子機器、制御方法、及びプログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
京セラ株式会社
ヒータ
2か月前
京セラ株式会社
構造体
21日前
京セラ株式会社
照明装置
20日前
京セラ株式会社
弾性波装置
1か月前
京セラ株式会社
粒子分離装置
1か月前
京セラ株式会社
粒子分離装置
1か月前
京セラ株式会社
電力変換装置
2か月前
京セラ株式会社
粒子分離装置
1か月前
京セラ株式会社
粒子分離装置
1か月前
京セラ株式会社
電磁波抑制材料
今日
京セラ株式会社
エネルギーシステム
1か月前
京セラ株式会社
制御装置及び制御方法
1か月前
京セラ株式会社
研磨治具および研磨装置
1か月前
京セラ株式会社
フィルタおよび通信装置
2か月前
京セラ株式会社
積層セラミックコンデンサ
26日前
京セラ株式会社
配線基板および半導体デバイス
1か月前
京セラ株式会社
配線基板および半導体デバイス
1か月前
京セラ株式会社
送電装置、方法及びプログラム
1か月前
京セラ株式会社
電源制御装置及び電源制御方法
今日
京セラ株式会社
電源制御装置及び電源制御方法
今日
京セラ株式会社
電子機器及び電子機器の施工方法
1か月前
京セラ株式会社
電源管理システム及び電源制御方法
1か月前
京セラ株式会社
液滴吐出ヘッドおよび液滴吐出装置
1か月前
国立大学法人東京科学大学
伝送回路
1か月前
京セラ株式会社
燃料電池モジュール及び燃料電池装置
1か月前
京セラ株式会社
電子機器、制御方法、及びプログラム
1か月前
京セラ株式会社
送電装置、制御方法及び制御プログラム
1か月前
京セラ株式会社
送電装置、制御方法及び制御プログラム
1か月前
京セラ株式会社
配線基板およびそれを用いた実装構造体
1か月前
京セラ株式会社
ジャイロ式振動計、電子聴診器、電子機器
2か月前
京セラ株式会社
電子機器、算出方法、及び算出プログラム
2か月前
京セラ株式会社
燃料電池セルスタックおよび燃料電池装置
1か月前
京セラ株式会社
透光性磁性材料、光学素子および光学装置
1か月前
京セラ株式会社
ボールトライアル、および手術器具システム
1か月前
京セラ株式会社
ホルダ、切削工具及び切削加工物の製造方法
1か月前
京セラ株式会社
ホルダ、切削工具及び切削加工物の製造方法
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ