TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064125
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023173628
出願日
2023-10-05
発明の名称
回転検出システムの制御方法、及び、回転検出システムの制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
G01D
5/20 20060101AFI20250410BHJP(測定;試験)
要約
【課題】初期診断から本検出への移行の際に、円滑に、変換器の出力を実際の回転角に収束させやすくすることができる回転検出システムの制御方法、及び、回転検出システムの制御装置を提供する。
【解決手段】回転検出システム100は、回転電機10の回転角φに応じた出力信号D
1
,D
2
を出力する回転検出器11と、回転角φのフィードバックにより、出力信号D
1
,D
2
を回転角φに変換する変換器12と、を備える。回転角φの検出を開始するときには、模擬信号D
1
′,D
2
′を用いて、変換器12が正常に動作するか否かを診断する初期診断を実行し、初期診断の完了後、静定処理を実行し、静定処理の完了後、回転角φの本検出を開始する。そして、静定処理において回転角検出値φ
det
が実回転角φ
act
に収束しないときには、変換器12の設定を変更して、初期診断、静定処理、または、初期診断及び静定処理、を実行する。
【選択図】図7
特許請求の範囲
【請求項1】
回転電機の回転角に応じた出力信号を出力する回転検出器と、前記回転角のフィードバックにより、前記出力信号を前記回転角に変換する変換器と、を備える回転検出システムの制御方法であって、
前記回転角の検出を開始するときに、前記出力信号の代わりに、特定の前記回転角に対応する前記出力信号を模擬した模擬信号を用いて、前記変換器が正常に動作するか否かを診断する初期診断を実行し、
前記初期診断の完了後、前記回転電機が回転を始める前に、前記出力信号を前記変換器に入力することによって、前記変換器が出力する前記回転角である回転角検出値を、実際の前記回転角である実回転角に収束させる静定処理を実行し、
前記静定処理の完了後、前記回転角の本検出を開始し、
前記静定処理において前記回転角検出値が前記実回転角に収束しないときには、前記変換器の設定を変更して、前記初期診断、前記静定処理、または、前記初期診断及び前記静定処理、を実行する、
回転検出システムの制御方法。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の回転検出システムの制御方法であって、
前記回転電機の停止させたときの前記回転角である停止時回転角を記憶し、
対応する前記回転角が異なる複数の前記模擬信号を使用した複数の前記初期診断を実行し、
前記静定処理において前記回転角検出値が前記実回転角に収束しないときには、前記停止時回転角に基づき、前記初期診断の順序を変更する、
回転検出システムの制御方法。
【請求項3】
請求項2に記載の回転検出システムの制御方法であって、
最後に実施する前記初期診断の前記回転角と、前記停止時回転角と、の差が小さくなるように、前記初期診断の順序を決定する、
回転検出システムの制御方法。
【請求項4】
請求項1に記載の回転検出システムの制御方法であって、
前記回転検出器はレゾルバであり、
前記静定処理において前記回転角検出値が前記実回転角に収束しないときには、励磁信号の周波数である励磁周波数を変更して前記静定処理を実行する、
回転検出システムの制御方法。
【請求項5】
請求項4に記載の回転検出システムの制御方法であって、
前記励磁周波数を前記本検出における前記励磁周波数よりも小さい周波数に設定して、前記静定処理を実行する、
回転検出システムの制御方法。
【請求項6】
請求項5に記載の回転検出システムの制御方法であって、
前記本検出における前記励磁周波数は、前記励磁周波数が高くなるほど前記変換器のゲインが低下する周波数帯に属し、
前記静定処理における前記励磁周波数は、前記ゲインが前記励磁周波数によらず一定である周波数帯に属する、
回転検出システムの制御方法。
【請求項7】
請求項1に記載の回転検出システムの制御方法であって、
前記変換器は、前記出力信号のノイズを低減する入力フィルタを含み、
前記静定処理において前記回転角検出値が前記実回転角に収束しないときには、前記入力フィルタの時定数を変更して、前記静定処理を実行する、
回転検出システムの制御方法。
【請求項8】
請求項7に記載の回転検出システムの制御方法であって、
前記時定数を、前記本検出における前記時定数よりも小さい値に設定して、前記静定処理を実行する、
回転検出システムの制御方法。
【請求項9】
請求項8に記載の回転検出システムの制御方法であって、
前記時定数を徐々に小さくしながら前記静定処理を実行する、
回転検出システムの制御方法。
【請求項10】
請求項1に記載の回転検出システムの制御方法であって、
前記変換器は、前記出力信号のノイズを低減する入力フィルタと、前記入力フィルタのオン/オフを切り替えるフィルタ切替スイッチと、を含み、
前記静定処理において前記回転角検出値が前記実回転角に収束しないときには、前記入力フィルタをオフにして、前記静定処理を実行する、
回転検出システムの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転電機等の回転角(回転位置)を検出する回転検出システムの制御方法及び制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1は、レゾルバに入力する励磁信号の振幅と位相を調整することにより、電動機等の回転角を精度よく検出する検出装置を開示している。
【先行技術文献】
【特許文献】
【0003】
特許第7108231号
【発明の概要】
【発明が解決しようとする課題】
【0004】
回転電機の回転角(回転位置)は、回転角に応じた信号を出力する回転検出器と、回転検出器の出力信号を回転角に変換する変換器と、を有する回転検出システムによって検出される。例えば、回転電機の回転角は、レゾルバの出力信号をR/D(レゾルバデジタル)コンバータで回転角に変換することによって、検出される。
【0005】
回転検出システムによって回転角の検出を開始するとき、すなわち回転検出システムの始動時には、回転検出システムは、通常、回転角を正しく検出し得るか否か診断する初期診断を実施してから使用される。具体的には、初期診断では、特定の回転角に対応する出力信号を模した模擬信号を変換器に入力することにより、変換器が正常に動作するか否かを確認し、その後、実際の出力信号を変換器に入力することにより、実際的な回転角の検出(本検出)が開始される。
【0006】
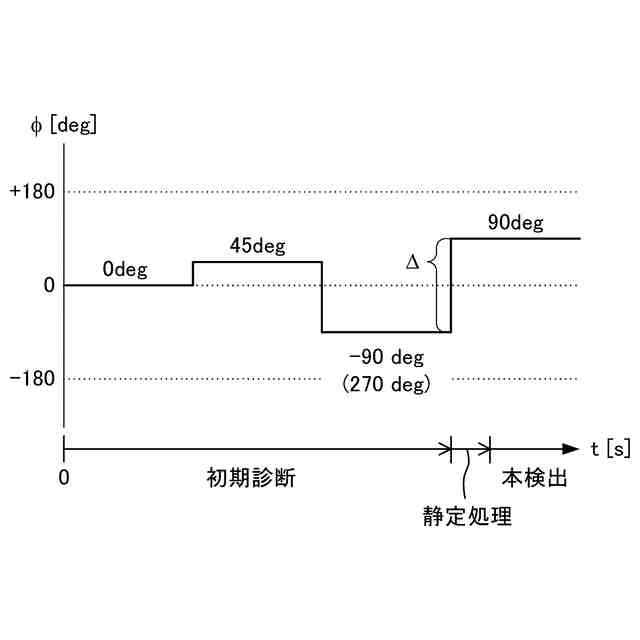
しかし、回転検出システムは、初期診断を実施したことによって、却って、回転角を検出し難くなってしまう場合がある。具体的には、初期診断で使用する模擬信号が表す回転角と、本検出で変換器に最初に入力される実際の出力信号が表す回転角と、の差異が大きい場合、すなわち初期診断と本検出で回転角の変化が大きい場合、本検出を開始したときに、変換器の出力が実際の回転角に収束し難くなり、回転角を検出し難くなることがある。
【0007】
本発明は、初期診断から本検出への移行の際に、円滑に、変換器の出力を実際の回転角に収束させやすくすることができる回転検出システムの制御方法、及び、回転検出システムの制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
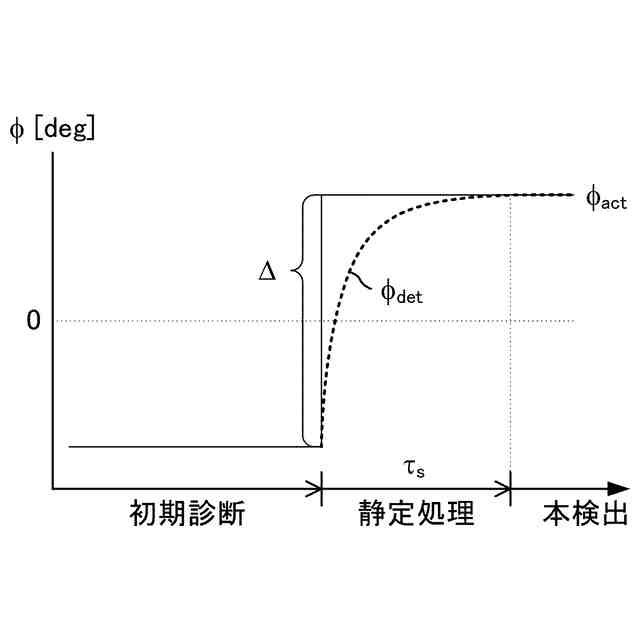
本発明のある態様は、回転電機の回転角に応じた出力信号を出力する回転検出器と、回転角のフィードバックにより、出力信号を回転角に変換する変換器と、を備える回転検出システムの制御方法である。この回転検出システムの制御方法では、回転角の検出を開始するときに、出力信号の代わりに、特定の回転角に対応する出力信号を模擬した模擬信号を用いて、変換器が正常に動作するか否かを診断する初期診断を実行し、初期診断の完了後、回転電機が回転を始める前に、出力信号を変換器に入力することによって、変換器が出力する回転角である回転角検出値を、実際の回転角である実回転角に収束させる静定処理を実行し、静定処理の完了後、回転角の本検出を開始する。そして、静定処理において回転角検出値が実回転角に収束しないときには、変換器の設定を変更して、初期診断、静定処理、または、初期診断及び静定処理、を実行する。
【発明の効果】
【0009】
本発明によれば、初期診断から本検出への移行の際に、円滑に、変換器の出力を実際の回転角に収束させやすくすることができる回転検出システムの制御方法、及び、回転検出システムの制御装置を提供することができる。
【図面の簡単な説明】
【0010】
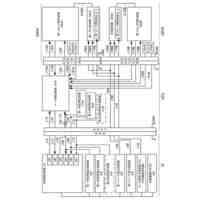
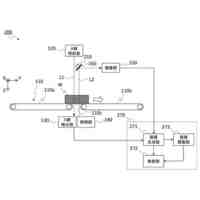
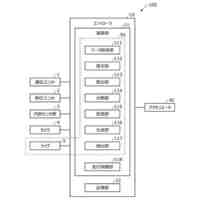
図1は、回転検出システムの構成を示すブロック図である。
図2は、変換回路の構成を示すブロック図である。
図3は、初期診断から本検出にかけての回転角の推移を示す説明図である。
図4は、静定処理における理想的な回転角検出値の推移を示す説明図である。
図5は、静定処理における現実的な回転角検出値の推移を示す説明図である。
図6は、変換器のゲイン及び位相を示す説明図である。
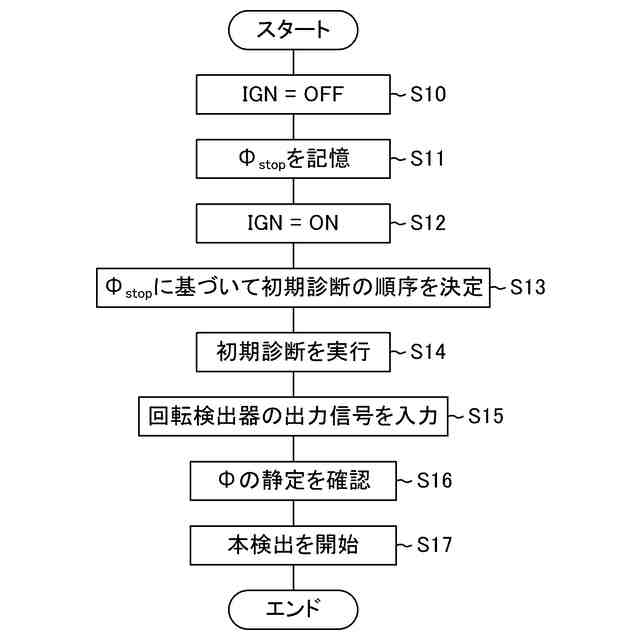
図7は、回転角の検出を開始するときのフローチャートである。
図8は、回転角の検出を開始するときのフローチャートである。
図9は、回転角の検出を開始するときのフローチャートである。
図10は、回転角の検出を開始するときのフローチャートである。
図11は、回転角の検出を開始するときのフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
19日前
日本精機株式会社
位置検出装置
15日前
東レ株式会社
シート状物の検査方法
13日前
エイブリック株式会社
電流検出回路
12日前
栄進化学株式会社
浸透探傷用濃縮液
5日前
株式会社ハシマ
検針機
18日前
株式会社ミツトヨ
画像測定機
今日
東ソー株式会社
自動分析装置及び方法
15日前
株式会社チノー
放射光測温装置
12日前
日本特殊陶業株式会社
ガスセンサ
12日前
株式会社 キョーワ
食品搬送装置
12日前
日本特殊陶業株式会社
ガスセンサ
12日前
大和製衡株式会社
計量装置
5日前
理研計器株式会社
ガス検出器
今日
理研計器株式会社
ガス検出器
今日
理研計器株式会社
ガス検出器
今日
日本碍子株式会社
ガスセンサ
12日前
大成建設株式会社
画像表示システム
8日前
理研計器株式会社
ガス検出器
今日
株式会社熊谷組
計測システム
5日前
理研計器株式会社
ガス検出器
今日
富士電機株式会社
エンコーダ
13日前
株式会社 システムスクエア
検査装置
6日前
TDK株式会社
温度センサ
13日前
東洋計器株式会社
超音波式流量計
5日前
東洋計器株式会社
超音波式流量計
5日前
株式会社デンソー
試験装置
8日前
株式会社ヨコオ
シートコンタクタ
15日前
東洋計器株式会社
超音波式流量計
5日前
オムロン株式会社
光電センサ
12日前
本田技研工業株式会社
物体検出装置
18日前
ダイハツ工業株式会社
凹部の深さ測定方法
18日前
東洋製罐株式会社
巻締寸法測定装置
7日前
シチズンファインデバイス株式会社
圧力検出装置
12日前
シチズンファインデバイス株式会社
圧力検出装置
12日前
スタンレー電気株式会社
車両前方視認装置
18日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ