TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062369
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171381
出願日
2023-10-02
発明の名称
情報処理装置、情報処理方法、及びプログラム
出願人
ソニーグループ株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
7/80 20170101AFI20250407BHJP(計算;計数)
要約
【課題】環境を撮像するカメラの補正をより容易に行う。
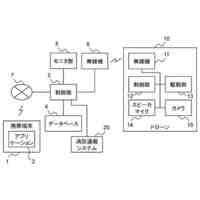
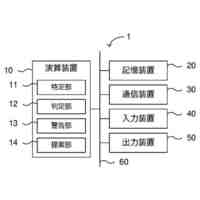
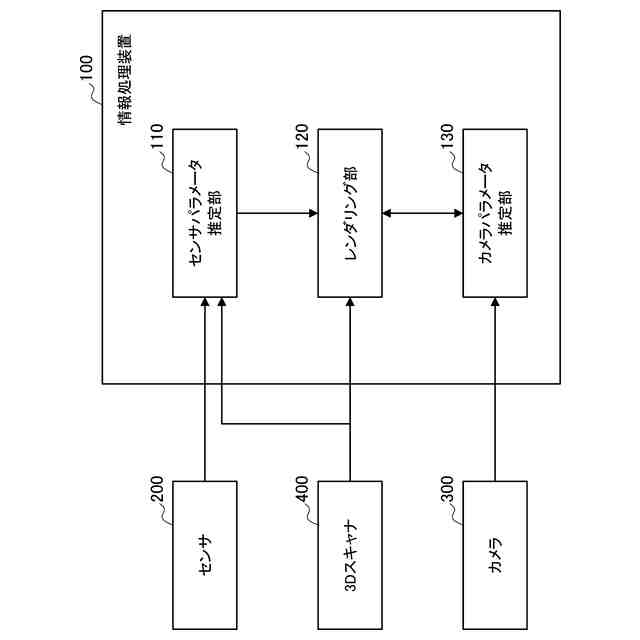
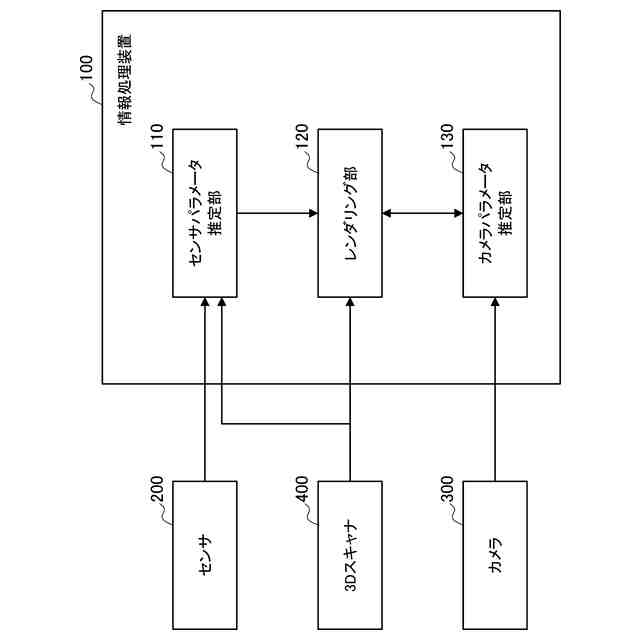
【解決手段】3Dスキャナで測定した環境の三次元データと、前記環境を撮像するカメラのカメラパラメータとに基づいて、前記カメラで撮像されたカメラ画像に対応するレンダリング画像を生成するレンダリング部と、前記カメラ画像と、前記レンダリング画像との差分を抽出し、前記差分がより小さくなるように前記カメラパラメータを更新するカメラパラメータ推定部と、を備える、情報処理装置。
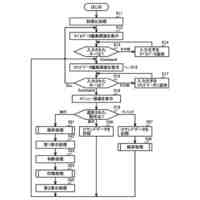
【選択図】図2
特許請求の範囲
【請求項1】
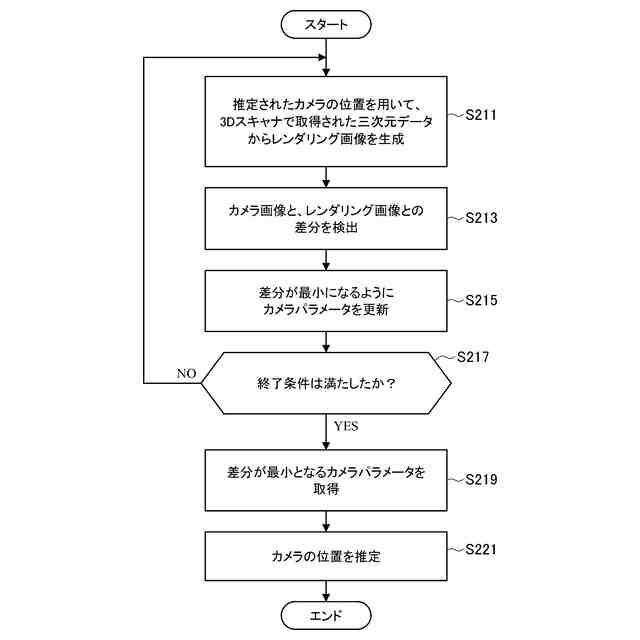
3Dスキャナで測定した環境の三次元データと、前記環境を撮像するカメラのカメラパラメータとに基づいて、前記カメラで撮像されたカメラ画像に対応するレンダリング画像を生成するレンダリング部と、
前記カメラ画像と、前記レンダリング画像との差分を抽出し、前記差分がより小さくなるように前記カメラパラメータを更新するカメラパラメータ推定部と、
を備える、情報処理装置。
続きを表示(約 810 文字)
【請求項2】
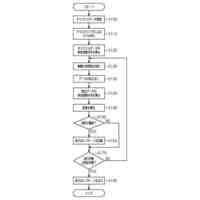
前記レンダリング部及び前記カメラパラメータ推定部は、前記差分が閾値以下になるまで前記レンダリング画像の生成と、前記カメラパラメータの更新とを繰り返し実行する、請求項1に記載の情報処理装置。
【請求項3】
前記カメラパラメータは、前記カメラの位置を表す外部パラメータと、前記カメラ画像と前記環境との対応関係を示す内部パラメータとを含む、請求項1に記載の情報処理装置。
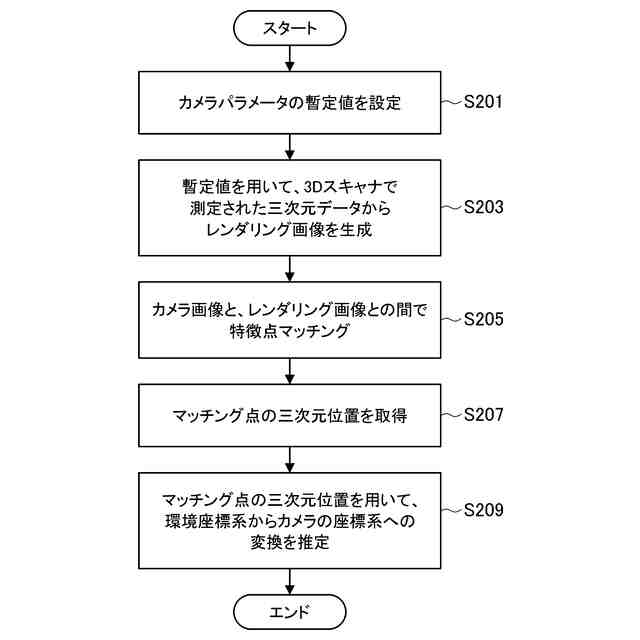
【請求項4】
前記外部パラメータの初期値は、前記カメラ画像と、前記外部パラメータの暫定値を用いて生成された前記レンダリング画像との特徴点マッチングにて抽出されたマッチング点を用いて推定される、請求項3に記載の情報処理装置。
【請求項5】
前記カメラは、オブジェクトの位置を検出可能なセンサが搭載された機器に搭載され、
前記外部パラメータの前記暫定値は、前記センサの位置に基づいて決定される、請求項4に記載の情報処理装置。
【請求項6】
前記機器は、移動体である、請求項5に記載の情報処理装置。
【請求項7】
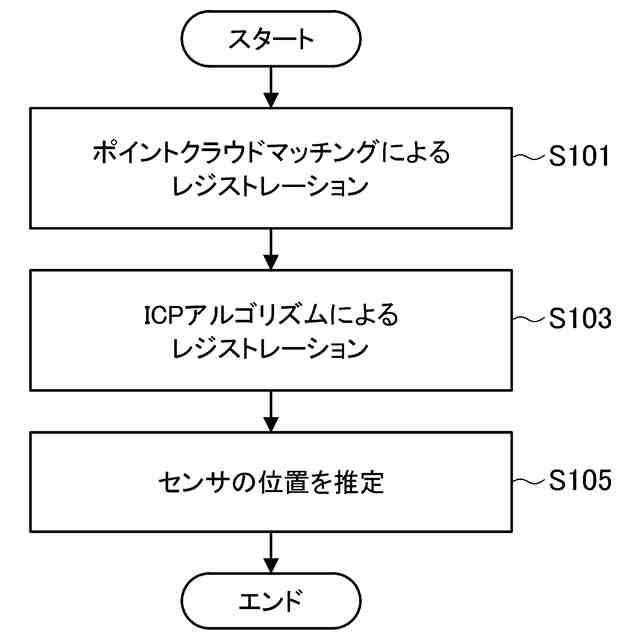
前記センサの位置を含むセンサパラメータを推定するセンサパラメータ推定部をさらに備える、請求項5に記載の情報処理装置。
【請求項8】
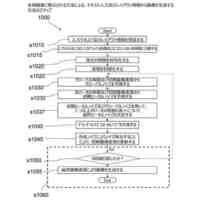
前記センサパラメータ推定部は、前記三次元データと、前記センサで取得した前記環境のポイントクラウドデータとの位置合わせを行うことで、前記センサパラメータを推定する、請求項7に記載の情報処理装置。
【請求項9】
前記センサパラメータ推定部は、複数段階に分けて前記位置合わせを行う、請求項8に記載の情報処理装置。
【請求項10】
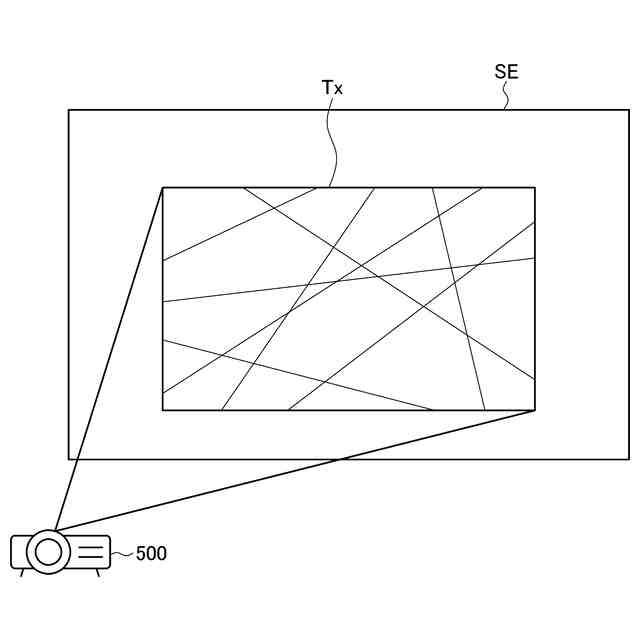
前記環境は、少なくとも三方向以上が面で閉ざされた静止環境である、請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置、情報処理方法、及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、LiDAR(Light Detection And Ranging)などのオブジェクトの位置を検出可能なセンサと、オブジェクトを撮像するカメラとを用いて周辺環境をセンシングする技術の開発が進んでいる。例えば、自動車では、LiDARと、カメラとを用いて環境をセンシングすることで、自動車を自動運転させる技術の開発が盛んに行われている。
【0003】
このような周辺環境をセンシングする技術では、センサにてセンシングされたデータと、カメラにて撮像された画像データとを適切に統合することが重要となる。具体的には、センサとカメラとの間の位置補正、及びカメラの内部パラメータの補正を行い、センサにてセンシングされたデータと、カメラにて撮像された画像データとを一体化することが重要となる。
【0004】
例えば、下記の特許文献1には、対象物を撮像可能なカメラ、及びレーザを用いて対象物の位置を検出可能なセンサの各々をキャリブレーションするためのマーカボードを用意することが記載されている。特許文献1に記載された技術では、複数の位置に設置されたマーカボードを同一の移動体に取り付けられたカメラ及びセンサによって検出することで、カメラとセンサとの間の位置補正を行うことができる。
【先行技術文献】
【特許文献】
【0005】
特開2021-38939号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載された技術は、専用のマーカボードを用意する必要があるため、一般のユーザが行うことは困難であった。特に、カメラは、他のカメラ又はセンサとの間の位置補正に加えて、内部パラメータの補正も行う必要があるため、カメラの補正をより容易に行うことが可能な技術が求められていた。
【0007】
そこで、本開示では、環境を撮像するカメラの補正をより容易に行うことが可能な、新規かつ改良された情報処理装置、情報処理方法、及びプログラムを提案する。
【課題を解決するための手段】
【0008】
本開示によれば、3Dスキャナで測定した環境の三次元データと、前記環境を撮像するカメラのカメラパラメータとに基づいて、前記カメラで撮像されたカメラ画像に対応するレンダリング画像を生成するレンダリング部と、前記カメラ画像と、前記レンダリング画像との差分を抽出し、前記差分がより小さくなるように前記カメラパラメータを更新するカメラパラメータ推定部と、を備える、情報処理装置が提供される。
【0009】
また、本開示によれば、3Dスキャナで測定した環境の三次元データと、前記環境を撮像するカメラのカメラパラメータとに基づいて、前記カメラで撮像されたカメラ画像に対応するレンダリング画像を生成することと、前記カメラ画像と、前記レンダリング画像との差分を抽出し、前記差分がより小さくなるように前記カメラパラメータを更新することと、を含む、コンピュータによる情報処理方法が提供される。
【0010】
さらに、本開示によれば、コンピュータを、3Dスキャナで測定した環境の三次元データと、前記環境を撮像するカメラのカメラパラメータとに基づいて、前記カメラで撮像されたカメラ画像に対応するレンダリング画像を生成するレンダリング部と、前記カメラ画像と、前記レンダリング画像との差分を抽出し、前記差分がより小さくなるように前記カメラパラメータを更新するカメラパラメータ推定部と、として機能させるための、プログラムが提供される。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
3日前
個人
人物再現システム
今日
有限会社ノア
データ読取装置
1日前
個人
広告提供システムおよびその方法
3日前
株式会社ザメディア
出席管理システム
8日前
個人
日誌作成支援システム
今日
トヨタ自動車株式会社
工程計画装置
8日前
トヨタ自動車株式会社
作業判定方法
9日前
ミサワホーム株式会社
情報処理装置
7日前
個人
ポイント還元付き配送システム
1日前
株式会社タクテック
商品取出集品システム
7日前
オベック実業株式会社
接続構造
今日
トヨタ自動車株式会社
情報処理システム
9日前
株式会社村田製作所
動き検知装置
7日前
ゼネラル株式会社
RFIDタグ付き物品
10日前
個人
コンテンツ配信システム
7日前
株式会社実身美
ワーキングシェアリングシステム
1日前
株式会社ドクター中松創研
生成AIの適切使用法
今日
株式会社国際電気
支援システム
10日前
トヨタ自動車株式会社
情報処理方法
9日前
富士通株式会社
画像生成方法
13日前
個人
プラットフォームシステム
7日前
株式会社エスシーシー
置き配システム
1日前
ブラザー工業株式会社
ラベルプリンタ
9日前
個人
注文管理システム及び注文管理プログラム
今日
株式会社 喜・扇
緊急事態対応円滑化システム
今日
株式会社K-model
運用設計資料作成装置
3日前
株式会社知財事業研究所
運行計画作成システム
7日前
トヨタ自動車株式会社
作業支援システム
7日前
日立建機株式会社
潤滑油診断システム
8日前
日立建機株式会社
作業機械の管理装置
10日前
株式会社マーケットヴィジョン
情報処理システム
今日
株式会社日立製作所
設計支援装置
8日前
トヨタ自動車株式会社
情報処理装置
今日
株式会社アイシン
情報提供システム
13日前
トヨタ自動車株式会社
車両用の情報処理装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ