TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059464
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169555
出願日
2023-09-29
発明の名称
移動ロボット
出願人
THK株式会社
代理人
弁理士法人秀和特許事務所
主分類
B64U
60/50 20230101AFI20250403BHJP(航空機;飛行;宇宙工学)
要約
【課題】接触面と接触しつつ作業を行うロボットにおいて、安定してより大きな力及びトルクを作用させる。
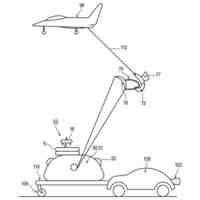
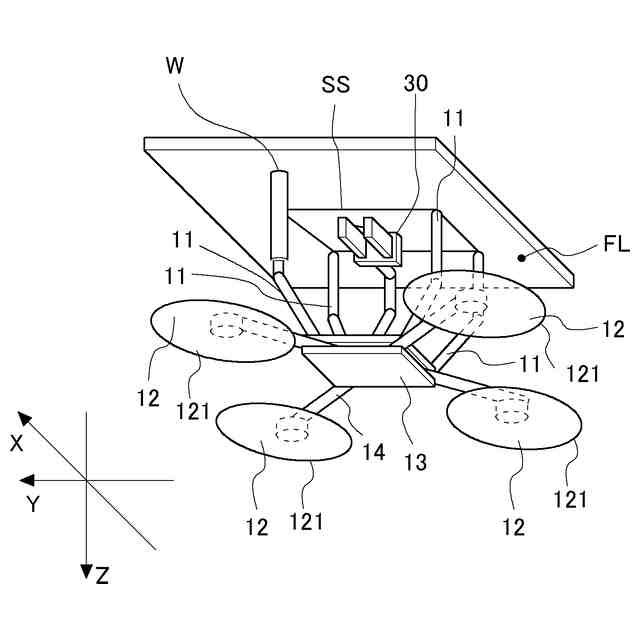
【解決手段】回転翼の駆動により推進力を発生させる推進ユニットを複数有する本体部と、本体部に設けられ、且つ、所定の接触面に接触して該本体部の少なくとも一部を支持可能な複数の支持部と、所定の作業を行う作業部と、作業部が所定の作業を行う場合に、推進ユニットを駆動することで、複数の支持部を所定の接触面に押し付ける力を発生させる制御部と、を備える。
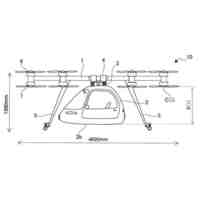
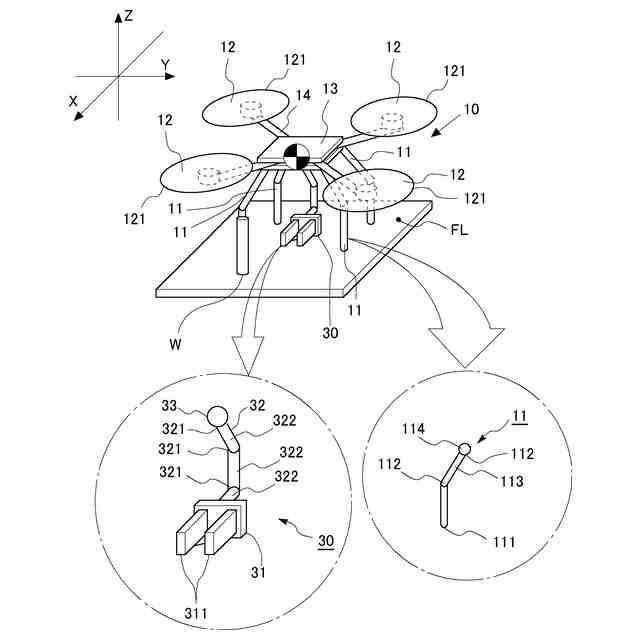
【選択図】図2
特許請求の範囲
【請求項1】
回転翼の駆動により推進力を発生させる推進ユニットを複数有する本体部と、
前記本体部に設けられ、且つ、所定の接触面に接触して該本体部を支持可能な複数の支持部と、
所定の作業を行う作業部と、
前記作業部が前記所定の作業を行う場合に、前記推進ユニットを駆動することで、前記複数の支持部を前記所定の接触面に押し付ける力を発生させる制御部と、
を備える、移動ロボット。
続きを表示(約 620 文字)
【請求項2】
前記制御部は、前記推進ユニットを駆動することで前記複数の支持部に発生する前記所定の接触面における垂直抗力の総和の位置が、前記複数の支持部が前記所定の接触面に接触する接触位置に応じた支持領域の内部になるように、前記推進ユニットで発生させる推進力を設定する、
請求項1に記載の移動ロボット。
【請求項3】
前記制御部は、前記支持領域の内部に、前記垂直抗力の総和の位置の目標となる目標領域を設定し、前記垂直抗力の総和の位置が前記目標領域内となるように、前記推進ユニットで発生させる推進力を調整する、
請求項2に記載の移動ロボット。
【請求項4】
前記複数の支持部のうち前記所定の接触面に接触している所定支持部の数が3つ以上である場合、前記支持領域は、前記所定支持部のそれぞれと前記所定の接触面との接触点を結んで形成される多角形領域である、
請求項2に記載の移動ロボット。
【請求項5】
前記制御部は、前記所定の作業を行う場合に、前記複数の支持部が前記所定の接触面上で静止する摩擦力を発生させるように、前記推進ユニットで発生させる推進力を設定する、
請求項1に記載の移動ロボット。
【請求項6】
前記複数の支持部は、前記本体部の重量を支持可能に該本体部に取り付けられた複数の脚部である、
請求項1に記載の移動ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行可能な移動ロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年では、無人飛行体が様々な用途に利用され、その開発が盛んに行われている。無人飛行体としては、無線操縦される無人ヘリコプタや、いわゆるドローンが利用されている。例えば、農業目的でのドローンの活用例としては、農薬散布、搭載されたカメラを用いての農作物の生育観察、農作物を霜害から保護するための気流生成等が例示できる(例えば、特許文献1を参照)。更に、農業目的に限らずその他の目的に広く利用できるように、無人飛行体に所定の作業を実行させるアーム等を設置して、飛行可能なロボットの開発も行われている(例えば、特許文献2を参照)。
【0003】
また、特許文献3には、推進ユニットによる飛行とともに地面に接地しながらの歩行動作を行う移動ロボットが開示されている。当該移動ロボットにおいては、2本の脚部による歩行が行われ、その歩行動作を行っているときにセンサによりロボット本体部の傾きが大きくなると、その傾きを所定の角度範囲に収まるように推進ユニットを用いてロボットの姿勢が制御される。
【先行技術文献】
【特許文献】
【0004】
特開2018-000015号公報
国際公開2016/193666号公報
特許第6733965号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロボットに例えばエンドエフェクタを取り付けて物体に対して作業を行うことが考えられる。しかし、飛行可能なロボットは比較的軽量であるため、作業時の物体からの反作用の影響を受けて姿勢を崩しやすい。また、飛行しながらの作業では、作業力、作業トルク、及び外乱に対応した反力を発生させることが容易でない。その結果、作業を行っているロボットの位置や姿勢が、所望の位置や姿勢に合わなくなる虞がある。また、位置や姿勢を維持するために、作業時に物体に作用させることができる力及びトルクが限られる。
【0006】
本発明は、上記した問題点に鑑みてなされたものであり、接触面と接触しつつ作業を行うロボットにおいて、安定してより大きな力及びトルクを作用させるロボット技術の提供を目的とする。
【課題を解決するための手段】
【0007】
本発明において、上記課題を解決するために、本発明の移動ロボットに接触面に接触する支持部を設けるとともに推進ユニットを制御する構成を採用した。その上で、当該移動ロボットにおいて、作業部により作業を行う際に、推進ユニットを用いて移動ロボットを接触面に押し付ける制御を行う制御部を設けた。このような構成によって、移動ロボットにおける安定した作業動作を実現することができる。
【0008】
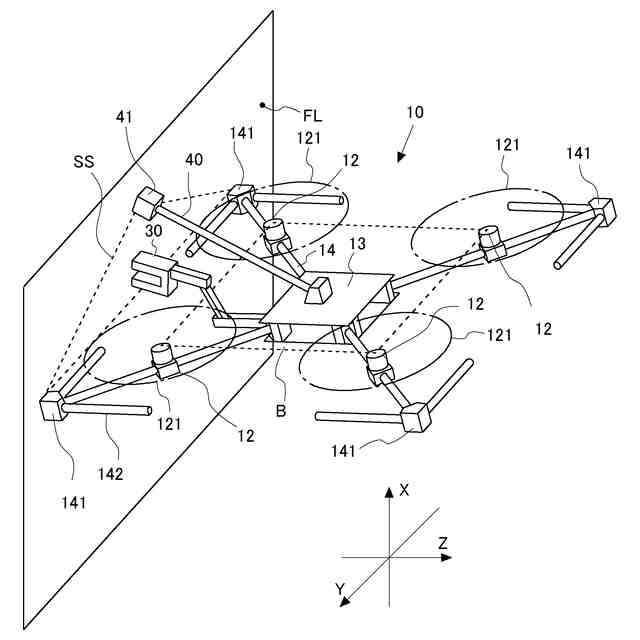
詳細には、本発明に係る移動ロボットは、回転翼の駆動により推進力を発生させる推進ユニットを複数有する本体部と、前記本体部に設けられ、且つ、所定の接触面に接触して該本体部の少なくとも一部を支持可能な複数の支持部と、所定の作業を行う作業部と、前
記作業部が前記所定の作業を行う場合に、前記推進ユニットを駆動することで、前記複数の支持部を前記所定の接触面に押し付ける力を発生させる制御部と、を備える。
【発明の効果】
【0009】
接触面と接触しつつ作業を行うロボットにおいて、安定してより大きな力及びトルクを作用させることができる。
【図面の簡単な説明】
【0010】
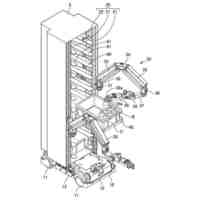
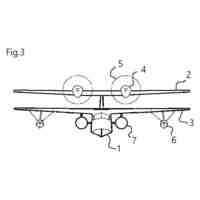
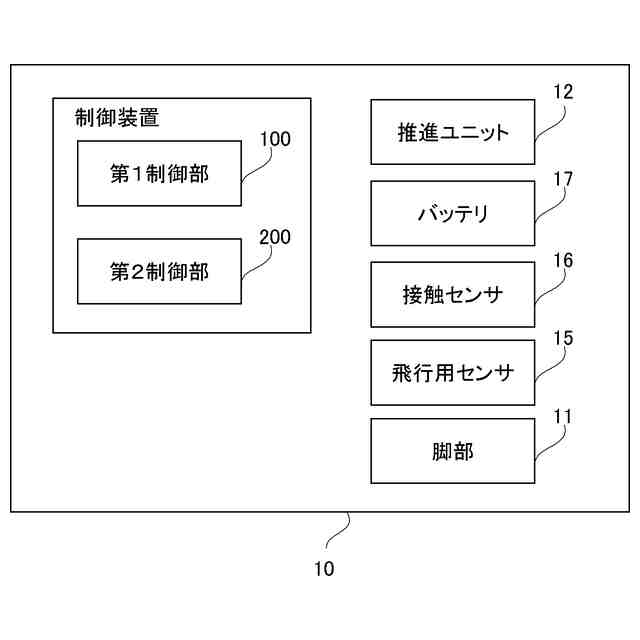
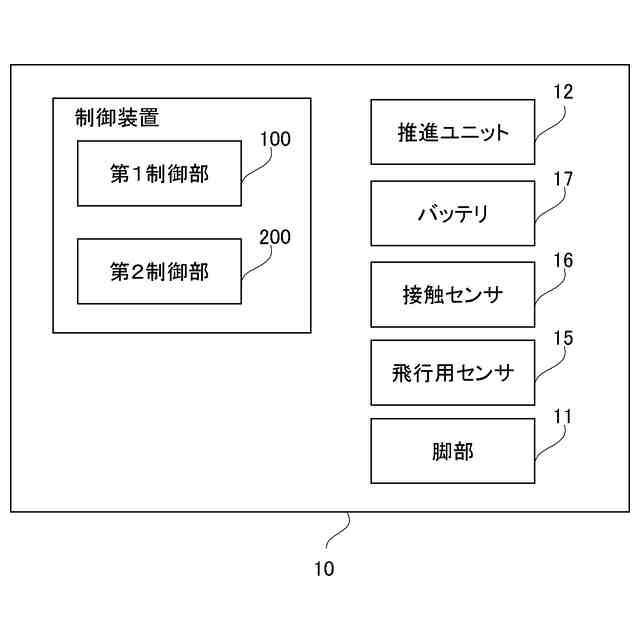
第1実施形態に係る移動ロボットの概略構成を示す図である。
第1実施形態に係る移動ロボットにおいて形成される機能部をイメージ化した機能ブロック図である。
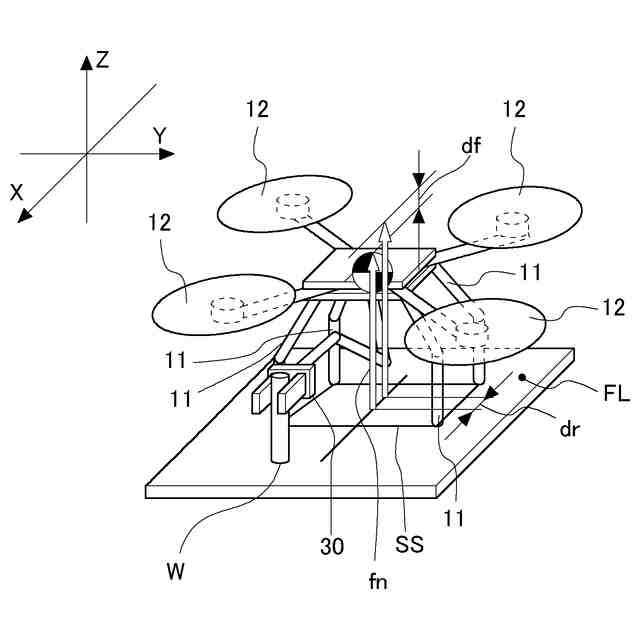
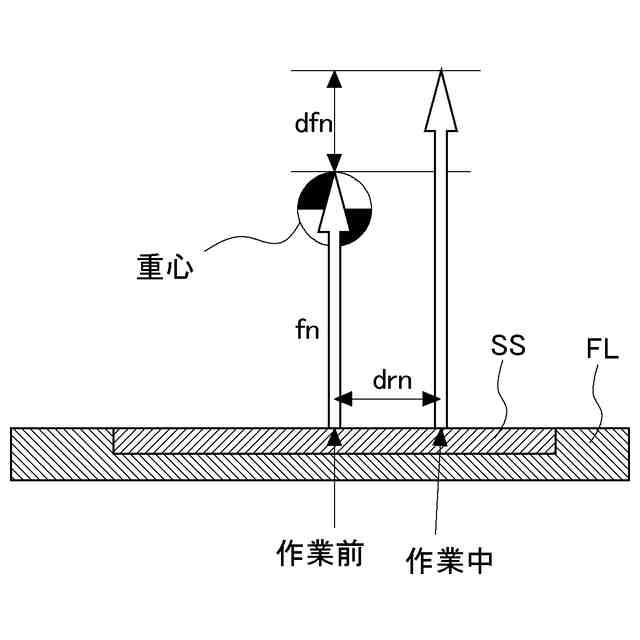
第1実施形態に係る作業動作を行っているときの、本体部の安定性の変化を説明するための図である。
第1実施形態に係るY軸方向から見た垂直抗力(接触面における垂直抗力の総和)の位置及び大きさの変化を模式的に示した図である。
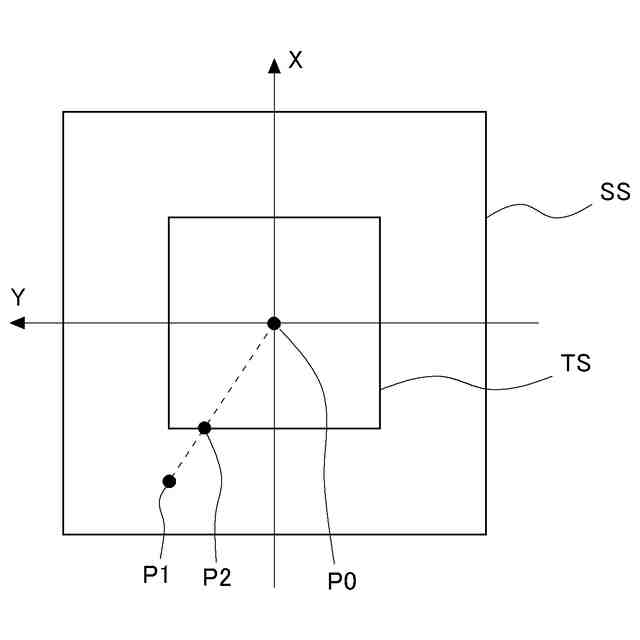
第1実施形態に係る支持領域及び目標領域を模式的に示した図である。
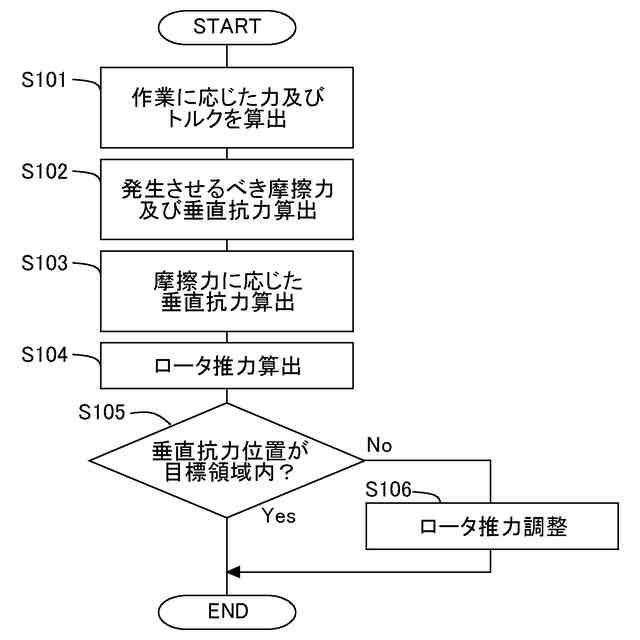
第1実施形態に係る第2制御部が実行するロータ推力を算出する処理の一例を示したフローチャートである。
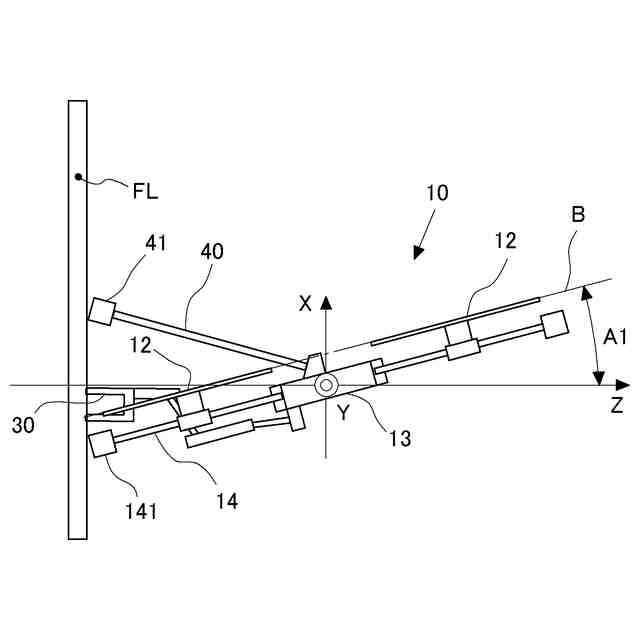
第2実施形態に係る移動ロボットの概略構成を示す図である。
第3実施形態に係る移動ロボットの概略構成を示す図である。
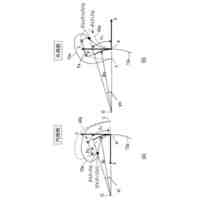
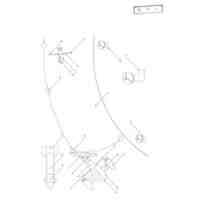
第3実施形態に係る移動ロボットをY軸方向から見たときの図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
THK株式会社
ロボット
1か月前
THK株式会社
曲線ガイド
7日前
THK株式会社
Ni基合金製積層造形物
22日前
個人
人工台風
1日前
個人
ドローン
4か月前
個人
着火ドローン
1か月前
個人
救難消防飛行艇
2か月前
個人
ドローンシステム
6か月前
東レ株式会社
中空回転翼
1か月前
個人
陸海空用の乗り物
3か月前
株式会社三圓
浮上装置
10か月前
個人
連続回転可能な飛行機翼
2か月前
個人
垂直離着陸機用エンジン改
5か月前
東レ株式会社
プロペラブレード
1か月前
東レ株式会社
プロペラブレード
1か月前
東レ株式会社
プロペラブレード
1か月前
個人
ドローンの計測操作方法3
10か月前
個人
空飛ぶクルマ
27日前
個人
ドローンの計測操作方法2
10か月前
キヤノン電子株式会社
磁気トルカ
11か月前
個人
空中移動システム
7か月前
個人
ドローン消音装置
8か月前
個人
ドローンを自動離着陸する方法
6か月前
個人
エアライナー全自動パラシュート
4か月前
トヨタ自動車株式会社
ドローン
4か月前
株式会社ACSL
システム
4か月前
株式会社小糸製作所
飛行体ポート
2か月前
株式会社ACSL
システム
4か月前
個人
搬送方法および搬送システム
1か月前
個人
ヘリコプター駆動装置
1か月前
合同会社アドエア
パラシュート射出装置
4か月前
合同会社アドエア
飛行体の落下補助装置
7か月前
個人
垂直離着陸機用ガスタービンエンジン
6か月前
個人
飛行体
1か月前
個人
パラボラ型スペースデブリカタパルト
1か月前
全日本空輸株式会社
ドーリシステム
9か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ