TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086070
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023199877
出願日
2023-11-27
発明の名称
ロボット
出願人
THK株式会社
代理人
弁理士法人インテクト国際特許事務所
,
個人
主分類
B25J
5/00 20060101AFI20250530BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数の駆動対象部を有する場合であっても、ロボットの小型化や軽量化を図ることができ、駆動対象部の駆動に伴う事故の発生を抑制したロボットを提供する。
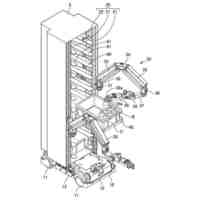
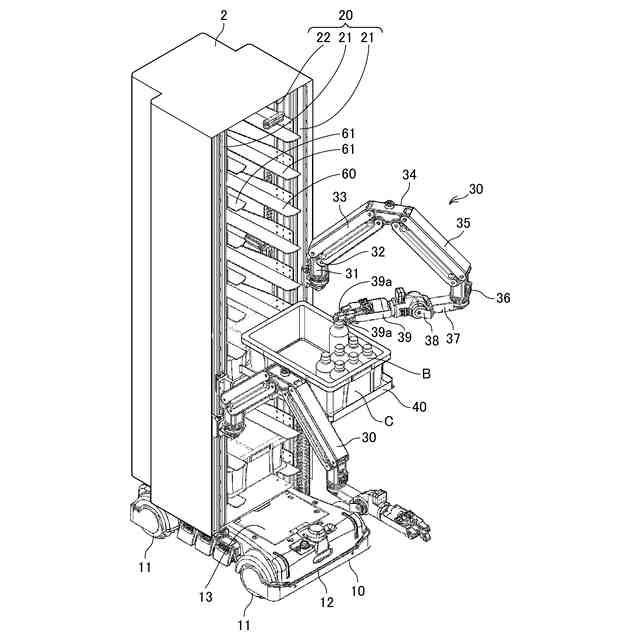
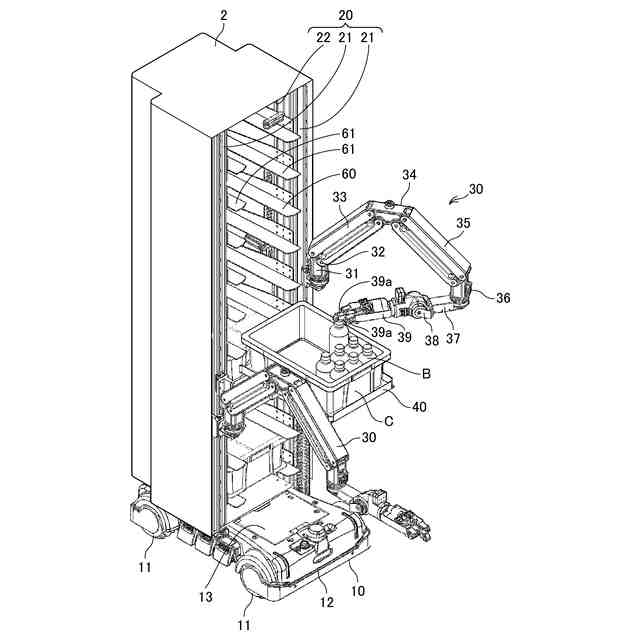
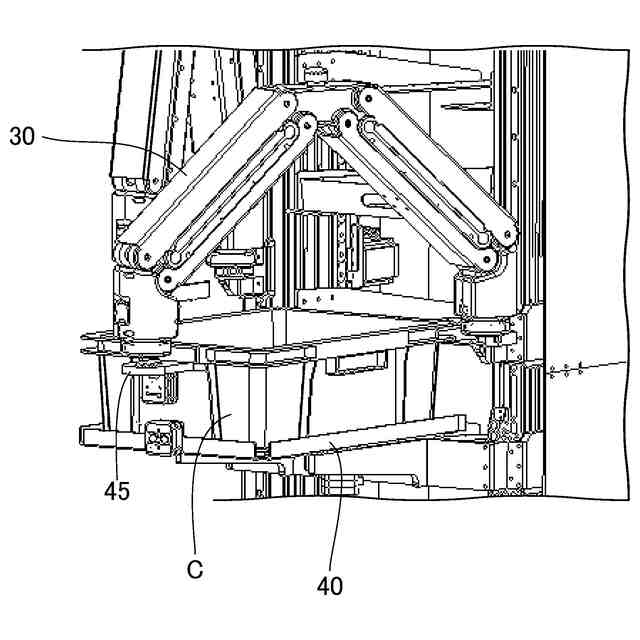
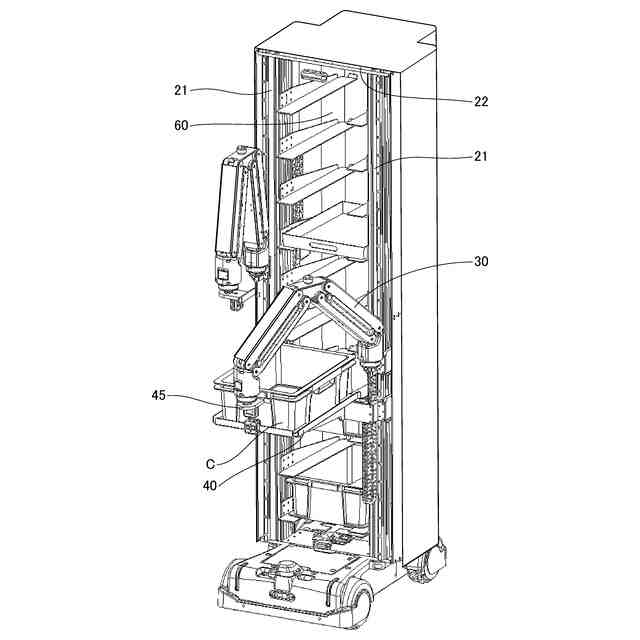
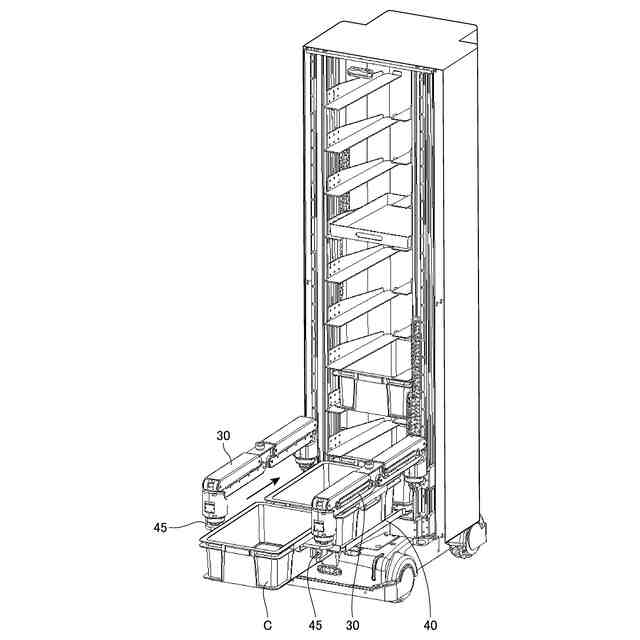
【解決手段】台部と、前記台部から鉛直方向に延設された柱部と、前記柱部の延設方向に沿って移動可能に組付けられる腕部と、前記柱部と略平行に鉛直方向に沿って張り渡された駆動案内部を備え、前記腕部は、前記駆動案内部に歯合する動力伝達部材と、前記動力伝達部材に駆動力を付与する昇降駆動部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
台部と、
前記台部から鉛直方向に延設された柱部と、
前記柱部の延設方向に沿って移動可能に組付けられる腕部と、
前記柱部と略平行に鉛直方向に沿って張り渡された駆動案内部を備え、
前記腕部は、前記駆動案内部に歯合する動力伝達部材と、前記動力伝達部材に駆動力を付与する昇降駆動部と、を備えることを特徴とするロボット。
続きを表示(約 500 文字)
【請求項2】
請求項1に記載のロボットにおいて、
前記駆動案内部の下端は、折返し部を介して、上方に向けて折り返されることを特徴とするロボット。
【請求項3】
請求項1又は2に記載のロボットにおいて、
前記駆動案内部は、前記鉛直方向に弾性力を付与する弾性力付与手段を備えることを特徴とするロボット。
【請求項4】
請求項1に記載のロボットにおいて、
前記駆動案内部は、歯付きベルトであることを特徴とするロボット。
【請求項5】
請求項1に記載のロボットにおいて、
前記柱部は、一対の柱部本体を備え、
前記柱部本体の先端を互いに連結する連結部を備えることを特徴とするロボット。
【請求項6】
請求項1に記載のロボットにおいて、
前記駆動案内部には、前記柱部の延設方向に沿って移動可能に組み付けられるテーブル部を備えることを特徴とするロボット。
【請求項7】
請求項1に記載のロボットにおいて、
前記台部は、走行機能を有する台車部であることを特徴とするロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近年、小売販売を行っているデパート、スーパーマーケット及びコンビニエンスストア並びに家電量販店などの店舗では、商品棚に種々の商品を陳列して販売を行っている。消費者は、この商品棚から希望する商品を手に取って商品を購入する。このように消費者が商品を購入することで商品棚に陳列された商品が減少するため、必要に応じて商品棚に商品を補充する必要がある。
【0003】
このような商品の補充作業は、店舗の従業員による手作業で行われていたが、近年では、従業員の関与なく商品が在庫されている倉庫や商品棚との間を自走して商品を商品棚に陳列する作業用の無人搬送車などが用いられるようになってきた。
【0004】
このような作業用の無人搬送車は、種々の形態が知られているが、例えば、特許文献1に記載されているように、無人搬送車(AGV)と、2つ以上の保管容器を保持するように構成およびサイズ決定される、前記AGV上にある載荷台と、前記AGVから延在するフレームと、前記フレームに設置されるロボットアームとを備えるシステムが知られている。
【0005】
このようなシステムによれば、ロボットアームがAGVを用いての商品の取出しや載置を容易にする高い自由度を有しており、従業員が関与することなく、作業効率を向上させることができる。
【先行技術文献】
【特許文献】
【0006】
特表2018-535163号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、商品棚近傍や倉庫は、通常商品棚の間隔が必要以上に広く設けられておらず、倉庫内には商品が多数置かれているため、作業用の十分なスペースがあるとは言えないため、AGVの小型化や軽量化が望まれていた。また、AGVの作業効率化のために、腕部を複数設けることも検討されている。
【0008】
ここで、従来の腕部の駆動には、アクチュエータを用いた昇降機構を適用しており、具体的には、動力を供給するアクチュエータ、アクチュエータの動力を伝達する伝達機構及び腕部の昇降運動を案内する案内部材の3部材を組み合わせる必要がある。このような昇降機構によると、腕部や作業台などの駆動対象部を複数設け、これらを独立して駆動させる場合には、それぞれの駆動対象部に対応した昇降機構が必要となり、AGVの小型化や軽量化を図ることが難しいという問題があった。
【0009】
また、サービスロボットとして作業を行うAGVは、駆動対象部の昇降に伴って駆動対象部が従業員などの手足等を腕部とロボット本体等との間に挟むなどの事故を避ける必要があるという問題もあった。
【0010】
本発明は、上記課題を解決するために成されたものであって、複数の駆動対象部を有する場合であっても、ロボットの小型化や軽量化を図ることができ、駆動対象部の駆動に伴う事故の発生を抑制したロボットを提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
THK株式会社
ロボット
7日前
THK株式会社
転動装置およびその製造方法
1か月前
日東精工株式会社
電動ドライバ
11日前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
16日前
株式会社ダイヘン
移動体
14日前
東京都公立大学法人
対象物把持装置
25日前
株式会社スター精機
吸着パッド
10日前
工機ホールディングス株式会社
作業機
2日前
学校法人五島育英会
アーム機構
16日前
工機ホールディングス株式会社
作業機
2日前
工機ホールディングス株式会社
作業機
2日前
株式会社スター精機
吸着パッド
10日前
庄内機械株式会社
釘打装置
29日前
株式会社アイエイアイ
グリッパー
1か月前
株式会社PILLAR
チューブ保持治具
21日前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
オークラ輸送機株式会社
ハンド装置
24日前
株式会社スター精機
産業用ロボット
8日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社マキタ
電動作業機
17日前
株式会社マキタ
電動作業機
17日前
株式会社リコー
多関節ロボット
15日前
芝浦機械株式会社
双腕ロボット
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車東日本株式会社
搬送治具
29日前
株式会社ジャノメ
ロボット
4日前
株式会社安川電機
ロボット
8日前
株式会社ダイヘン
ロボット制御システム
14日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
8日前
株式会社安川電機
ロボット
8日前
セイコーエプソン株式会社
ロボット
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ