TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025058513
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023168495
出願日
2023-09-28
発明の名称
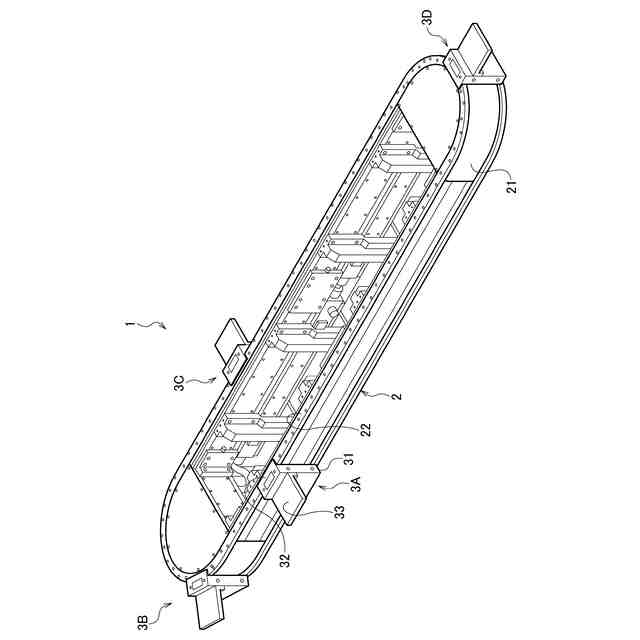
駆動装置、駆動方法、記憶媒体
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
H02P
25/064 20160101AFI20250402BHJP(電力の発電,変換,配電)
要約
【課題】位置指令の変更を伴わずに被駆動物の適切な減速を実現できる駆動装置等を提供する。
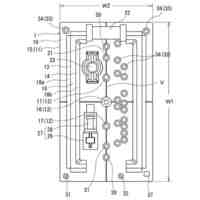
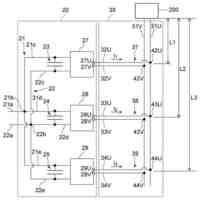
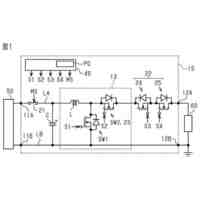
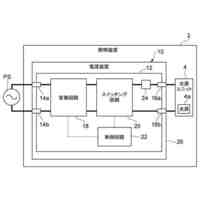
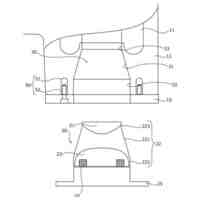
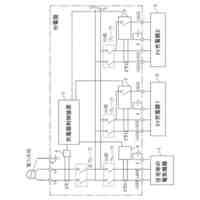
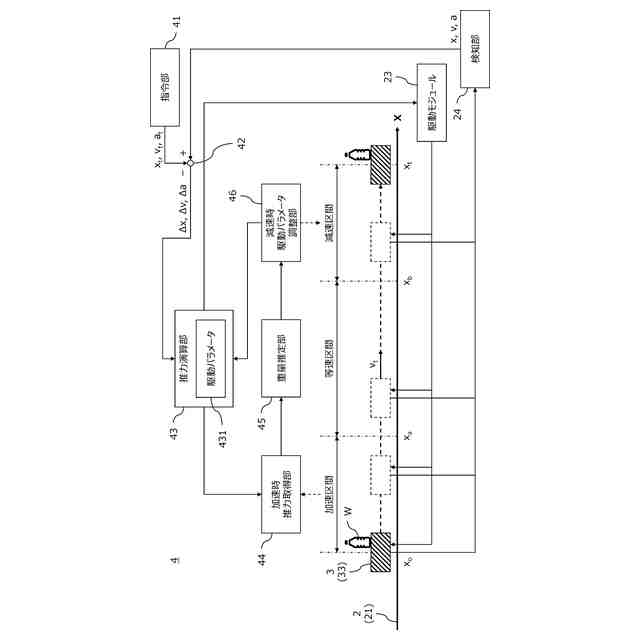
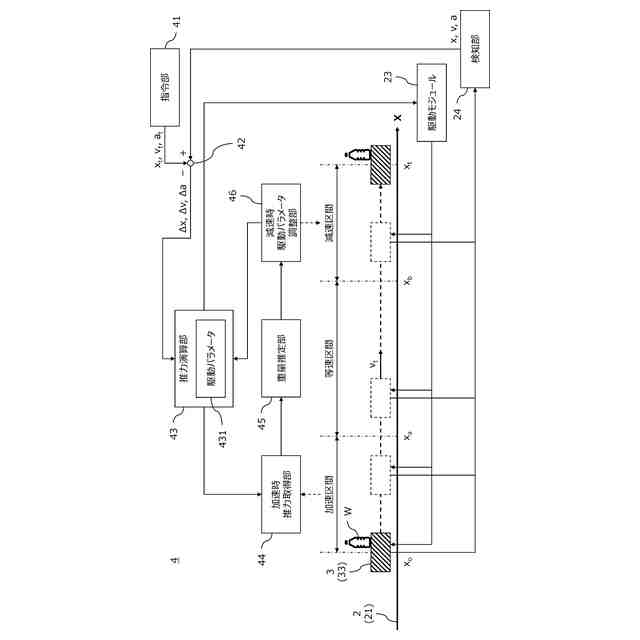
【解決手段】リニア搬送システムは、位置指令によって指定される目標位置x
t
に可動子3を駆動する駆動モジュール23と、可動子3の現在位置xと目標位置x
t
の偏差Δxを入力として、少なくとも一つの駆動パラメータ431に基づいて、駆動モジュール23が可動子3に加えるべき推力を演算する推力演算部43と、可動子3が駆動モジュール23によって加速される加速区間において、推力演算部43によって演算された推力を取得する加速時推力取得部44と、加速時推力取得部44によって取得された推力に応じて、可動子3が駆動モジュール23によって減速される減速区間における駆動パラメータ431を調整する減速時駆動パラメータ調整部46と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
位置指令によって指定される目標位置に被駆動物を駆動するアクチュエータと、
前記被駆動物の現在位置と前記目標位置の偏差を入力として、少なくとも一つの駆動パラメータに基づいて、前記アクチュエータが前記被駆動物に加えるべき推力を演算する推力演算部と、
前記被駆動物が前記アクチュエータによって加速される加速区間において、前記推力演算部によって演算された推力を取得する加速時推力取得部と、
前記加速時推力取得部によって取得された推力に応じて、前記被駆動物が前記アクチュエータによって減速される減速区間における前記駆動パラメータを調整する減速時駆動パラメータ調整部と、
を備える駆動装置。
続きを表示(約 1,400 文字)
【請求項2】
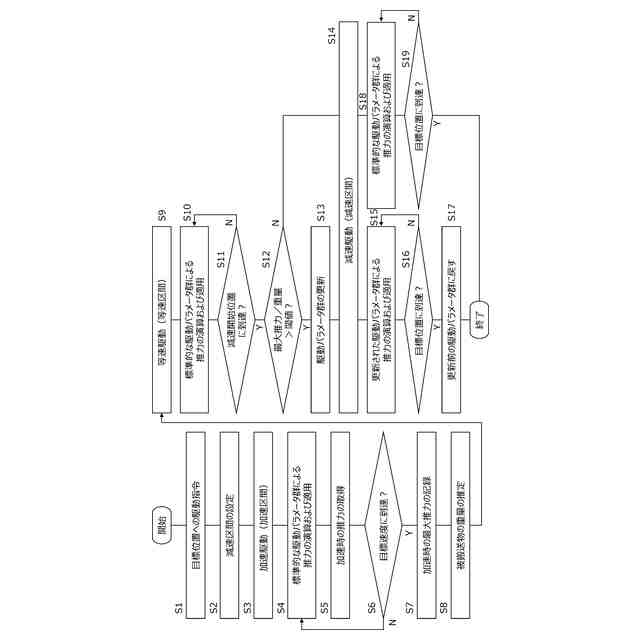
前記減速時駆動パラメータ調整部は、前記加速時推力取得部によって取得された推力が所定の大推力閾値を上回る場合、前記減速区間において前記アクチュエータが前記被駆動物に加える推力が大きくなるように前記駆動パラメータを調整する、請求項1に記載の駆動装置。
【請求項3】
前記減速時駆動パラメータ調整部は、前記加速時推力取得部によって取得された推力が前記大推力閾値を下回る場合、前記減速区間における前記駆動パラメータを前記加速区間から変更しない、請求項2に記載の駆動装置。
【請求項4】
前記加速時推力取得部によって取得された推力に基づいて、前記被駆動物の重量を推定する重量推定部を備え、
前記減速時駆動パラメータ調整部は、前記重量推定部によって推定された重量に応じて、前記減速区間における前記駆動パラメータを調整する、
請求項1から3のいずれかに記載の駆動装置。
【請求項5】
前記アクチュエータは、速度指令によって指定される目標速度で前記被駆動物を前記目標位置に駆動し、
前記加速区間は、前記被駆動物が前記アクチュエータによって前記目標速度まで加速される区間であり、
前記減速区間は、前記被駆動物が前記アクチュエータによって前記目標速度から減速される区間である、
請求項1から3のいずれかに記載の駆動装置。
【請求項6】
前記減速時駆動パラメータ調整部は、前記被駆動物が前記目標位置に到達した後に、前記駆動パラメータを調整前の値に戻す、請求項1から3のいずれかに記載の駆動装置。
【請求項7】
前記被駆動物は、重量が異なりうる被搬送物を搬送する搬送部である、請求項1から3のいずれかに記載の駆動装置。
【請求項8】
位置指令によって指定される目標位置に被駆動物を駆動するアクチュエータと、前記被駆動物の現在位置と前記目標位置の偏差を入力として、少なくとも一つの駆動パラメータに基づいて、前記アクチュエータが前記被駆動物に加えるべき推力を演算する推力演算部と、を備える駆動装置における駆動方法であって、
前記被駆動物が前記アクチュエータによって加速される加速区間において、前記推力演算部によって演算された推力を取得することと、
前記取得された推力に応じて、前記被駆動物が前記アクチュエータによって減速される減速区間における前記駆動パラメータを調整することと、
を実行する駆動方法。
【請求項9】
位置指令によって指定される目標位置に被駆動物を駆動するアクチュエータと、前記被駆動物の現在位置と前記目標位置の偏差を入力として、少なくとも一つの駆動パラメータに基づいて、前記アクチュエータが前記被駆動物に加えるべき推力を演算する推力演算部と、を備える駆動装置における駆動プログラムであって、
前記被駆動物が前記アクチュエータによって加速される加速区間において、前記推力演算部によって演算された推力を取得することと、
前記取得された推力に応じて、前記被駆動物が前記アクチュエータによって減速される減速区間における前記駆動パラメータを調整することと、
をコンピュータに実行させる駆動プログラムを記憶している記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、駆動装置等に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、コイル材を搬送するコイルカーをモータによって駆動する駆動装置が開示されている。この駆動装置では、コイルカーの加速時におけるモータの電流の検出を通じて、コイル材の積載重量が検出される。そして、コイルカーを所定の停止位置に停止させるための減速開始位置が、検出されたコイル材の積載重量に応じて調整される。
【先行技術文献】
【特許文献】
【0003】
特開平5-27842号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、積載重量の異なるコイルカー毎に、異なる減速開始位置を指定するために位置指令を更新する必要がある。このように、特許文献1では、コイルカーの位置制御の基本パラメータである位置指令自体が、積載重量に応じて書き換えられるため、制御が複雑化または長期化する恐れがある。
【0005】
本開示はこうした状況に鑑みてなされたものであり、位置指令の変更を伴わずに被駆動物の適切な減速を実現できる駆動装置等を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示のある態様の駆動装置は、位置指令によって指定される目標位置に被駆動物を駆動するアクチュエータと、被駆動物の現在位置と目標位置の偏差を入力として、少なくとも一つの駆動パラメータに基づいて、アクチュエータが被駆動物に加えるべき推力を演算する推力演算部と、被駆動物がアクチュエータによって加速される加速区間において、推力演算部によって演算された推力を取得する加速時推力取得部と、加速時推力取得部によって取得された推力に応じて、被駆動物がアクチュエータによって減速される減速区間における駆動パラメータを調整する減速時駆動パラメータ調整部と、を備える。
【0007】
本態様では、加速区間において演算された推力に応じて、減速区間における駆動パラメータが調整されるが、目標位置または位置指令は変更されない。このように、本態様によれば、位置指令の変更を伴わずに被駆動物の適切な減速を実現できる。
【0008】
本開示の別の態様は、駆動方法である。この方法は、位置指令によって指定される目標位置に被駆動物を駆動するアクチュエータと、被駆動物の現在位置と目標位置の偏差を入力として、少なくとも一つの駆動パラメータに基づいて、アクチュエータが被駆動物に加えるべき推力を演算する推力演算部と、を備える駆動装置における駆動方法であって、被駆動物がアクチュエータによって加速される加速区間において、推力演算部によって演算された推力を取得することと、取得された推力に応じて、被駆動物がアクチュエータによって減速される減速区間における駆動パラメータを調整することと、を実行する。
【0009】
本開示の更に別の態様は、記憶媒体である。この記憶媒体は、位置指令によって指定される目標位置に被駆動物を駆動するアクチュエータと、被駆動物の現在位置と目標位置の偏差を入力として、少なくとも一つの駆動パラメータに基づいて、アクチュエータが被駆動物に加えるべき推力を演算する推力演算部と、を備える駆動装置における駆動プログラムであって、被駆動物がアクチュエータによって加速される加速区間において、推力演算部によって演算された推力を取得することと、取得された推力に応じて、被駆動物がアクチュエータによって減速される減速区間における駆動パラメータを調整することと、をコンピュータに実行させる駆動プログラムを記憶している。
【0010】
なお、以上の構成要素の任意の組合せや、これらの表現を方法、装置、システム、記録媒体、コンピュータプログラム等に変換したものも、本開示に包含される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ファスナー式コード束ね
4日前
個人
高電荷低電位電荷搬送体
3日前
株式会社豊田自動織機
回転電機
3日前
未来工業株式会社
ゲージ
3日前
個人
回転電気装置及び発電装置
5日前
株式会社豊田自動織機
回転電機のロータ
4日前
株式会社コスメック
自立発電装置
5日前
高周波熱錬株式会社
電源装置
4日前
コーセル株式会社
スイッチング電源装置
3日前
高周波熱錬株式会社
電源装置
4日前
ニデック株式会社
ステータ、モータ及びドローン
4日前
株式会社ミツバ
端子ユニット
3日前
本田技研工業株式会社
回転電機
3日前
株式会社ミツバ
モータ制御装置
3日前
株式会社ミツバ
モータ制御装置
3日前
株式会社ミツバ
モータ制御装置
3日前
豊田合成株式会社
太陽光発電給電装置
5日前
株式会社ミツバ
モータ制御装置
3日前
株式会社村田製作所
電源装置及びプログラム
5日前
株式会社アイシン
車両用駆動装置
4日前
株式会社力電
励磁突入電流の抑制回路システム
4日前
株式会社アイシン
バッテリケース
5日前
シンフォニアテクノロジー株式会社
電力変換装置
5日前
株式会社明電舎
電力変換装置
3日前
ダイキン工業株式会社
電気装置、空気調和機
3日前
株式会社デンソー
モータ
3日前
株式会社デンソー
回転電機
4日前
東芝ライテック株式会社
電源装置及び照明器具
5日前
矢崎総業株式会社
配索構造
6日前
矢崎総業株式会社
配索構造
6日前
矢崎総業株式会社
配索構造
6日前
SWCC株式会社
ブッシング
3日前
矢崎総業株式会社
配索構造
5日前
矢崎総業株式会社
配索構造
6日前
矢崎総業株式会社
配索構造
6日前
株式会社ノエックス
EV充電器制御装置及びEV充電器
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ