TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025055834
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165217
出願日
2023-09-27
発明の名称
ハイブリッド自動車
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
B60W
20/12 20160101AFI20250401BHJP(車両一般)
要約
【課題】モータ走行が特に必要な領域をより確実にモータ走行する。
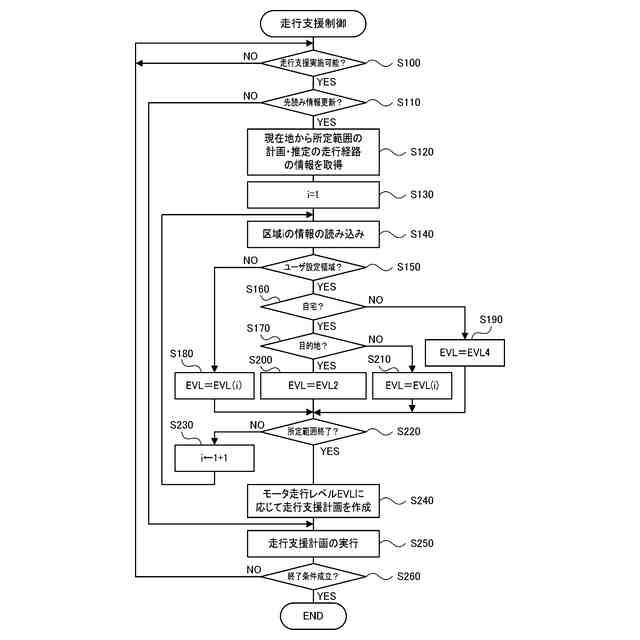
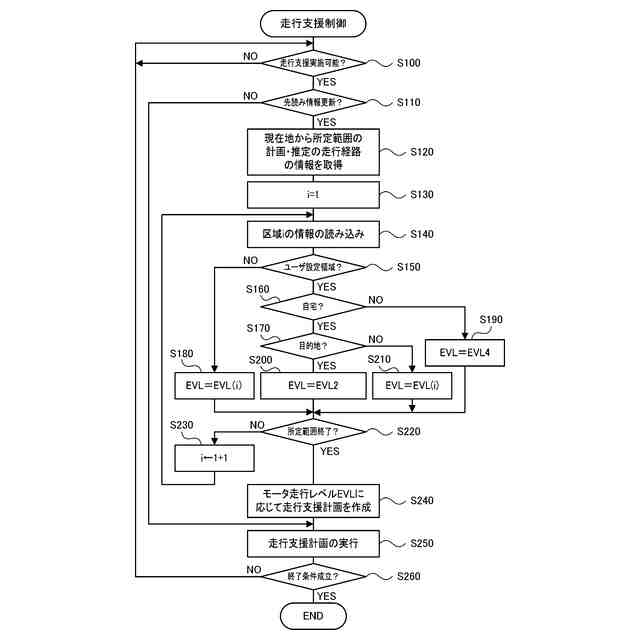
【解決手段】ハイブリッド自動車の制御装置は、地図情報と自車位置とに基づく計画または推定された走行経路の各走行区間の情報を用いて各走行区間に前記モータ走行モードまたは前記通常走行モードを割り付けた走行支援計画に基づいて走行する走行支援制御を実行する。また、制御装置は、各走行区間に設定された複数段階のモータ走行レベルに基づいて前記走行支援計画を作成する。
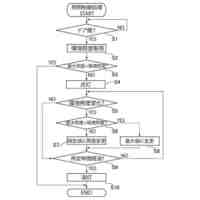
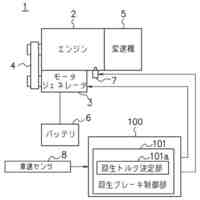
【選択図】図2
特許請求の範囲
【請求項1】
走行用の動力を出力可能なエンジンと、
走行用の動力を出力可能なモータと、
前記モータと電力のやりとりが可能な蓄電装置と、
前記エンジンの運転を停止した状態で前記モータからの動力により走行するモータ走行を行なうモータ走行モードと、必要に応じて前記エンジンからの動力と前記モータからの動力とにより走行する通常走行を行なう通常走行モードとを切り替えて前記エンジンおよび前記モータを制御する際に、地図情報と自車位置とに基づく計画または推定された走行経路の各走行区間の情報を用いて各走行区間に前記モータ走行モードまたは前記通常走行モードを割り付けた走行支援計画に基づいて走行する走行支援制御を実行する制御装置と、
を備えるハイブリッド自動車であって、
前記制御装置は、各走行区間に設定された複数段階のモータ走行レベルに基づいて前記走行支援計画を作成する、
ことを特徴とするハイブリッド自動車。
続きを表示(約 910 文字)
【請求項2】
請求項1記載のハイブリッド自動車であって、
前記制御装置は、前記モータ走行レベルが所定レベル以上の走行区間を走行する前に前記蓄電装置を充電する、
ハイブリッド自動車。
【請求項3】
請求項1記載のハイブリッド自動車であって、
前記制御装置は、前記走行経路にユーザによりモータ走行すべき区間として設定されたユーザ設定走行区間に対しては優先的に前記モータ走行モードを設定して前記走行支援計画を作成する、
ハイブリッド自動車。
【請求項4】
請求項1記載のハイブリッド自動車であって、
前記制御装置は、前記走行経路に公的機関によりモータ走行すべき区間として設定された機関設定走行区間に対しては優先的に前記モータ走行モードを設定して前記走行支援計画を作成する、
ハイブリッド自動車。
【請求項5】
請求項4に記載のハイブリッド自動車であって、
前記制御装置は、前記機関設定走行区間として公的機関により所定の強度以上でモータ走行すべき区間として設定されている区間に対しては前記ユーザ設定走行区間に比して優先的に前記モータ走行モードを設定して前記走行支援計画を作成する、
ハイブリッド自動車。
【請求項6】
請求項1記載のハイブリッド自動車であって、
前記制御装置は、ユーザにより自宅として設定された地点が目的地として計画または推定されているときには、自宅に至る走行区間を優先的に前記モータ走行モードを設定して前記走行支援計画を作成し、自宅が目的地までの経由地点であるときには自宅を含む走行区間のモータ走行レベルに基づいて前記走行支援計画を作成する、
ハイブリッド自動車。
【請求項7】
請求項1記載のハイブリッド自動車であって、
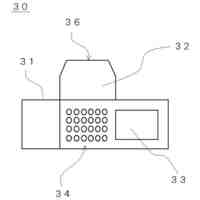
前記地図情報と共に自車位置と前記走行経路の少なくとも一部を表示する表示装置を備え、
前記制御装置は、前記モータ走行レベルに基づく表示方法により前記表示装置に表示されるよう制御する、
ハイブリッド自動車。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ハイブリッド自動車に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、この種のハイブリッド自動車としては、電動機単独走行の電動機モードと、エンジン単独走行のエンジンモードと、両者併用の併用モードとの各モードをモード切換車速に応じて切り換えるものが提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、モード切換車速を市街地や、郊外、高速道路、トンネル等の各種環境毎に切り替えることにより、環境に適合した走行を可能としている。
【先行技術文献】
【特許文献】
【0003】
特開平06-187595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、排ガスの排出が禁止されるゼロエミッションゾーン(Zero Emission Zone:ZEZ)のようにモータ走行のみが許可されるモータ走行限定領域や排ガスの排出を極力抑制するローエミッションゾーン(Low Emission Zone:LEZ)のようなモータ走行推奨領域などが設定さており、各領域に応じた走行が望まれる。また、騒音を抑制するためにユーザが自宅の周辺などにモータ走行領域を設定したい場合がある。これらの各領域を一律にモータ走行するものとすれば、モータ走行限定領域に至る前にバッテリの残容量が低下し、モータ走行限定領域をモータ走行することができない場合が生じる。
【0005】
本開示のハイブリッド自動車は、モータ走行が特に必要な領域をより確実にモータ走行することができるようにすることを主目的とする。
【課題を解決するための手段】
【0006】
本開示のハイブリッド自動車は、上述の主目的を達成するために以下の手段を採った。
【0007】
走行用の動力を出力可能なエンジンと、
走行用の動力を出力可能なモータと、
前記モータと電力のやりとりが可能な蓄電装置と、
前記エンジンの運転を停止した状態で前記モータからの動力により走行するモータ走行を行なうモータ走行モードと、必要に応じて前記エンジンからの動力と前記モータからの動力とにより走行する通常走行を行なう通常走行モードとを切り替えて前記エンジンおよび前記モータを制御する際に、地図情報と自車位置とに基づく計画または推定された走行経路の各走行区間の情報を用いて各走行区間に前記モータ走行モードまたは前記通常走行モードを割り付けた走行支援計画に基づいて走行する走行支援制御を実行する制御装置と、
を備えるハイブリッド自動車であって、
前記制御装置は、各走行区間に設定された複数段階のモータ走行レベルに基づいて前記走行支援計画を作成する、
ことを特徴とする。
【0008】
本開示のハイブリッド自動車では、走行用の動力を出力可能なエンジンと、走行用の動力を出力可能なモータと、モータと電力のやりとりが可能な蓄電装置と、エンジンの運転を停止した状態でモータからの動力により走行するモータ走行を行なうモータ走行モードと、必要に応じてエンジンからの動力とモータからの動力とにより走行する通常走行を行なう通常走行モードとを切り替えてエンジンおよびモータを制御する制御装置を備える。制御装置は、地図情報と自車位置とに基づく計画または推定された走行経路の各走行区間の情報を用いて各走行区間にモータ走行モードまたは通常走行モードを割り付けた走行支援計画に基づいて走行する走行支援制御を実行する。制御装置は、計画または推定される走行経路における各走行区間に設定された複数段階のモータ走行レベルに基づいて前記走行支援計画を作成する。即ち、計画または推定された走行区間のうちモータ走行レベルが高い走行区間から順にモータ走行モードを割り当てるのである。これにより、モータ走行レベルの高い走行区間により確実にモータ走行モードを割り当ててより確実にモータ走行を可能とすることができる。ここで、「計画された走行経路」は現在地から目的地までの経路案内により設定された走行経路を意味しており、「推定された走行経路」は現在地から走行が推定される走行経路を意味している。
【0009】
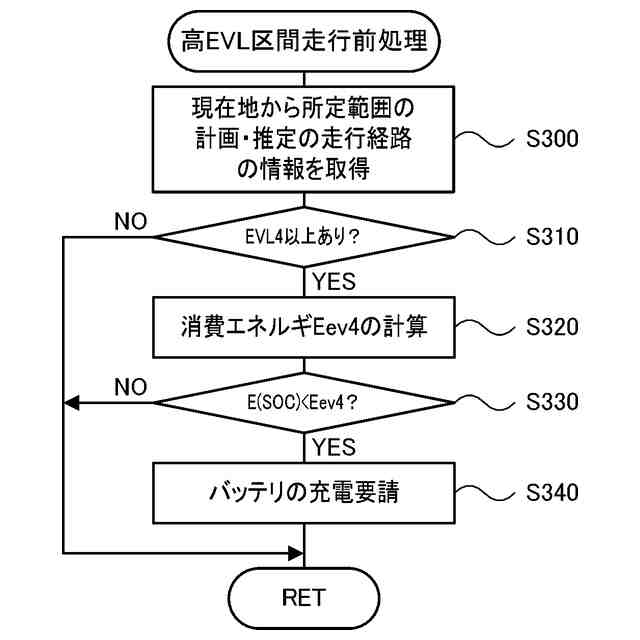
本開示のハイブリッド自動車において、前記制御装置は、前記モータ走行レベルが所定レベル以上の走行区間を走行する前に前記蓄電装置を充電するものとしてもよい。こうすれば、モータ走行レベルが所定レベル以上の走行区間をより確実にモータ走行により走行することができる。なお、モータ走行レベルが所定レベル以上の走行区間の所定距離前に蓄電装置の充電を行なわなくても対象の走行区間をモータ走行により走行が可能なときには、蓄電装置の充電を行なわないものとしてもよい。こうすれば無駄な蓄電装置の充電を回避することができる。
【0010】
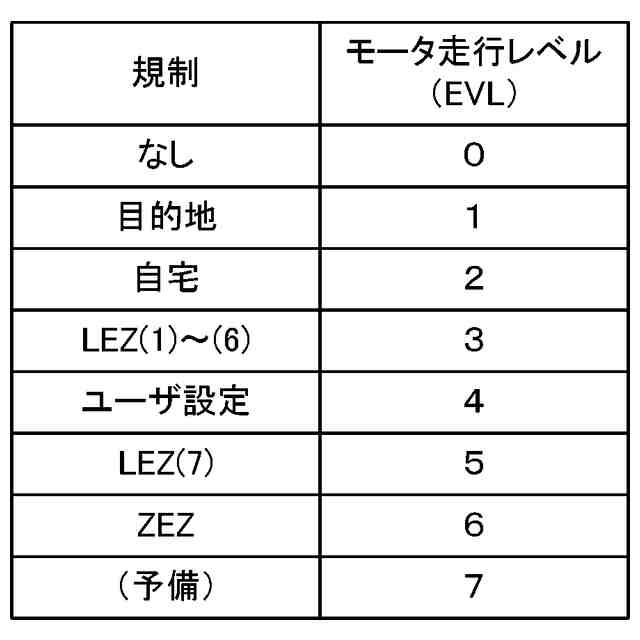
本開示のハイブリッド自動車において、前記制御装置は、前記走行経路にユーザによりモータ走行すべき区間として設定されたユーザ設定走行区間に対しては優先的に前記モータ走行モードを設定して前記走行支援計画を作成するものとしてもよい。こうすればユーザの意思をより確実に反映することができる。この場合、前記制御装置は、前記走行経路に公的機関によりモータ走行すべき区間として設定された機関設定走行区間に対しては優先的に前記モータ走行モードを設定して前記走行支援計画を作成するものとしてもよい。更にこの場合、前記制御装置は、前記機関設定走行区間として公的機関により所定の強度以上でモータ走行すべき区間として設定されている区間に対しては前記ユーザ設定走行区間に比して優先的に前記モータ走行モードを設定して前記走行支援計画を作成するものとしてもよい。例えば、モータ走行レベルを用いて考えると、公的機関による5段階の強度のうちモータ走行の程度が低い1~4段までのモータ走行レベルを3とし、最も強度の高い5段のモータ走行レベルを5とし、ユーザ設定走行区間のモータ走行レベルを4とした場合などが相当する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
2日前
個人
小型EVシステム
4日前
日本精機株式会社
ケース
10日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
17日前
個人
アンチロール制御装置
24日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
17日前
日本精機株式会社
表示装置
1か月前
株式会社松華
懸架装置
1か月前
個人
ブレーキシステム
15日前
個人
ステージカー
1か月前
個人
自走式立体型洗車場
1か月前
横浜ゴム株式会社
タイヤ
14日前
個人
自動車ドア開度規制ベルト
3日前
マツダ株式会社
車両
1か月前
井関農機株式会社
作業車両
22日前
株式会社ユーシン
照明装置
17日前
日本精機株式会社
車両用照明装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
1か月前
帝国繊維株式会社
作業車両
9日前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
2か月前
個人
農業機械への架線給電システム
28日前
コイト電工株式会社
座席装置
1か月前
スズキ株式会社
車両制御装置
11日前
エムケー精工株式会社
車両処理装置
16日前
ダイハツ工業株式会社
車両構造
1か月前
ダイハツ工業株式会社
車両構造
3日前
ダイハツ工業株式会社
車両構造
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ