TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025054160
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2024044635,2023573147
出願日
2024-03-21,2023-09-25
発明の名称
搬送車の走行制御システム及び搬送車の走行制御方法
出願人
株式会社LexxPluss
代理人
One ip弁理士法人
主分類
G05D
1/65 20240101AFI20250328BHJP(制御;調整)
要約
【課題】停止精度を高めることと、走行効率を高めることの両立を図ることができる搬送車の走行制御システム及び搬送車の走行制御方法を提供する。
【解決手段】本開示による搬送車の制御システムは、軌道ラインに沿って移動可能な搬送車の走行制御システムであって、前記軌道ラインの延在方向における搬送車の現在位置と目的位置との差分の距離に基づいて、前記搬送車の走行速度を制御する走行制御処理、を実行する制御部を備え、前記走行制御処理は、前記距離が特定の第1数値以上である場合には一定の第1速度となるように制御し、前記距離が特定の第1数値未満で、特定の第2数値以上である場合には、前記距離と前記速度の関係が予め定めた2次関数の式を満たす第2速度となるように、前記距離の減少に応じて徐々に減速制御し、前記距離が第2の特定値未満である場合には、第1速度よりも小さい一定の第3速度となるように前記搬送車の速度を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
軌道ラインに沿って移動可能な搬送車の走行制御システムであって、
前記軌道ラインの延在方向における搬送車の現在位置と目的位置との差分の距離に基づいて、前記搬送車の走行速度を制御する走行制御処理、を実行する制御部を備え、
前記走行制御処理は、前記距離が特定の第1数値以上である場合には一定の第1速度となるように制御し、
前記距離が特定の第1数値未満で、特定の第2数値以上である場合には、前記距離と前記速度の関係が予め定めた2次関数の式を満たす第2速度となるように、前記距離の減少に応じて徐々に減速制御し、
前記距離が第2の特定値未満である場合には、第1速度よりも小さい一定の第3速度となるように前記搬送車の速度を制御する、走行制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記搬送車が前記目的位置に向けて前進する際に、前記距離に基づいて前記走行制御処理を実行するとともに、
前記搬送車が目的位置を通り過ぎた場合には、前記距離に基づいて後退方向に前記走行制御処理を実行する、請求項1に記載の走行制御システム。
【請求項3】
前記搬送車に設けたセンサからの情報に基づいて、前記軌道ラインの延在方向に対する前記搬送車の角度を推定する角度推定処理と、
前記搬送車に設けたセンサからの情報に基づいて、前記軌道ラインの延在方向に垂直な方向における前記軌道ラインと前記搬送車との相対位置を推定する相対位置推定処理と、
前記搬送車の角度及び前記相対位置に基づいて、前記搬送車の向きを制御する、請求項1又は2に記載の走行制御システム。
【請求項4】
前記制御部は、式[A]を満たように、前記走行制御処理を実行する、請求項1又は2に記載の走行制御システム。
vx = sign(x) * max(Vmin, min(k * x^2, Vmax)) [A]
min(a,b) : a, b の内小さい値を採用する
max(a,b) : a, b の内大きい値を採用する
sign(x) : xの符号を指す。ロボットが目的位置(ゴール)を超過している場合 sign(x) = -1, 目的位置の手前に位置する場合 sign(x) = +1
Vmin : 速度の最小値
Vmax : 速度の最大値
k : 定数
【請求項5】
前記制御部は、距離推定処理において、位置推定部から取得する前記現在位置と、記憶部から取得する前記目的位置との差分に基づいて、前記距離を算出する、請求項1又は2に記載の走行制御システム。
【請求項6】
前記制御部は、前記搬送車の速度センサで取得する速度情報に基づいて、前記走行制御処理を実行する、請求項1又は2に記載の走行制御システム。
【請求項7】
前記制御部は、予め定められる一定期間ごとに、前記距離の推定処理を実行する、請求項1または2に記載の走行制御システム。
【請求項8】
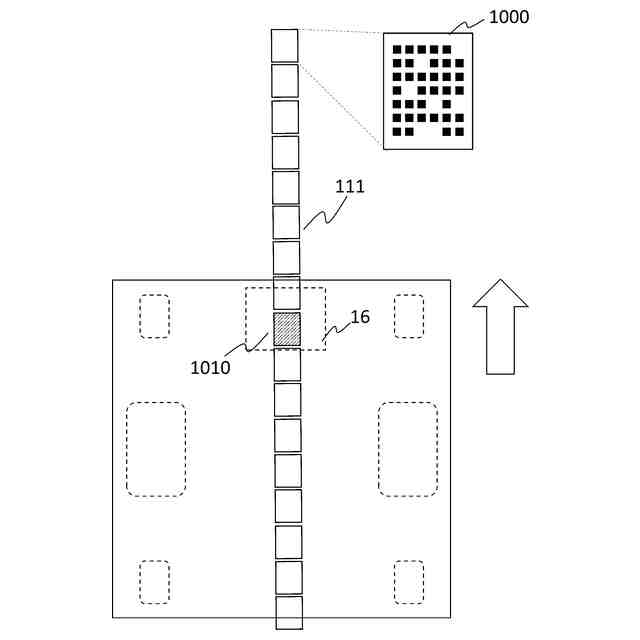
路面に設置された2次元コードをスキャンすることにより、前記現在位置を取得する、請求項1又は2に記載の走行制御システム。
【請求項9】
軌道ラインに沿って移動可能な搬送車の走行制御方法であって、
前記搬送車の制御部が、
前記軌道ラインの延在方向における搬送車の現在位置と目的位置との差分の距離に基づいて、前記搬送車の走行速度を制御する走行制御処理と、を実行し、
前記走行制御処理は、前記距離が特定の第1数値以上である場合には一定の第1速度となるように制御し、
前記距離が特定の第1数値未満で、特定の第2数値以上である場合には、前記距離と前記速度の関係が予め定めた2次関数の式を満たす第2速度となるように、前記距離の減少に応じて徐々に減速制御し、
前記距離が第2の特定値未満である場合には、第1速度よりも小さい一定の第3速度となるように前記搬送車の速度を制御する、走行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送車の走行制御システム及び搬送車の走行制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、工場や倉庫内などの施設内における荷物の搬送に自律走行可能な無人搬送車を活用することが実用化されている。例えば、施設内に敷設された所定のガイドラインに沿って走行したり、ガイドラインなしで自律走行したり、それらを組み合わせて走行する搬送車が知られている。特許文献1には、移動経路の区間ごとに移動速度を設定することで、目的地まで搬送車を走行させる技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-053837号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術では、搬送車がラインに沿って走行するに際して、1速から4速及びクリープ速度の何れかの設定速度となるように走行することが開示されている。しかしながら、停止精度を高めることと、走行効率を高めることの両立という点では改善の余地がある。
【0005】
そこで、本開示は上記の少なくともいずれかの問題点に鑑みてなされたものであり、その目的は、停止精度を高めることと、走行効率を高めることの両立を図ることができる搬送車の走行制御システム及び搬送車の走行制御方法を提供することである。
【課題を解決するための手段】
【0006】
本開示によれば、軌道ラインに沿って移動可能な搬送車の走行制御システムであって、
前記軌道ラインの延在方向における搬送車の現在位置と目的位置との差分の距離に基づいて、前記搬送車の走行速度を制御する走行制御処理、を実行する制御部を備え、
前記走行制御処理は、前記距離が特定の第1数値以上である場合には一定の第1速度となるように制御し、
前記距離が特定の第1数値未満で、特定の第2数値以上である場合には、前記距離と前記速度の関係が予め定めた2次関数の式を満たす第2速度となるように、前記距離の減少に応じて徐々に減速制御し、
前記距離が第2の特定値未満である場合には、第1速度よりも小さい一定の第3速度となるように前記搬送車の速度を制御する走行制御システムが提供される。
【0007】
本開示によれば、軌道ラインに沿って移動可能な搬送車の走行制御方法であって、
前記搬送車の制御部が、
前記軌道ラインの延在方向における搬送車の現在位置と目的位置との差分の距離に基づいて、前記搬送車の走行速度を制御する走行制御処理、を実行し、
前記走行制御処理は、前記距離が特定の第1数値以上である場合には一定の第1速度となるように制御し、
前記距離が特定の第1数値未満で、特定の第2数値以上である場合には、前記距離と前記速度の関係が予め定めた2次関数の式を満たす第2速度となるように、前記距離の減少に応じて徐々に減速制御し、
前記距離が第2の特定値未満である場合には、第1速度よりも小さい一定の第3速度となるように前記搬送車の速度を制御する、走行制御方法が提供される。
【発明の効果】
【0008】
本開示によれば、停止精度を高めることと、走行効率を高めることの両立を図ることができる搬送車の走行制御システム及び搬送車の走行制御方法を提供することができる。
【図面の簡単な説明】
【0009】
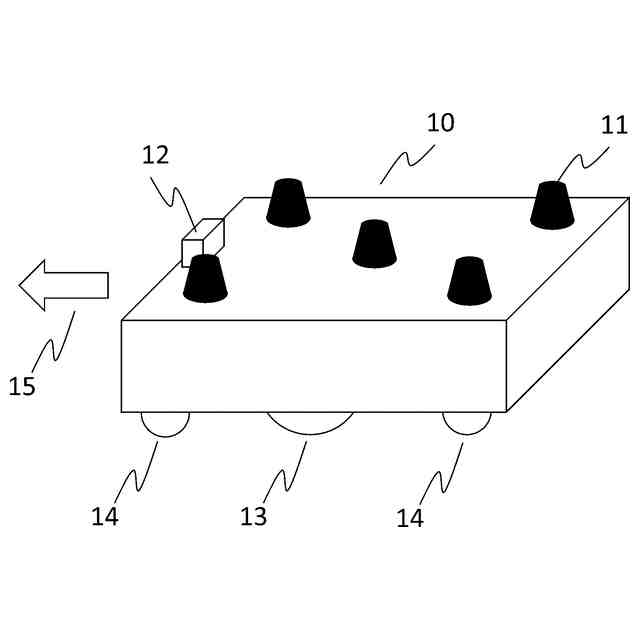
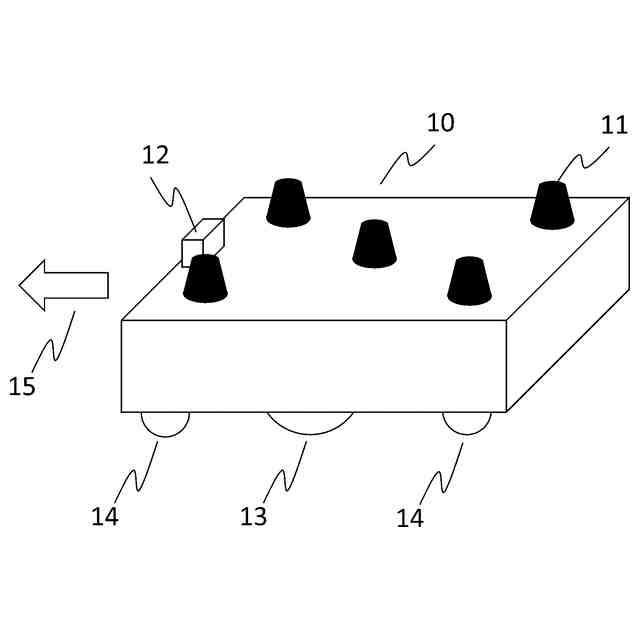
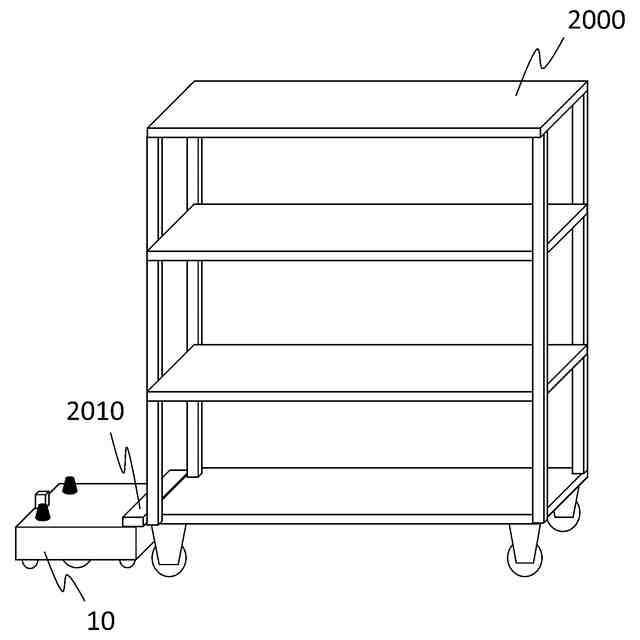
本実施形態に係る搬送車のハードウェア構成例を示す斜視図である。
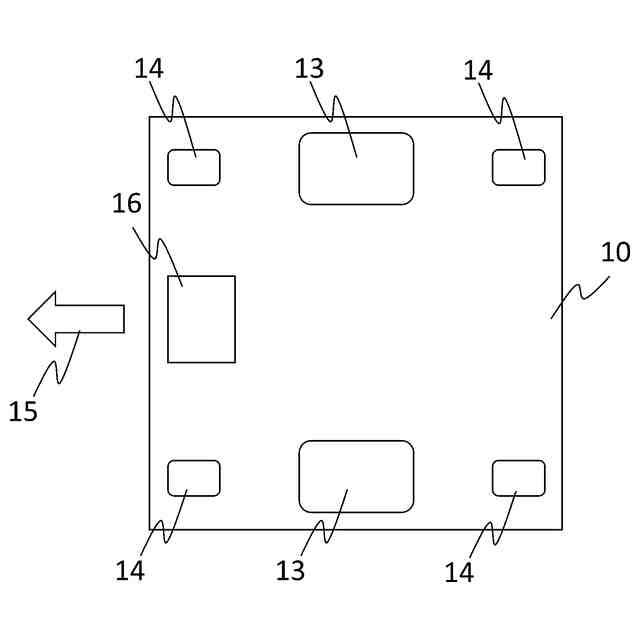
本実施形態に係る搬送車のハードウェア構成例を示す下面図である。
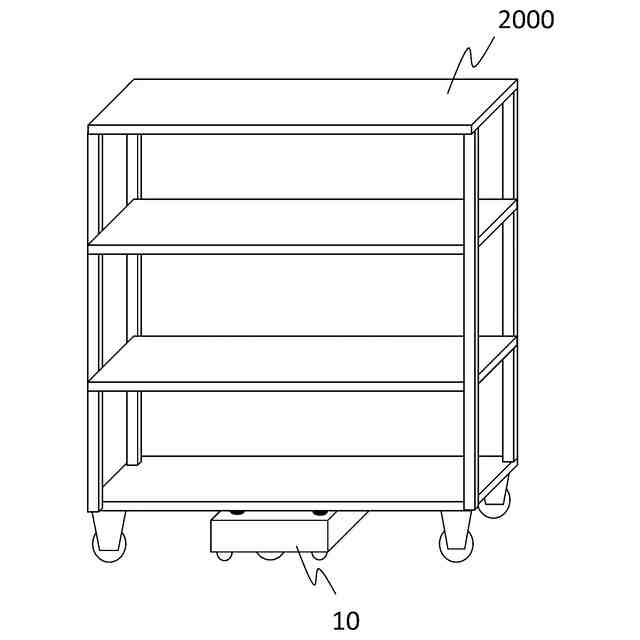
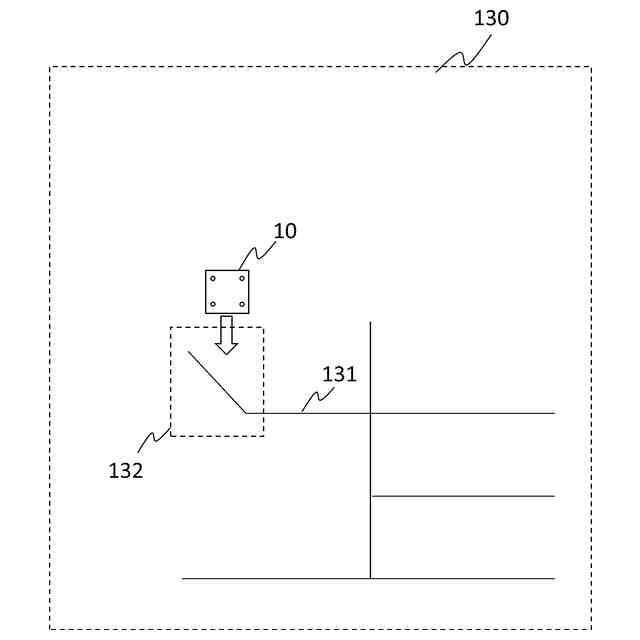
本実施形態に係る搬送車と牽引台車が結合された際のハードウェア構成の一例を示す図である。
本実施形態に係る搬送車と牽引台車が結合された際のハードウェア構成の他の一例を示す図である。
本実施形態に係る動作エリアの構成例を示す図である。
誘導ライン検出部により誘導ラインを構成する二次元コードを検知した際の誘導ラインと搬送車の位置関係を示す図である。
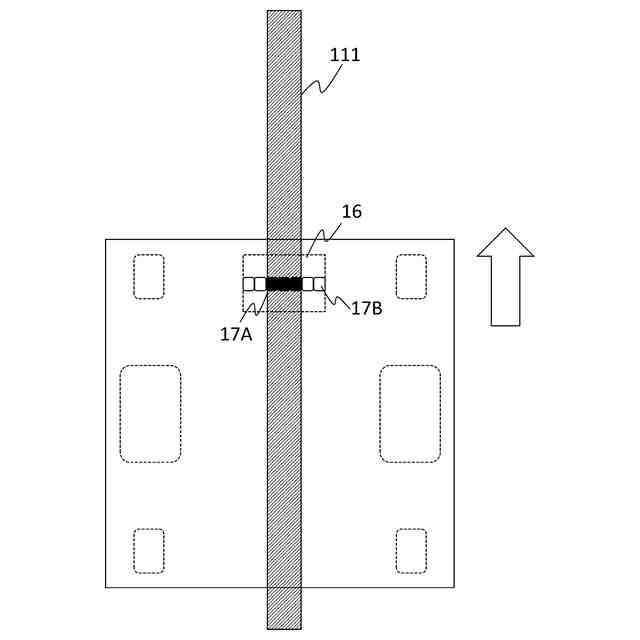
誘導ライン検出部により誘導ラインを構成する磁気テープを検知した際の誘導ラインと搬送車の位置関係を示す下面図である。
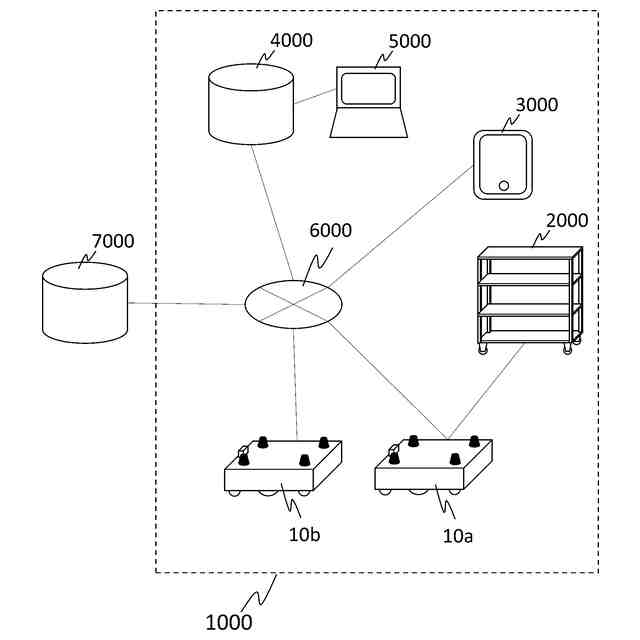
本実施形態に係る搬送システムの全体構成図の一例を示す図である。
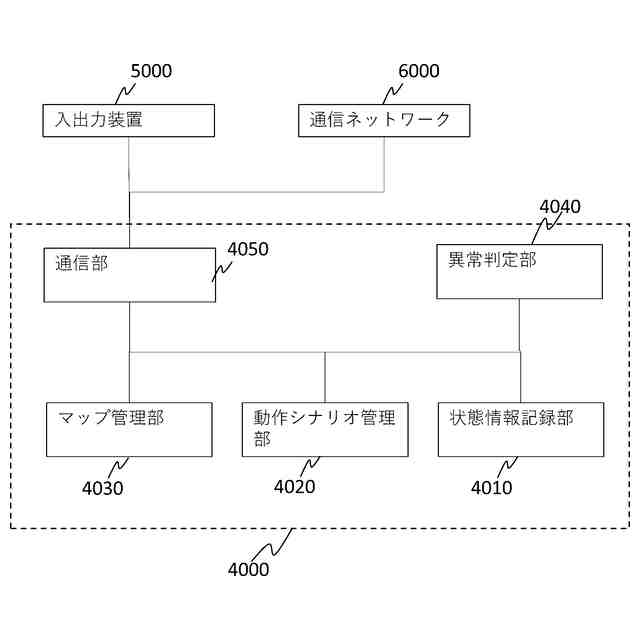
本実施形態における統括制御装置の構成図である。
本実施形態に係る搬送車の機能構成図を示す図である。
本実施形態における搬送車の移動速度の一例を、位置(移動距離)を横軸として示す図である。
本実施形態における搬送車の移動速度の一例を、位置(移動距離)を横軸として示す図である。
本実施形態における制御システムの制御フローを示す図である。
【発明を実施するための形態】
【0010】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
今日
和研工業株式会社
多連レバー機構
13日前
株式会社クボタ
作業車
3日前
スター精密株式会社
工作機械
29日前
ローム株式会社
半導体集積回路
8日前
株式会社ダイフク
搬送車
3日前
エイブリック株式会社
ボルテージレギュレータ
今日
株式会社シンテックホズミ
搬送ロボット
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1日前
トヨタ自動車株式会社
工作機械の制御装置
2日前
株式会社ダイフク
物品搬送設備
1日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
愛知機械テクノシステム株式会社
無人搬送車
22日前
アズビル株式会社
制御システムおよび制御方法
23日前
アズビル株式会社
制御システムおよび制御方法
14日前
アズビル株式会社
制御システムおよび制御方法
14日前
トヨタ自動車株式会社
自律走行装置
1か月前
日本精工株式会社
制御装置および制御方法
20日前
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
チームラボ株式会社
走行システム及び走行路
27日前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
22日前
村田機械株式会社
稼働監視システム及び稼働監視方法
23日前
ローム株式会社
半導体装置
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
20日前
ミツミ電機株式会社
多方向入力装置
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































