TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025049959
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158499
出願日
2023-09-22
発明の名称
物品処理計画生成装置、物品処理計画生成システム、および物品処理計画生成プログラム
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B65G
1/137 20060101AFI20250327BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】通常の棚と比較して上部の在庫容量を拡大することができる技術を提供する。
【解決手段】実施形態に係る物品処理計画生成装置は、搬送作業計画を受信する受信部と、搬送作業計画に基づいて最適動作計画を作成する生成部と、最適動作計画に基づいて、ピッキングステーションでピッキング手段がピッキング可能な棚の上部に上部トレイを収納する上部棚を備える棚を搬送する棚搬送ロボットに第1の動作指示を出力し、上部棚から上部トレイを取得または上部棚に上部トレイを格納する高層ケース搬送ロボットに第2の動作指示を出力する出力部と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
搬送作業計画を受信する受信部と、
前記搬送作業計画に基づいて動作計画を作成する生成部と、
前記動作計画に基づいて、ピッキングステーションでピッキング手段がピッキング可能な棚の上部に上部トレイを収納する上部棚を備える棚を搬送する棚搬送ロボットに第1の動作指示を出力し、前記上部棚から上部トレイを取得または前記上部棚に上部トレイを格納する高層ケース搬送ロボットに第2の動作指示を出力する出力部と、
を備える、物品処理計画生成装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第1の動作指示は、前記棚搬送ロボットに前記棚を倉庫内の待機位置に移動させる指示を含む、
請求項1に記載の物品処理計画生成装置。
【請求項3】
前記第2の動作指示は、前記高層ケース搬送ロボットに、前記待機位置で待機している前記上部棚から前記上部トレイを取得する指示をさらに含む、
請求項2に記載の物品処理計画生成装置。
【請求項4】
前記第1の動作指示は、前記棚搬送ロボットに前記棚を前記ピッキングステーションに隣接する棚待機領域に移動させる指示を含む、
請求項1に記載の物品処理計画生成装置。
【請求項5】
前記第2の動作指示は、前記高層ケース搬送ロボットに、前記棚待機領域で待機している前記上部棚から前記上部トレイを取得する指示をさらに含む、
請求項4に記載の物品処理計画生成装置。
【請求項6】
前記第1の動作指示は、前記高層ケース搬送ロボットが前記棚待機領域で前記上部棚から前記上部トレイを取得できない場合、前記棚搬送ロボットに前記棚の向きを調整する指示をさらに含む、
請求項4に記載の物品処理計画生成装置。
【請求項7】
前記第2の動作指示は、前記取得した上部トレイを前記ピッキングステーションが備えるコンベアの第1の所定の位置に配置する指示をさらに含む、
請求項3または5に記載の物品処理計画生成装置。
【請求項8】
前記第2の動作指示は、前記コンベアの第2の位置にあり、且つピッキング手段によりピッキングの終了した上部トレイを取得する指示をさらに含む、
請求項7に記載の物品処理計画生成装置。
【請求項9】
前記第1の動作指示は、前記高層ケース搬送ロボットに前記棚を前記ピッキングステーションで前記ピッキング手段が物品をピッキング可能な棚停止位置に移動させた後、前記棚を待機位置に移動させる指示を含む、
請求項1に記載の物品処理計画生成装置。
【請求項10】
前記第2の動作指示は、前記高層ケース搬送ロボットに前記待機位置に移動させ、前記上部棚に前記上部トレイを格納する指示を含む、
請求項9に記載の物品処理計画生成装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、物品処理計画生成装置、物品処理計画生成システム、および物品処理計画生成プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、物流の配送拠点等の倉庫では各種商品(以下、物品と称する)の取扱量が増加し、係員の作業負担を軽減すべく物品処理の自動化が進められている。例えば、上位装置からの指示に従い、様々な自動機器が連携し、物品が収容される機材が搬送される。自動機器としては、床面に配置される棚等の機材を搬送する棚搬送装置、および高所に配置されるパレット等の機材を取り込んで搬送するパレット搬送装置等が知られている。
【先行技術文献】
【特許文献】
【0003】
特許6957690号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常、棚搬送ロボットにより搬送されてくる棚から人手でピッキング作業を行う場合、棚の高さは、凡そ2.7m程度(3m以下)という制限がある。このため、倉庫の天井までの空間を十分に活用することができず、倉庫空間利用率が低下するという問題がある。
【0005】
この発明は、上記事情に着目してなされたもので、その目的とするところは、棚の上部(作業員の手の届かない位置)にさらに上部棚を配置し、通常の棚と比較して上部の在庫容量を拡大することができる技術を提供することにある。
【課題を解決するための手段】
【0006】
実施形態に係る物品処理計画生成装置は、搬送作業計画を受信する受信部と、前記搬送作業計画に基づいて最適動作計画を作成する生成部と、前記最適動作計画に基づいて、ピッキングステーションでピッキング手段がピッキング可能な棚の上部に上部トレイを収納する上部棚を備える棚を搬送する棚搬送ロボットに第1の動作指示を出力し、前記上部棚から上部トレイを取得または前記上部棚に上部トレイを格納する高層ケース搬送ロボットに第2の動作指示を出力する出力部と、を備えるものである。
【図面の簡単な説明】
【0007】
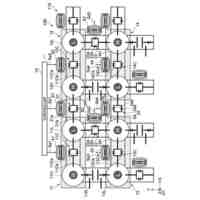
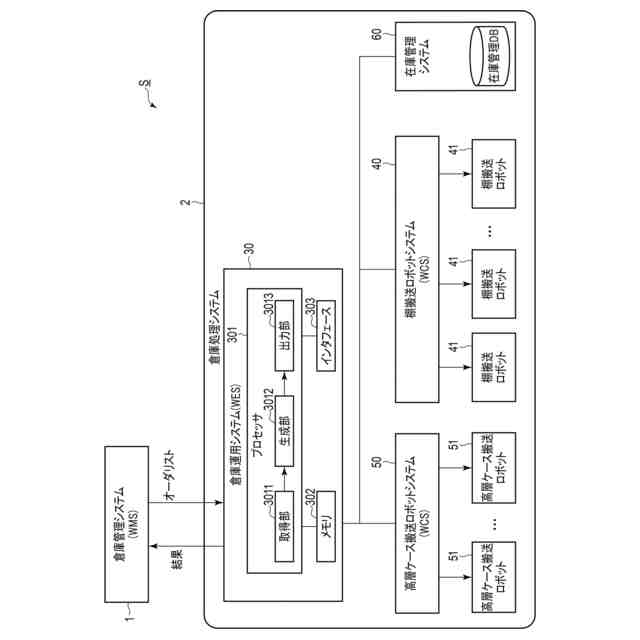
図1は、実施形態に係る物流システムの一例を示す概念図である。
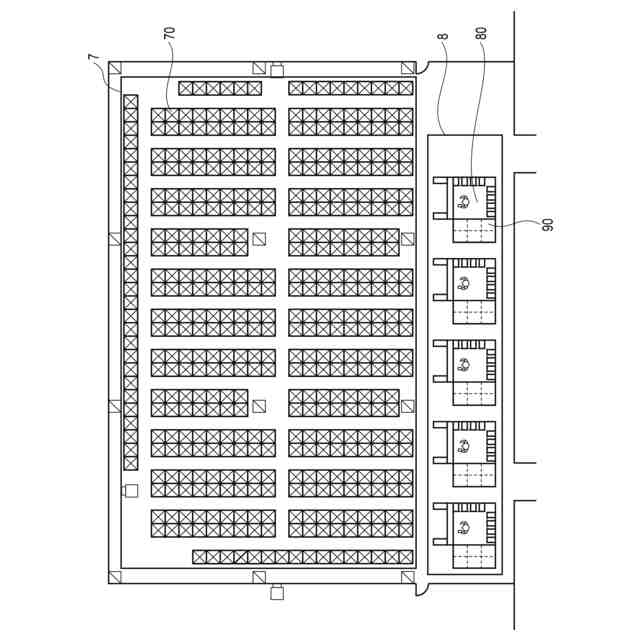
図2は、実施形態に係る倉庫内のレイアウトの一例を示す図である
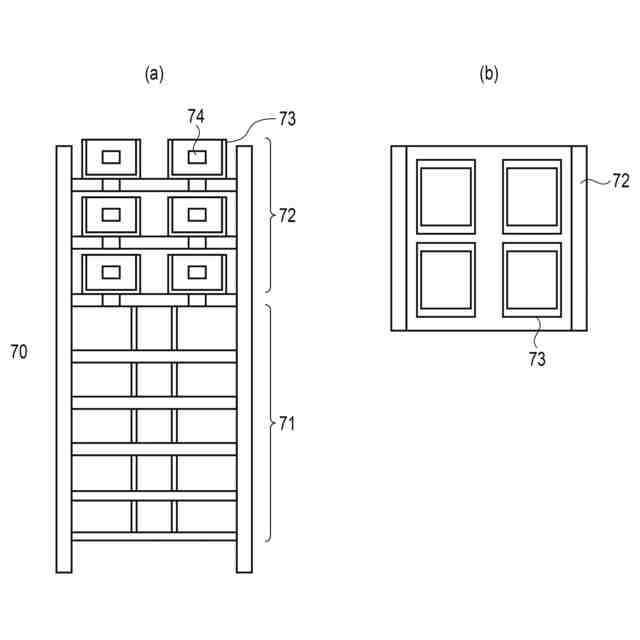
図3は、実施形態に係る棚の構成の一例を示した図である。
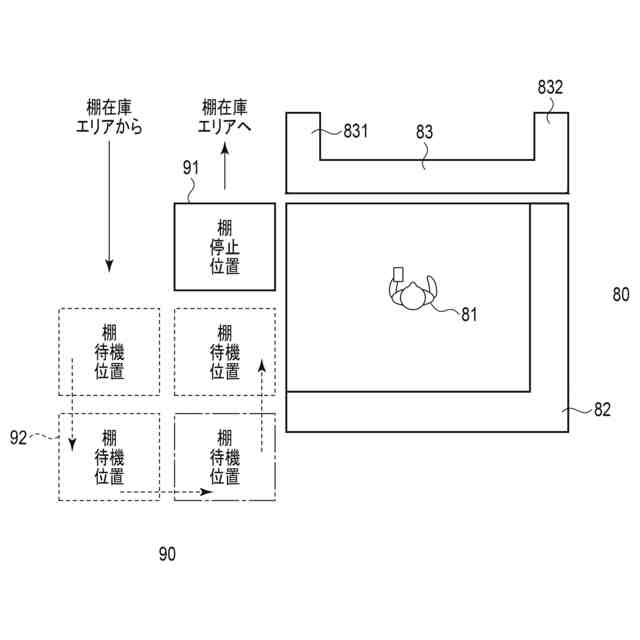
図4は、実施形態に係るピッキングステーションおよび棚待機領域の構成の一例を示した図である。
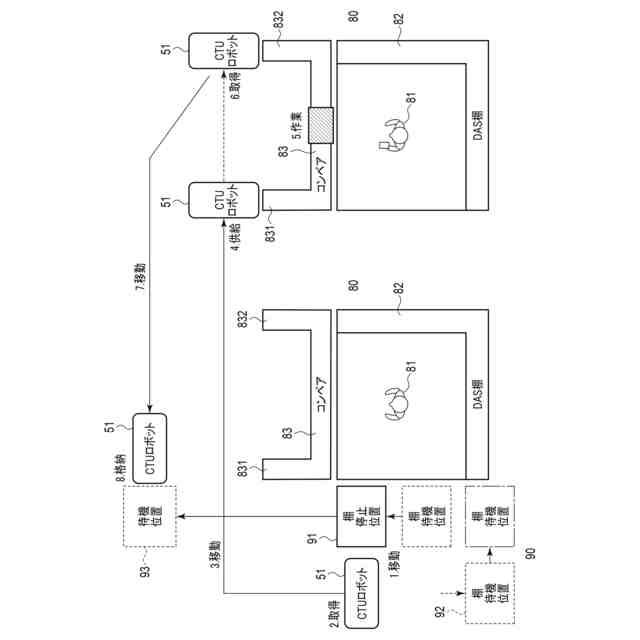
図5は、実施形態に係るピッキングステーションおよび棚待機領域における出庫処理の一例を示した図である。
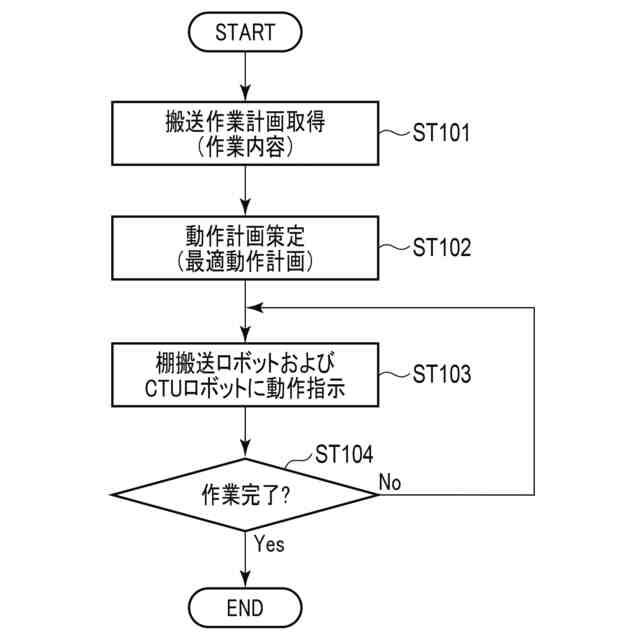
図6は、実施形態に係るWESの動作計画による物品処理の一例を示したフローチャートである。
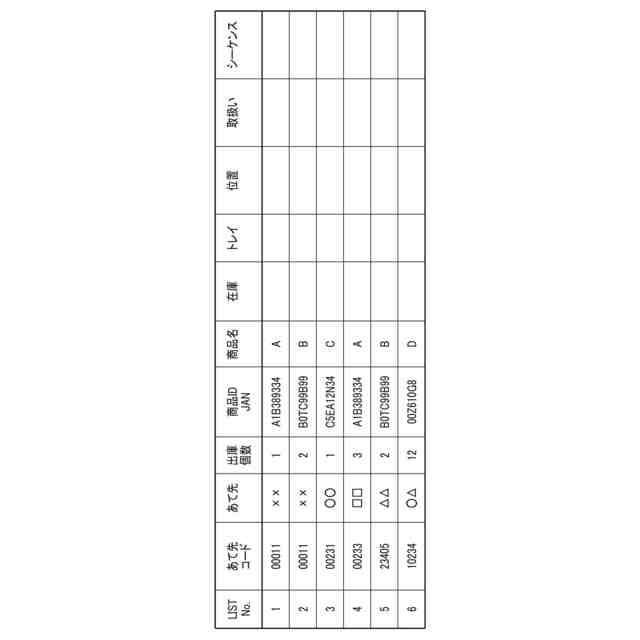
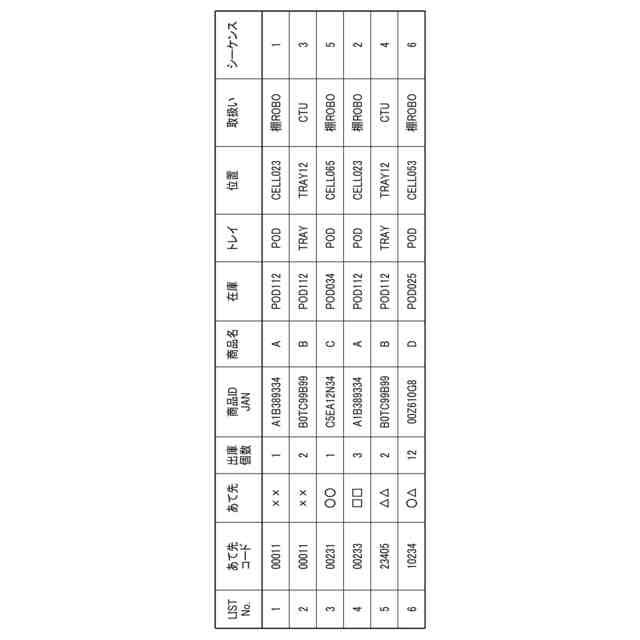
図7は、実施形態に係るWMSから取得した搬送作業計画の一例を示した図である。
図8は、実施形態に係る最適動作計画の一例を示した図である。
図9は、出庫処理におけるステップST103のさらに詳細な処理の一例を示したフローチャートである。
図10は、入庫処理におけるステップST103のさらに詳細な処理の一例を示したフローチャートである。
図11は、棚卸処理におけるステップST103のさらに詳細な処理の一例を示したフローチャートである。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら物品処理計画生成装置、物品処理計画生成方法、および物品処理計画生成プログラムについて詳細に説明する。なお、以下の実施形態では、同一の番号を付した部分については同様の動作を行うものとして、重ねての説明を省略する。例えば、複数の同一または類似の要素が存在する場合に、各要素を区別せずに説明するために共通の符号を用いることがあるし、各要素を区別して説明するために当該共通の符号に加えて枝番号を用いることもある。
【0009】
また、以下の説明において、AまたはBという記載は、AまたはBの少なくとも1つを意味し、A、B、またはCは、A、B、またはCの少なくとも1つを意味するものとする。さらに、AおよびBという記載もAおよびBのうちの少なくとも1つを意味し、A、B、およびCは、A、B、およびCのうちの少なくとも1つを意味するものとする。
【0010】
[実施形態]
(構成)
図1は、実施形態に係る物流システムの一例を示す概念図である。
図1に示すように、倉庫システムSは、倉庫管理システム(WMS:Warehouse Management System)1、および倉庫処理システム2を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
発券機
24日前
株式会社東芝
センサ
16日前
株式会社東芝
計算装置
29日前
株式会社東芝
測距装置
13日前
株式会社東芝
試験装置
23日前
株式会社東芝
電解装置
9日前
株式会社東芝
受光装置
8日前
株式会社東芝
回転電機
8日前
株式会社東芝
回転電機
8日前
株式会社東芝
回転電機
8日前
株式会社東芝
発振回路
6日前
株式会社東芝
回転電機
14日前
株式会社東芝
計算装置
29日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
13日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
7日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
27日前
株式会社東芝
真空バルブ
2日前
株式会社東芝
半導体装置
8日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
15日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ