TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043280
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2024140822
出願日
2024-08-22
発明の名称
自動走行方法、自動走行システム、及び自動走行プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250321BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車両の方位角の精度を向上させることが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供する。
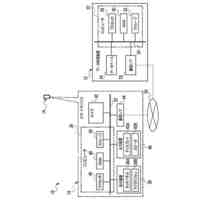
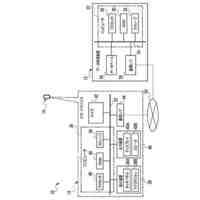
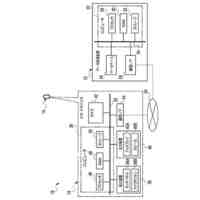
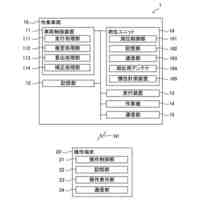
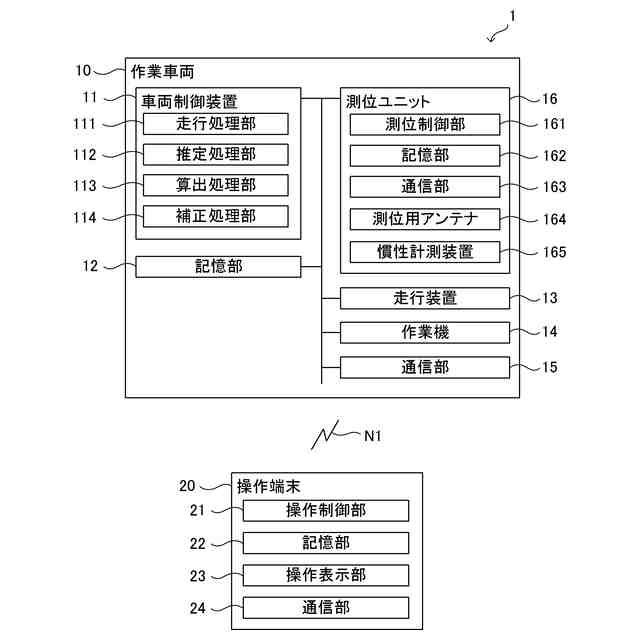
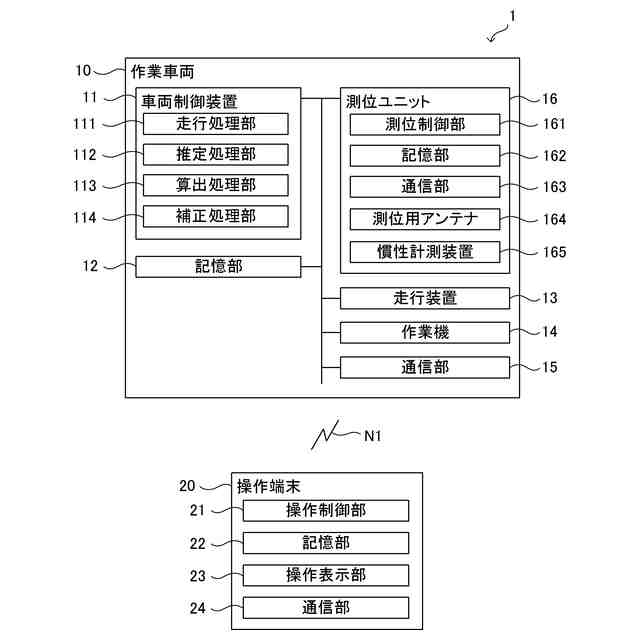
【解決手段】推定処理部112は、目標経路Rに対する作業車両10の方位角を示す車両方位角を推定する。算出処理部113は、作業車両10に設けられる測位用アンテナ164の目標経路Rに対する方位角を示すアンテナ方位角を算出する。補正処理部114は、前記車両方位角と前記アンテナ方位角との差を示す方位差に基づいて前記アンテナ方位角を補正する。走行処理部111は、補正後の前記アンテナ方位角を示す補正方位角と、作業車両10の位置情報とに基づいて、作業車両10を自動走行させる。
【選択図】図1
特許請求の範囲
【請求項1】
目標経路に対する作業車両の方位角を示す車両方位角を推定することと、
前記作業車両に設けられるアンテナの前記目標経路に対する方位角を示すアンテナ方位角を算出することと、
前記車両方位角と前記アンテナ方位角との差を示す方位差に基づいて前記アンテナ方位角を補正することと、
補正後の前記アンテナ方位角を示す補正方位角に基づいて、前記作業車両を自動走行させることと、
を実行する自動走行方法。
続きを表示(約 900 文字)
【請求項2】
前記アンテナのヨー角と前記目標経路の方位とに基づいて、前記アンテナ方位角を算出する、
請求項1に記載の自動走行方法。
【請求項3】
前記作業車両の方位角を計測する計測部により計測される計測方位角と、前記作業車両の位置情報と、前記作業車両の角速度情報とに基づいて、前記車両方位角を推定する、
請求項1に記載の自動走行方法。
【請求項4】
前記作業車両が走行した所定区間において推定される複数の前記車両方位角の平均値と、前記アンテナ方位角との前記方位差に基づいて、前記アンテナ方位角を補正する、
請求項1に記載の自動走行方法。
【請求項5】
前記作業車両を所定距離又は所定時間だけ走行させた場合に、その間に推定された前記車両方位角を用いて前記アンテナ方位角を補正する、
請求項1~4のいずれかに記載の自動走行方法。
【請求項6】
前記作業車両を所定距離又は所定時間だけ走行させた後に、前記アンテナ方位角を補正する、
請求項1~4のいずれかに記載の自動走行方法。
【請求項7】
前記作業車両の車速が所定車速以上の場合に、その間に推定された前記車両方位角を用いて前記アンテナ方位角を補正する、
請求項1~4のいずれかに記載の自動走行方法。
【請求項8】
前記アンテナ方位角が所定角度以上の場合に、前記アンテナ方位角を補正する補正処理を実行せず、ユーザーに報知する、
請求項1~4のいずれかに記載の自動走行方法。
【請求項9】
オペレータから、前記アンテナ方位角を調整するための調整モードに移行する操作を受け付けた場合に、前記アンテナ方位角の補正の要否を判定する、
請求項1~4のいずれかに記載の自動走行方法。
【請求項10】
前記調整モードに移行した場合に、前記アンテナ方位角の調整に関する情報を前記オペレータに報知する、
請求項9に記載の自動走行方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を自動走行させることが可能な自動走行方法、自動走行システム、及び自動走行プログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
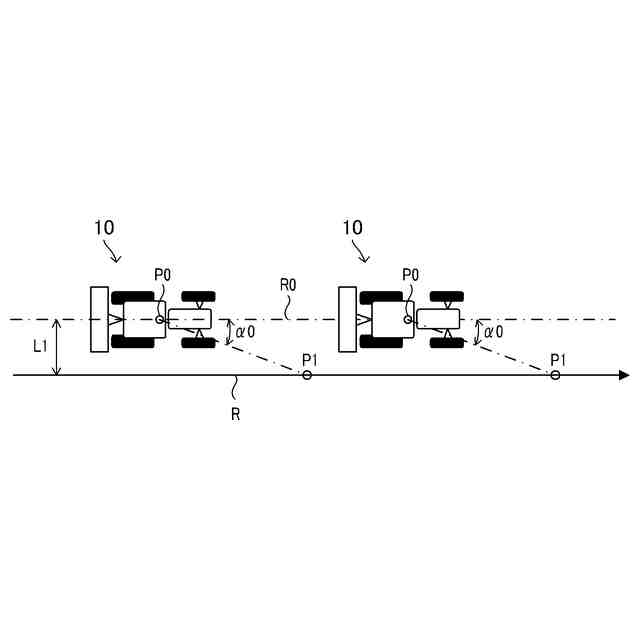
作業車両の位置情報に基づいて、予め設定された目標経路を走行することにより自動走行を行う作業車両が知られている。例えば、目標経路上に前方目標点を設定して、作業車両の方位角に基づいて作業車両が前記前方目標点に向かうように操舵制御することにより、作業車両を目標経路に従って自動走行させる技術が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-080743号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記作業車両の方位角は、アンテナのセンサー値(ヨー角(Yaw角))から算出される。ここで、前記アンテナが作業車両に対して適切な位置からずれて取り付けられる場合がある。すなわち、作業車両において、アンテナの取付誤差が生じる場合がある。アンテナの取付誤差が生じると、前記操舵制御を行っても作業車両が目標経路からずれた位置を走行してしまう問題が生じる。
【0005】
本発明の目的は、アンテナの取付状態に関わらず作業車両を目標経路に従って走行させることが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る自動走行方法は、目標経路に対する作業車両の方位角を示す車両方位角を推定することと、前記作業車両に設けられるアンテナの前記目標経路に対する方位角を示すアンテナ方位角を算出することと、前記車両方位角と前記アンテナ方位角との差を示す方位差に基づいて前記アンテナ方位角を補正することと、補正後の前記アンテナ方位角を示す補正方位角に基づいて、前記作業車両を自動走行させることと、を実行する方法である。
【0007】
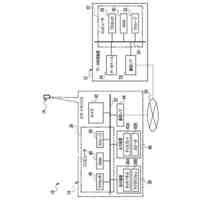
本発明に係る自動走行システムは、推定処理部と算出処理部と補正処理部と走行処理部とを備える。前記推定処理部は、目標経路に対する作業車両の方位角を示す車両方位角を推定する。前記算出処理部は、前記作業車両に設けられるアンテナの前記目標経路に対する方位角を示すアンテナ方位角を算出する。前記補正処理部は、前記車両方位角と前記アンテナ方位角との差を示す方位差に基づいて前記アンテナ方位角を補正する。前記走行処理部は、補正後の前記アンテナ方位角を示す補正方位角と、前記作業車両の位置情報とに基づいて、前記作業車両を自動走行させる。
【0008】
本発明に係る自動走行プログラムは、目標経路に対する作業車両の方位角を示す車両方位角を推定することと、前記作業車両に設けられるアンテナの前記目標経路に対する方位角を示すアンテナ方位角を算出することと、前記車両方位角と前記アンテナ方位角との差を示す方位差に基づいて前記アンテナ方位角を補正することと、補正後の前記アンテナ方位角を示す補正方位角と、前記作業車両の位置情報とに基づいて、前記作業車両を自動走行させることと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0009】
本発明によれば、アンテナの取付状態に関わらず作業車両を目標経路に従って走行させることが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供することができる。
【図面の簡単な説明】
【0010】
図1は、本発明の実施形態に係る自動走行システムの構成を示すブロック図である。
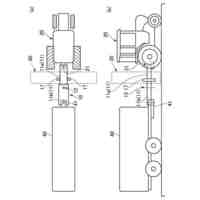
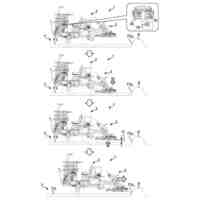
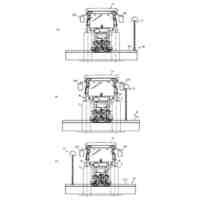
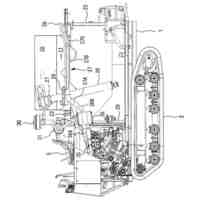
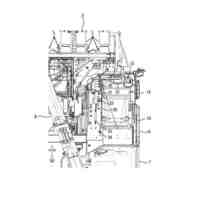
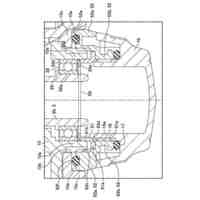
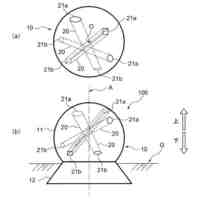
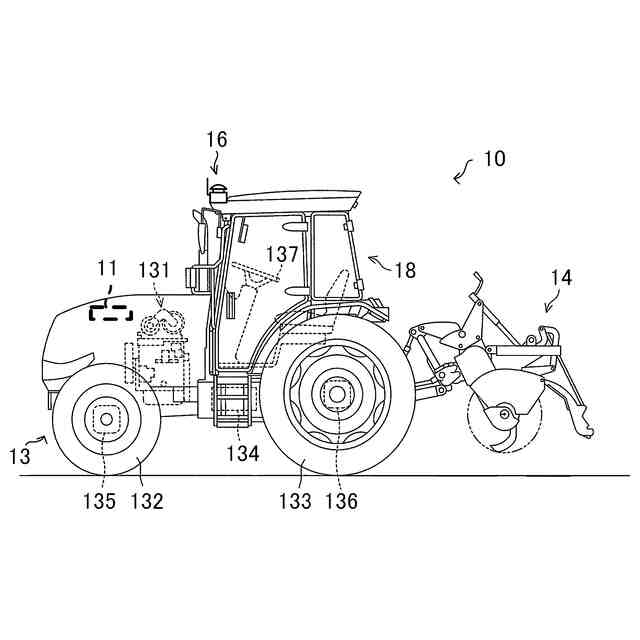
図2は、本発明の実施形態に係る作業車両の一例を示す外観図である。
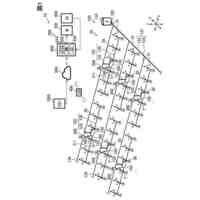
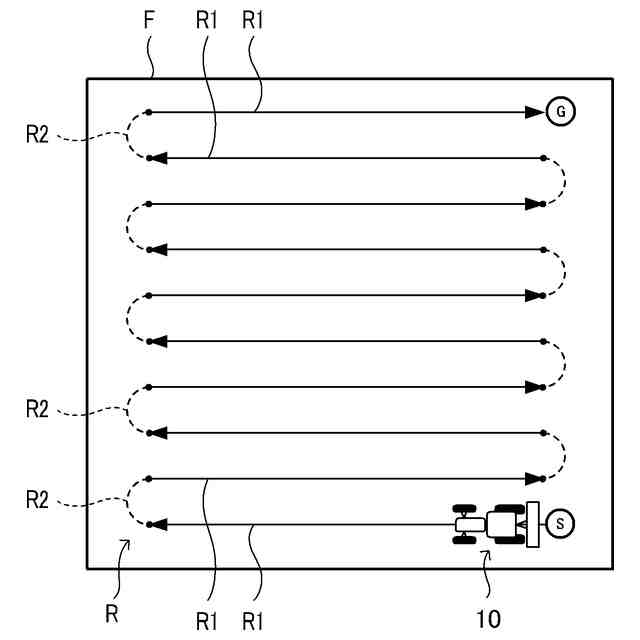
図3は、本発明の実施形態に係る作業車両の目標経路の一例を示す図である。
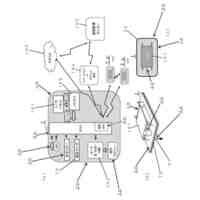
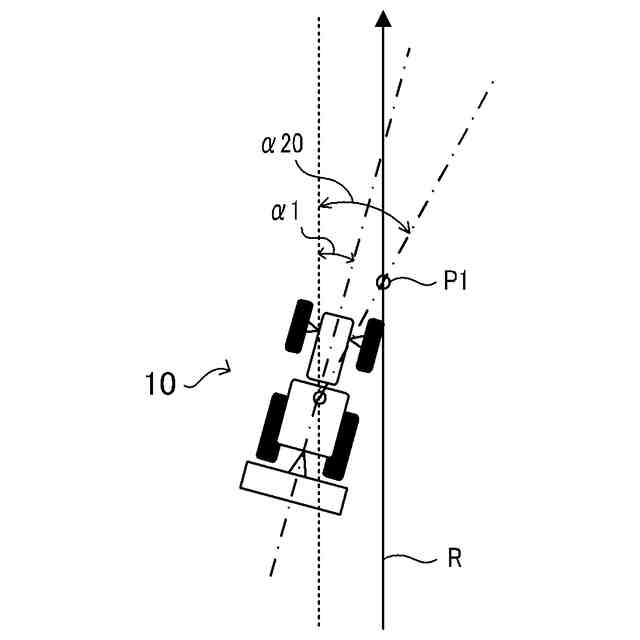
図4は、本発明の実施形態に係る作業車両の走行状態の一例を示す図である。
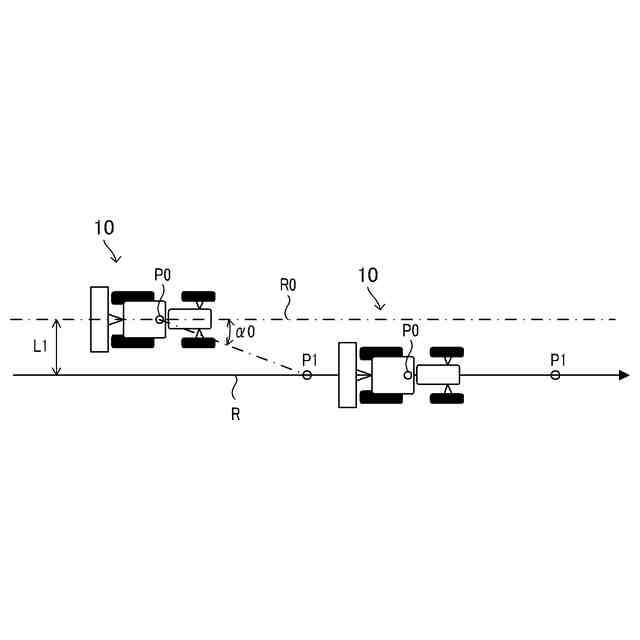
図5Aは、本発明の実施形態に係る作業車両の走行方法の具体例を示す図である。
図5Bは、本発明の実施形態に係る作業車両の走行方法の具体例を示す図である。
図6は、本発明の実施形態に係る作業車両の走行方法の具体例を示す図である。
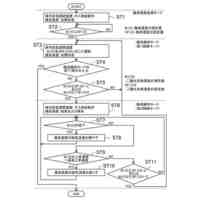
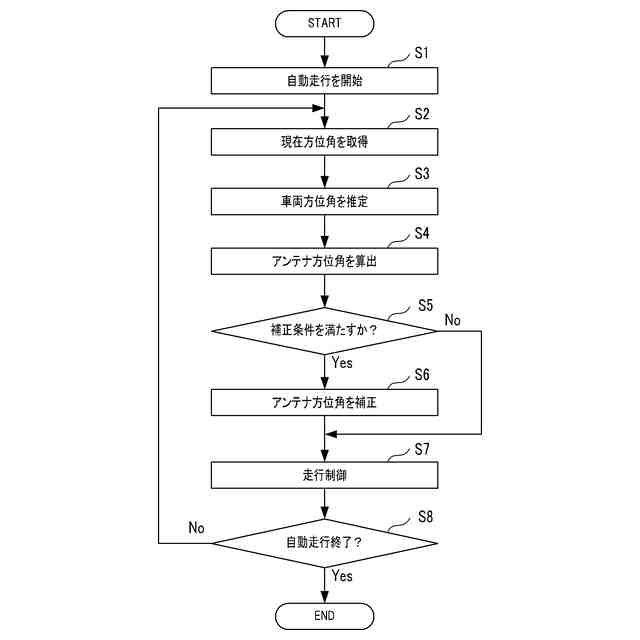
図7は、本発明の実施形態に係る自動走行システムによって実行される自動走行処理の手順の一例を示すフローチャートである。
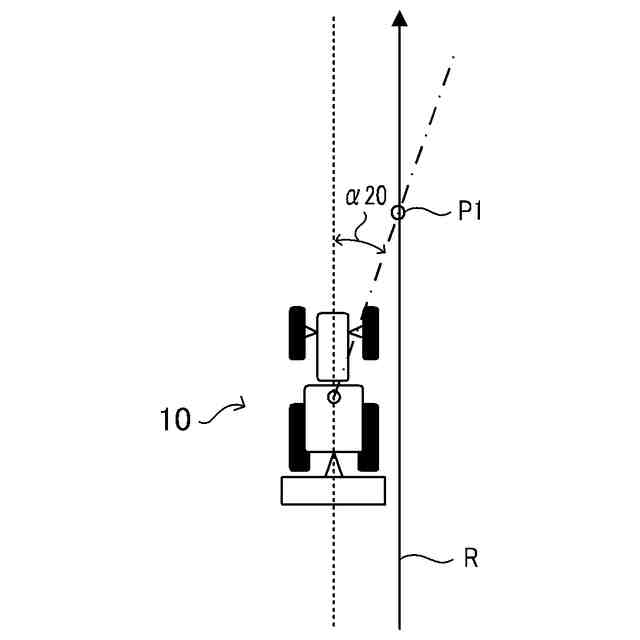
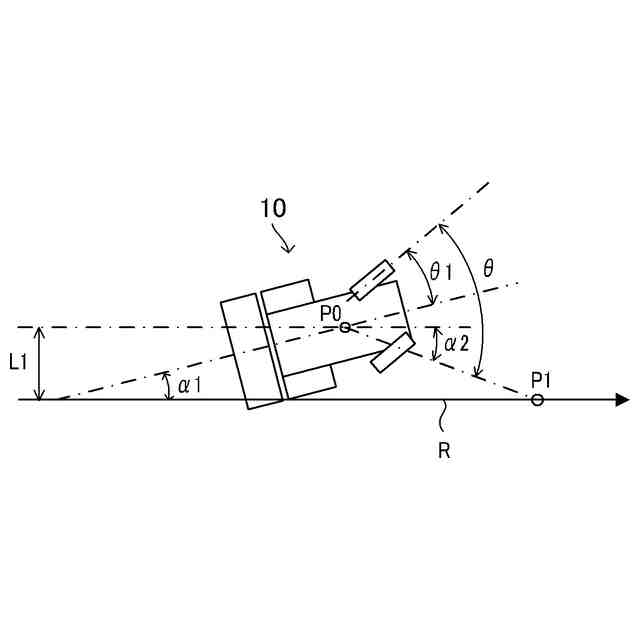
図8は、本発明の実施形態に係る作業車両の走行状態の一例を示す図である。
図9は、本発明の他の実施形態に係る車両制御装置の具体的構成を示すブロック図である。
図10は、本発明の実施形態に係る車両制御装置における推定対象区間の判定方法の一例を示す図である。
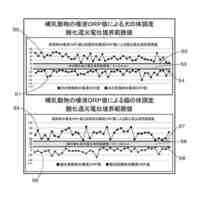
図11は、本発明の実施形態に係る車両制御装置におけるパラメータの調整方法の一例を示すグラフである。
図12は、本発明の実施形態に係る車両制御装置の他の構成を示すブロック図である。
図13は、本発明の他の実施形態に係る車両制御装置の具体的構成を示すブロック図である。
図14は、本発明の実施形態に係る車両制御装置における方位角の決定方法の一例を示すグラフである。
図15Aは、本発明の実施形態に係る車両制御装置における推定対象区間の判定方法の他の例を示す図である。
図15Bは、本発明の実施形態に係る車両制御装置における推定対象区間の判定方法の他の例を示す図である。
図16Aは、本発明の実施形態に係る車両制御装置における推定値のリセット方法の他の例を示す図である。
図16Bは、本発明の実施形態に係る車両制御装置における推定値のリセット方法の他の例を示す図である。
図16Cは、本発明の実施形態に係る車両制御装置における推定値のリセット方法の他の例を示す図である。
図17は、本発明の実施形態に係る操作端末に表示されるメニュー画面の一例を示す図である。
図18は、本発明の実施形態に係る操作端末に表示される設定画面の一例を示す図である。
図19は、本発明の実施形態に係る操作端末に表示されるYaw角初期調整画面の一例を示す図である。
図20Aは、本発明の実施形態に係る操作端末に表示される初期調整用経路設定画面の一例を示す図である。
図20Bは、本発明の実施形態に係る操作端末に表示される初期調整用経路設定画面の一例を示す図である。
図20Cは、本発明の実施形態に係る操作端末に表示される初期調整用経路設定画面の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
仕切り板付き植木鉢
7日前
美らくる株式会社
栽培方法
3日前
株式会社カインズ
キャットタワー
3日前
群馬県
節足動物および腹足動物の判定システム
1日前
大和ハウス工業株式会社
栽培装置
2日前
株式会社すとろーはうす
動物用衣服
2日前
株式会社北海コーキ
農耕用牽引車における連結構造
2日前
井関農機株式会社
作業車両
3日前
ヤンマーホールディングス株式会社
コンバイン
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
苗移植機
3日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
コンバイン
1日前
個人
唾液採取用装置を用いた哺乳動物の体調判定方法及び装置
1日前
井関農機株式会社
コンバイン
2日前
株式会社デンソー
潅水システムおよび制御装置
2日前
株式会社デンソー
潅水システムおよび制御装置
2日前
井関農機株式会社
雑草発生抑制機
2日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
2日前
国立大学法人 宮崎大学
サケ科魚類の養殖方法
7日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
1日前
有限会社 内子化成
植木鉢用受皿及び吊り下げ用植木鉢セット
2日前
イビデン株式会社
イネ科植物中の貯蔵糖量増加方法
3日前
グローブライド株式会社
魚釣用スピニングリール
7日前
日東紡績株式会社
分散液、抗菌性基材の製造方法及び接合体の製造方法
1日前
学校法人東京理科大学
生育植物の免疫応答活性化剤、及び免疫応答活性化方法
7日前
西松建設株式会社
海底工作物
7日前
ダイキン工業株式会社
空気組成調節装置、冷凍装置、及び収納庫
7日前
ダイキン工業株式会社
空気組成調節装置、冷凍装置、及び収納庫
7日前
国立研究開発法人産業技術総合研究所
熱及び二酸化炭素の利用システム
2日前
ヤンマーホールディングス株式会社
自動走行方法、自動走行システム、及び自動走行プログラム
7日前
テクニカ合同株式会社
廃棄卵の処理材、及び廃棄卵の処理方法
3日前
国立研究開発法人農業・食品産業技術総合研究機構
ミノムシの雌雄判別方法
3日前
本田技研工業株式会社
作業領域設定装置、作業領域設定システム、作業領域設定方法、およびプログラム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ