TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042978
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150220
出願日
2023-09-15
発明の名称
情報処理装置、情報処理方法および情報処理プログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G06T
7/80 20170101AFI20250321BHJP(計算;計数)
要約
【課題】空間内における対応関係の精度の分布を可視化する情報処理装置及び情報処理方法を提供する。
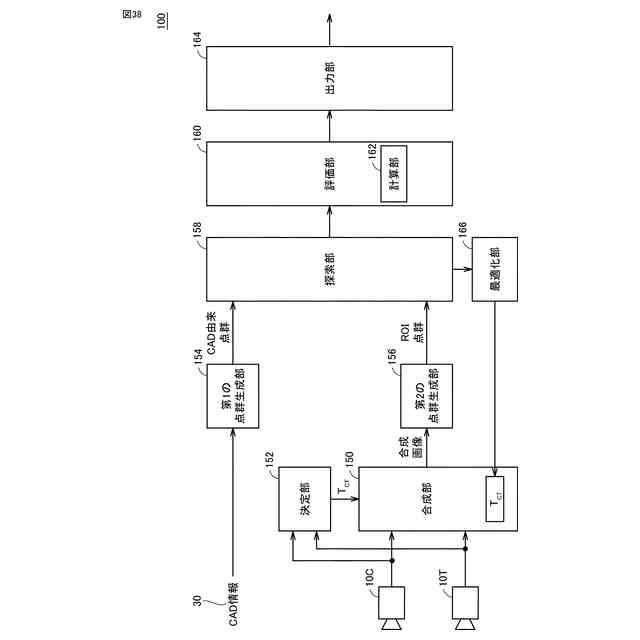
【解決手段】情報処理装置100は、リファレンス物体の設計情報に基づいて、リファレンスマーカを基準とする第1の点群を生成する第1の点群生成部と、合成画像から、リファレンスマーカを基準とする第2の点群を生成する第2の点群生成部と、第1の点群のうちから選択される第1の点ペアについて、第2の点群において第1の点ペアに対応する第2の点ペアを探索する探索部と、第1の点ペアおよび第2の点ペアの形状寸法に基づいて、対応関係の精度を計算する計算部を含む評価部と、リファレンス物体が空間の複数の計測位置に配置されたときに、それぞれの計測位置について計算される対応関係の精度をそれぞれの計測位置に関連付けて可視化する出力部と、を含む。
【選択図】図38
特許請求の範囲
【請求項1】
リファレンスマーカが配置されたリファレンス物体を第1のカメラで撮像して得られる第1の画像と前記リファレンス物体を第2のカメラで撮像して得られる第2の画像とを、前記第1のカメラの第1のカメラ座標系と前記第2のカメラの第2のカメラ座標系との対応関係に基づいて、同一の座標系上に合成して合成画像を生成する合成部と、
前記リファレンス物体の設計情報に基づいて、前記リファレンスマーカを基準とする第1の点群を生成する第1の点群生成部と、
前記合成画像から、前記リファレンスマーカを基準とする第2の点群を生成する第2の点群生成部と、
前記第1の点群のうちから選択される第1の点ペアについて、前記第2の点群において前記第1の点ペアに対応する第2の点ペアを探索する探索部と、
前記第1の点ペアおよび前記第2の点ペアの形状寸法に基づいて、前記対応関係の精度を計算する計算部と、
前記リファレンス物体が空間の複数の計測位置に配置されたときに、それぞれの計測位置について計算される前記対応関係の精度をそれぞれの計測位置に関連付けて可視化する出力部とを備える、情報処理装置。
続きを表示(約 1,700 文字)
【請求項2】
前記出力部は、前記対応関係の精度の値が濃淡および色の少なくとも一方で表現された画像を出力する、請求項1に記載の情報処理装置。
【請求項3】
前記第1の点群生成部は、前記設計情報に基づいて生成された点群のうち、前記リファレンスマーカを基準として決定される第1の領域に含まれる点群を前記第1または2の点群として抽出し、
前記第2の点群生成部は、前記合成画像に含まれる点群のうち、前記リファレンスマーカを基準として決定される第2の領域に含まれる点群を前記第2の点群を抽出する、請求項1に記載の情報処理装置。
【請求項4】
前記第1の領域および前記第2の領域の各々は、前記リファレンス物体の前記リファレンスマーカが配置された面を基準として決定される、請求項3に記載の情報処理装置。
【請求項5】
前記探索部は、前記第1の点ペアの各点に対応する前記第2の点群における座標を決定し、当該決定された座標から予め定められた距離内に存在する1または複数の点の重心に基づいて、前記第2の点ペアの各点を決定する、請求項1~4のいずれか1項に記載の情報処理装置。
【請求項6】
前記第1のカメラで前記リファレンス物体を撮像して得られる画像に基づいて計算される前記リファレンスマーカの位置および姿勢と、前記第2のカメラで前記リファレンス物体を撮像して得られる画像に基づいて計算される前記リファレンスマーカの位置および姿勢との差に基づいて、前記対応関係を決定する決定部をさらに備える、請求項1~4のいずれか1項に記載の情報処理装置。
【請求項7】
リファレンスマーカが配置されたリファレンス物体を第1のカメラで撮像して得られる第1の画像と前記リファレンス物体を第2のカメラで撮像して得られる第2の画像とを、前記第1のカメラの第1のカメラ座標系と前記第2のカメラの第2のカメラ座標系との対応関係に基づいて、同一の座標系上に合成して合成画像を生成することと、
前記リファレンス物体の設計情報に基づいて、前記リファレンスマーカを基準とする第1の点群を生成することと、
前記合成画像から、前記リファレンスマーカを基準とする第2の点群を生成することと、
前記第1の点群のうちから選択される第1の点ペアについて、前記第2の点群において前記第1の点ペアに対応する第2の点ペアを探索することと、
前記第1の点ペアおよび前記第2の点ペアの形状寸法に基づいて、前記対応関係の精度を計算することと、
前記リファレンス物体が空間の複数の計測位置に配置されたときに、それぞれの計測位置について計算される前記対応関係の精度をそれぞれの計測位置に関連付けて可視化することとを備える、情報処理方法。
【請求項8】
コンピュータに、
リファレンスマーカが配置されたリファレンス物体を第1のカメラで撮像して得られる第1の画像と前記リファレンス物体を第2のカメラで撮像して得られる第2の画像とを、前記第1のカメラの第1のカメラ座標系と前記第2のカメラの第2のカメラ座標系との対応関係に基づいて、同一の座標系上に合成して合成画像を生成することと、
前記リファレンス物体の設計情報に基づいて、前記リファレンスマーカを基準とする第1の点群を生成することと、
前記合成画像から、前記リファレンスマーカを基準とする第2の点群を生成することと、
前記第1の点群のうちから選択される第1の点ペアについて、前記第2の点群において前記第1の点ペアに対応する第2の点ペアを探索することと、
前記第1の点ペアおよび前記第2の点ペアの形状寸法に基づいて、前記対応関係の精度を計算することと、
前記リファレンス物体が空間の複数の計測位置に配置されたときに、それぞれの計測位置について計算される前記対応関係の精度をそれぞれの計測位置に関連付けて可視化することとを実行させる、情報処理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数のカメラについてのレジストレーションに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
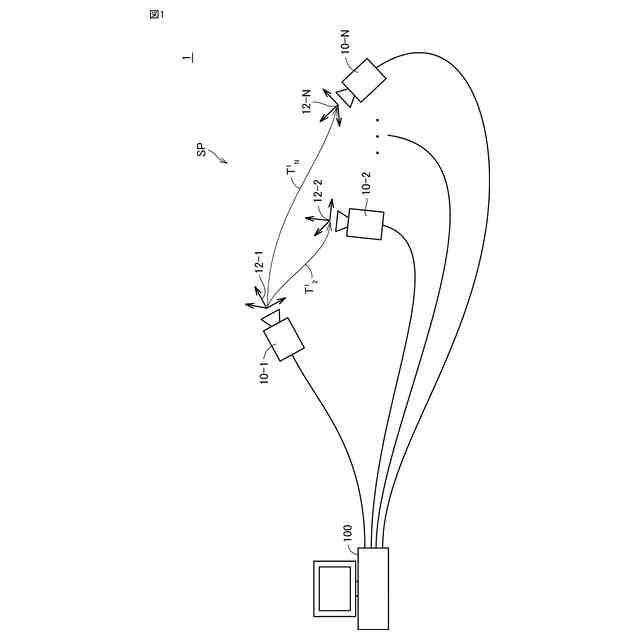
例えば、自立ロボットを実現するためには、空間の認識が必要である。空間の認識には、例えば、複数のカメラで撮像される複数の画像を用いる方法が採用されてもよい。複数のカメラを用いる場合には、当該複数のカメラ間の位置合わせ(レジストレーションあるいはカメラレジストレーション)が必要となる。レジストレーションにより、カメラの外部パラメータ(同次変換行列)が決定される。
【0003】
例えば、特開2022-039906号公報(特許文献1)は、カメラの内部パラメータキャリブレーションと、レーザーレーダ-カメラの外部パラメータキャリブレーションとを含むマルチセンサによる複合キャリブレーション方法などを開示する。
【先行技術文献】
【特許文献】
【0004】
特開2022-039906号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の先行技術文献においては、キャリブレーションの精度が向上されていると開示されているが、キャリブレーションの精度自体を評価する方法については開示されていない。
【0006】
本発明は、空間内における対応関係の精度の分布を可視化するための新たな方法を提供することを一つの目的とする。
【課題を解決するための手段】
【0007】
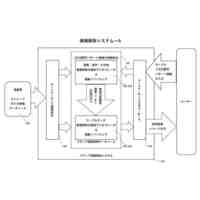
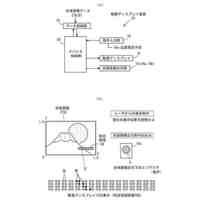
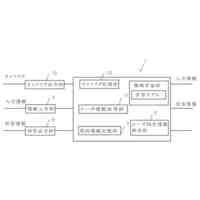
本発明の一例に従う情報処理装置は、リファレンスマーカが配置されたリファレンス物体を第1のカメラで撮像して得られる第1の画像とリファレンス物体を第2のカメラで撮像して得られる第2の画像とを、第1のカメラの第1のカメラ座標系と第2のカメラの第2のカメラ座標系との対応関係に基づいて、同一の座標系上に合成して合成画像を生成する合成部と、リファレンス物体の設計情報に基づいて、リファレンスマーカを基準とする第1の点群を生成する第1の点群生成部と、合成画像から、リファレンスマーカを基準とする第2の点群を生成する第2の点群生成部と、第1の点群のうちから選択される第1の点ペアについて、第2の点群において第1の点ペアに対応する第2の点ペアを探索する探索部と、第1の点ペアおよび第2の点ペアの形状寸法に基づいて、対応関係の精度を計算する計算部と、リファレンス物体が空間の複数の計測位置に配置されたときに、それぞれの計測位置について計算される対応関係の精度をそれぞれの計測位置に関連付けて可視化する出力部とを含む。
【0008】
この構成によれば、各計測位置に配置されたリファレンス物体について得られた第1の点ペアおよび第2の点ペアの形状寸法に基づいて、各計測位置における対応関係の精度が計算される。それぞれの計測位置における対応関係の精度が可視化されるので、空間内における精度分布が定量化される。可視化された結果により、ユーザによる精度分布の把握を容易化できる。
【0009】
出力部は、対応関係の精度の値が濃淡および色の少なくとも一方で表現された画像を出力してもよい。この構成によれば、空間的な精度分布の把握を容易化する。
【0010】
第1の点群生成部は、設計情報に基づいて生成された点群のうち、リファレンスマーカを基準として決定される第1の領域に含まれる点群を第1または2の点群として抽出してもよい。第2の点群生成部は、合成画像に含まれる点群のうち、リファレンスマーカを基準として決定される第2の領域に含まれる点群を第2の点群を抽出してもよい。この構成によれば、リファレンスマーカが配置された面を基準とすることで、第1の点ペアと第2の点ペアとの対応付けに必要な点群を最適化できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報検索システム
12日前
キヤノン株式会社
電子機器
11日前
キヤノン株式会社
電子機器
11日前
キヤノン株式会社
電子機器
11日前
株式会社イノベイト
広告装置
14日前
キヤノン電子株式会社
通信システム
4日前
合同会社IPマネジメント
内部不正対策
19日前
トヨタ自動車株式会社
作業評価装置
4日前
トヨタ自動車株式会社
管理システム
6日前
TDK株式会社
等価回路
6日前
株式会社NURSY
再就職の支援装置
5日前
西松建設株式会社
計測システム
10日前
個人
公益寄付インタラクティブシステム
4日前
個人
外国為替証拠金取引定期自動売買システム
17日前
株式会社ヒニアラタ
障害者支援システム
19日前
富士フイルム株式会社
タッチセンサ
4日前
大王製紙株式会社
作業管理システム
5日前
サクサ株式会社
警備サービス管理システム
14日前
キオクシア株式会社
電子機器
10日前
株式会社インテック
触覚ディスプレイ装置
5日前
ジャペル株式会社
登録管理システム
10日前
株式会社デンソー
情報処理方法
4日前
キヤノン株式会社
画像処理方法
17日前
株式会社デンソー
情報処理方法
12日前
個人
チャットボットを用いたシステム
10日前
富士通株式会社
画像生成方法
3日前
大和ハウス工業株式会社
概算システム
19日前
日立建機株式会社
作業支援システム
6日前
アスエネ株式会社
温室効果ガス排出量管理方法
10日前
トヨタ自動車株式会社
車載コンピュータ
13日前
アスエネ株式会社
温室効果ガス排出量管理方法
10日前
アスエネ株式会社
温室効果ガス排出量管理方法
10日前
トヨタ自動車株式会社
作業支援システム
12日前
アスエネ株式会社
温室効果ガス排出量管理方法
10日前
個人
プログラム及び情報処理方法
17日前
アスエネ株式会社
温室効果ガス排出量管理方法
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ