TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025041441
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148752
出願日
2023-09-13
発明の名称
吸着パッド及び物品保持装置
出願人
株式会社ダイフク
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
15/06 20060101AFI20250318BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物品に対する吸着性を向上することができる吸着パッド及び物品保持装置を提供する。
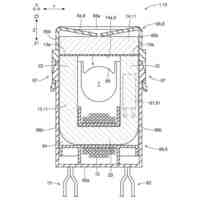
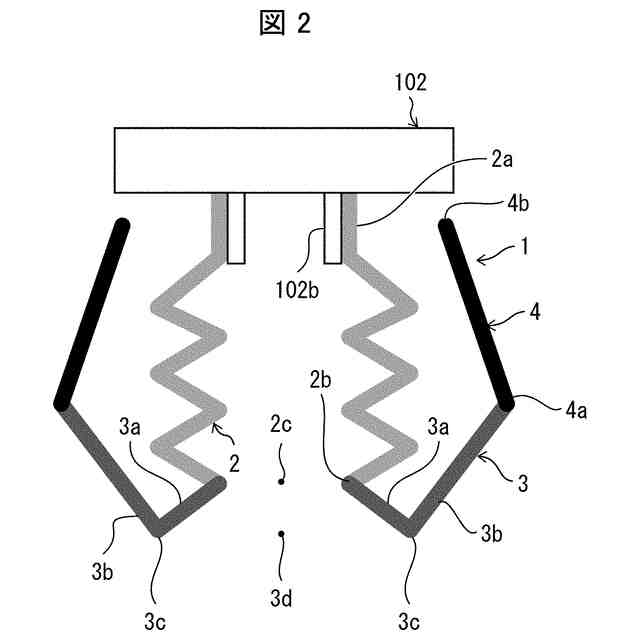
【解決手段】吸着パッド(1)は、一端(2a)がパッド取付部(102)に接続される吸引部(2)と、吸引部(2)の他端(2b)に接続され、吸引部(2)から離れるにつれて拡径する第1吸着部(3a)、及び第1吸着部(3a)からパッド取付部(102)側へ折り返され、第1吸着部(3a)から離れるにつれて拡径する第2吸着部(3b)を有する吸着部(3)と、物品の非吸着時における第2吸着部(3b)の形状を保持する形状保持部(4)と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
物品を保持する物品保持装置の吸引口が設けられたパッド取付部に取り付けられる吸着パッドであって、
一端が前記パッド取付部に接続される蛇腹筒状の吸引部と、
前記一端とは反対側の前記吸引部の他端に繋がって物品に吸着する吸着部であって、前記吸引部の前記他端に接続され、前記吸引部から離れるにつれて拡径する第1吸着部、及び前記第1吸着部から前記パッド取付部側へ折り返され、前記第1吸着部から離れるにつれて拡径する第2吸着部を有する吸着部と、
前記吸着部の前記第2吸着部側に繋がって前記吸引部の周囲に配置され、前記物品の非吸着時における前記第2吸着部の形状を保持する形状保持部と、
を備える、吸着パッド。
続きを表示(約 670 文字)
【請求項2】
前記物品の非吸着時において、前記形状保持部は、前記パッド取付部から離間して配置される、請求項1に記載の吸着パッド。
【請求項3】
前記形状保持部は、前記第2吸着部から離れるにつれて縮径するように設けられている、請求項1に記載の吸着パッド。
【請求項4】
前記形状保持部は、前記吸着部よりも、高い剛性を有する、請求項1に記載の吸着パッド。
【請求項5】
前記形状保持部において、前記パッド取付部に切離可能な導電性部材が設けられている、請求項1から4のいずれか1項に記載の吸着パッド。
【請求項6】
吸引口が設けられたパッド取付部を有する物品保持装置であって、
一端が前記パッド取付部に接続される蛇腹筒状の吸引部と、
前記一端とは反対側の前記吸引部の他端に繋がって物品に吸着する吸着部であって、前記吸引部の前記他端に接続され、前記吸引部から離れるにつれて拡径する第1吸着部、及び前記第1吸着部から前記パッド取付部側へ折り返され、前記第1吸着部から離れるにつれて拡径する第2吸着部を有する吸着部と、
前記吸着部の前記第2吸着部側に繋がって前記吸引部の周囲に配置され、前記物品の非吸着時における前記第2吸着部の形状を保持する形状保持部と、を具備する吸着パッド
を備える物品保持装置。
【請求項7】
前記パッド取付部においては、前記形状保持部の近接または接触を検知する検知部材が設けられている、請求項6に記載の物品保持装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、吸着パッド及び物品保持装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、工場や倉庫等において、例えば、多種多量の物品を効率よく出荷先別に選別仕分けするために、ピッキング装置(移載装置)が用いられている。このようなピッキング装置は、物品(被吸着物)を吸着するための吸着パッドを備え、当該吸着パッドによって物品を吸着した状態で当該物品を所望の位置に移載するよう構成されている。
【0003】
この種の吸着パッドに関し、特許文献1には、物品に接触する接触部に、複数の凹部によって分離された弾性花弁状部を設けた吸着パッドが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-89936号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した従来の吸着パッドでは、物品に対する吸着性に改善の余地があった。
【0006】
本開示は、物品に対する吸着性を向上することができる吸着パッド及び物品保持装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本開示の一態様に係る吸着パッドは、物品を保持する物品保持装置の吸引口が設けられたパッド取付部に取り付けられる吸着パッドであって、一端が前記パッド取付部に接続される蛇腹筒状の吸引部と、前記一端とは反対側の前記吸引部の他端に繋がって物品に吸着する吸着部であって、前記吸引部の前記他端に接続され、前記吸引部から離れるにつれて拡径する第1吸着部、及び前記第1吸着部から前記パッド取付部側へ折り返され、前記第1吸着部から離れるにつれて拡径する第2吸着部を有する吸着部と、前記吸着部の前記第2吸着部側に繋がって前記吸引部の周囲に配置され、前記物品の非吸着時における前記第2吸着部の形状を保持する形状保持部と、を備える。
【0008】
また、本開示の一態様に係る物品保持装置は、吸引口が設けられたパッド取付部を有する物品保持装置であって、一端が前記パッド取付部に接続される蛇腹筒状の吸引部と、前記一端とは反対側の前記吸引部の他端に繋がって物品に吸着する吸着部であって、前記吸引部の前記他端に接続され、前記吸引部から離れるにつれて拡径する第1吸着部、及び前記第1吸着部から前記パッド取付部側へ折り返され、前記第1吸着部から離れるにつれて拡径する第2吸着部を有する吸着部と、前記吸着部の前記第2吸着部側に繋がって前記吸引部の周囲に配置され、前記物品の非吸着時における前記第2吸着部の形状を保持する形状保持部と、を具備する吸着パッドを備える。
【発明の効果】
【0009】
本開示の一態様によれば、物品に対する吸着性を向上することができる吸着パッド及び物品保持装置を提供することができる。
【図面の簡単な説明】
【0010】
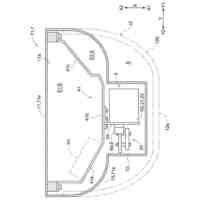
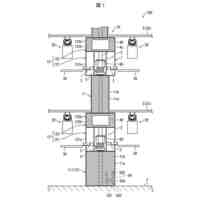
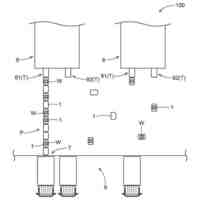
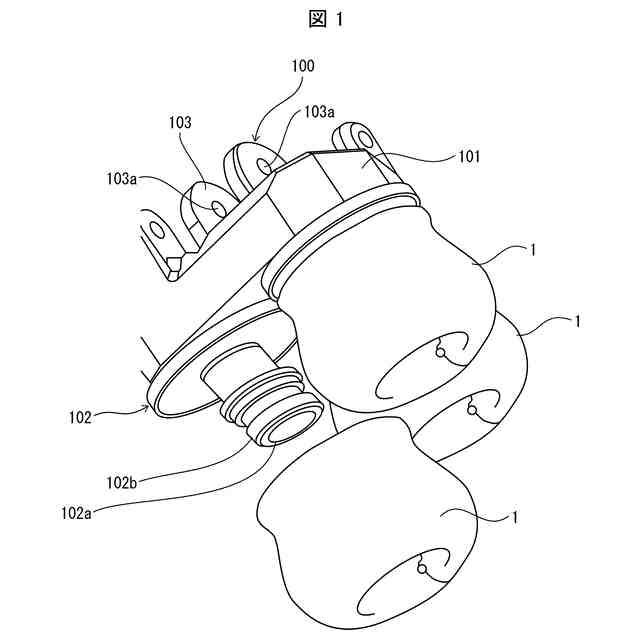
本開示の実施形態1に係る吸着パッド及びこれを用いた物品保持装置の要部構成例を示す斜視図である。
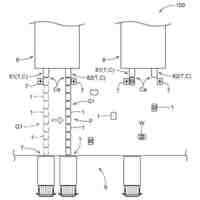
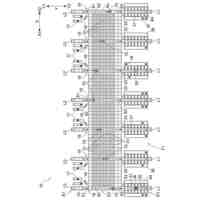
上記吸着パッドの要部構成例を説明する切断部端面図である。
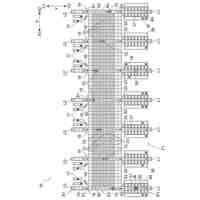
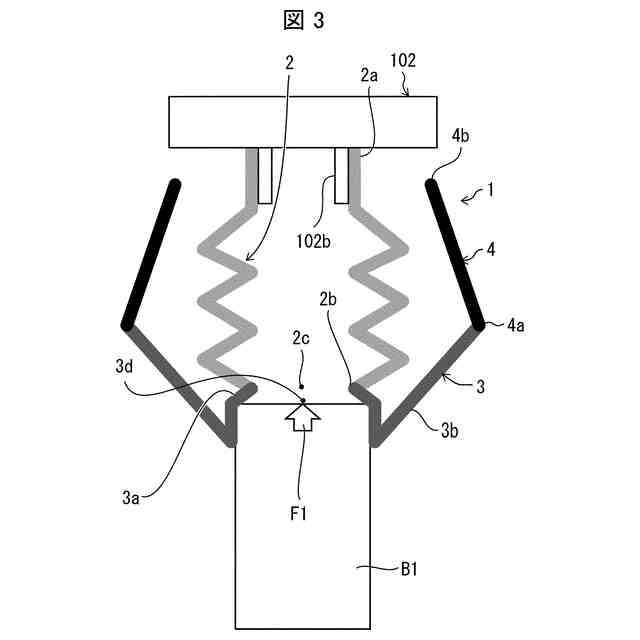
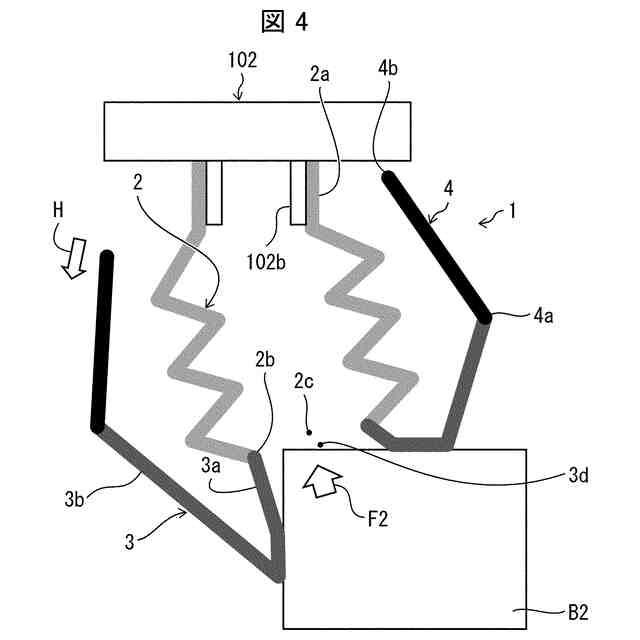
上記吸着パッドの動作例を説明する切断部端面図である。
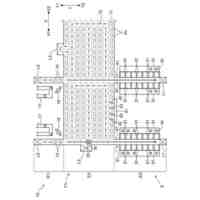
上記吸着パッドの別の動作例を説明する切断部端面図である。
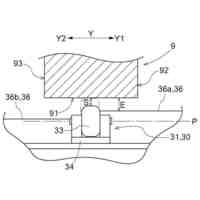
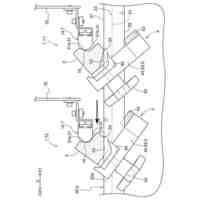
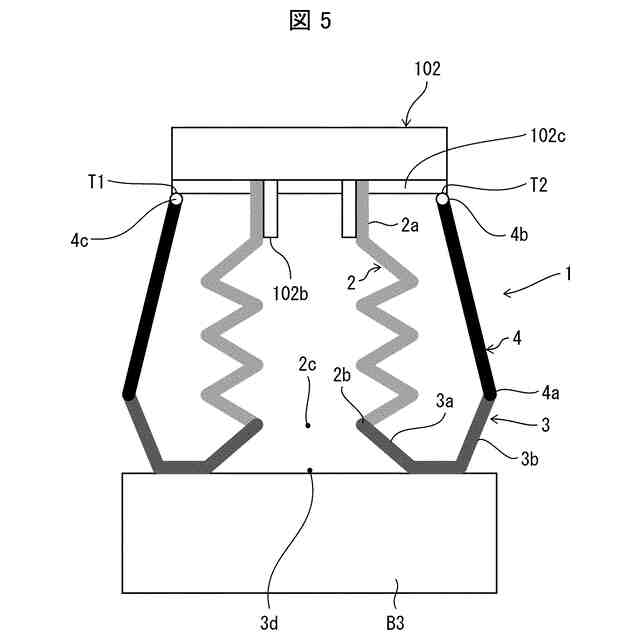
本開示の実施形態2に係る吸着パッド及びパッド取付部の要部構成例及び動作例を説明する切断部端面図である。
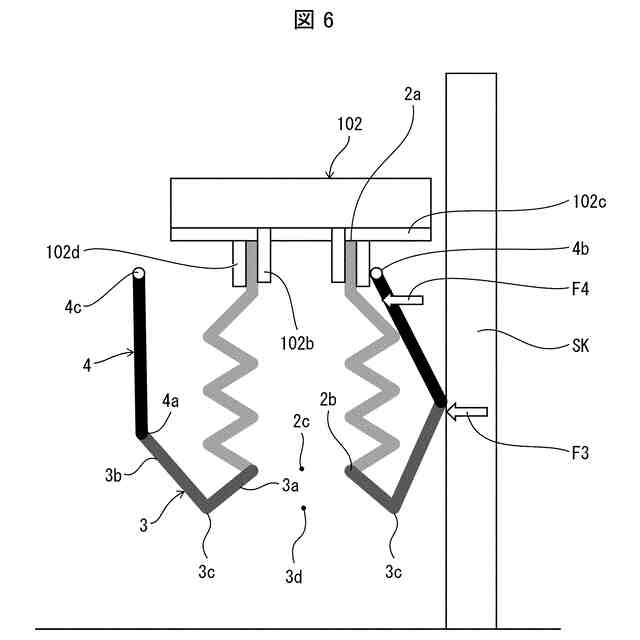
図5に示したパッド取付部の変形例の要部構成例及び動作例を説明する切断部端面図である。
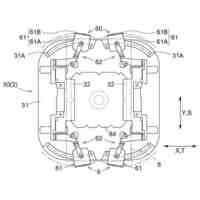
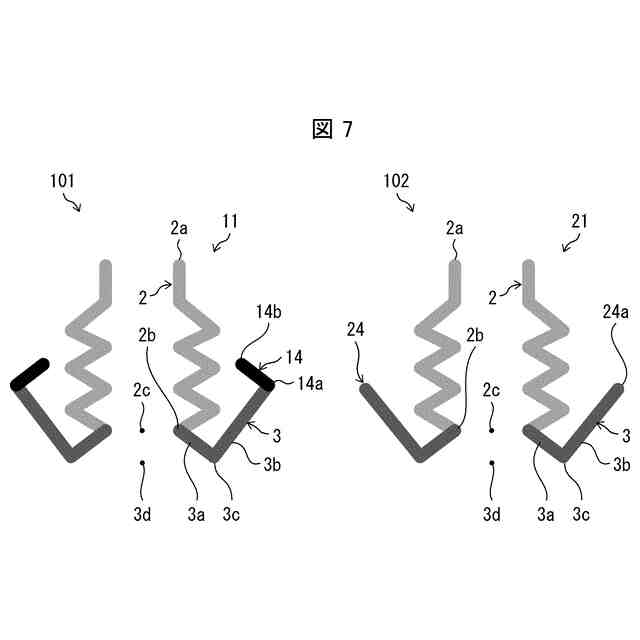
変形例1及び2に係る吸着パッドの要部構成例を説明する切断部端面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイフク
搬送車
今日
株式会社ダイフク
受電装置
8日前
株式会社ダイフク
搬送設備
29日前
株式会社ダイフク
搬送装置
1か月前
株式会社ダイフク
階間搬送装置
2日前
株式会社ダイフク
物品搬送設備
21日前
株式会社ダイフク
走行規制装置
29日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品仕分け設備
12日前
株式会社ダイフク
物品仕分け設備
12日前
株式会社ダイフク
物品仕分け設備
21日前
株式会社ダイフク
スタッカクレーン
5日前
株式会社ダイフク
位置関係検出システム
1か月前
株式会社ダイフク
搬送装置、および搬送装置の調整方法
6日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
27日前
株式会社不二越
ロボット
1か月前
株式会社不二越
ロボット
19日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
東京都公立大学法人
対象物把持装置
2日前
工機ホールディングス株式会社
作業機
1か月前
株式会社デンソー
操縦桿
1か月前
個人
バール
1か月前
庄内機械株式会社
釘打装置
6日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社アイエイアイ
グリッパー
8日前
住友重機械工業株式会社
ロボット
13日前
株式会社イノウ
給油口キャップ用開閉具
20日前
川崎重工業株式会社
制動システム
19日前
株式会社不二越
垂直多関節ロボット
20日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
オークラ輸送機株式会社
ハンド装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ