TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025041035
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148082
出願日
2023-09-13
発明の名称
測量システム及び測量方法及び測量プログラム
出願人
株式会社トプコン
代理人
個人
主分類
G01C
15/06 20060101AFI20250318BHJP(測定;試験)
要約
【課題】測定点の測定精度の向上を図る測量システム及び測量方法及び測量プログラムを提供する。
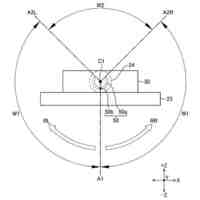
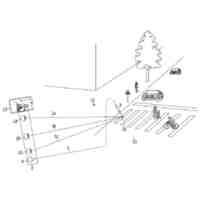
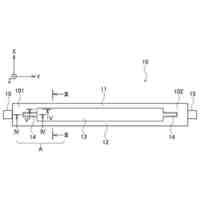
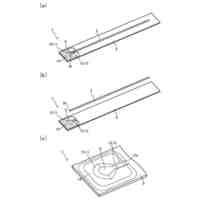
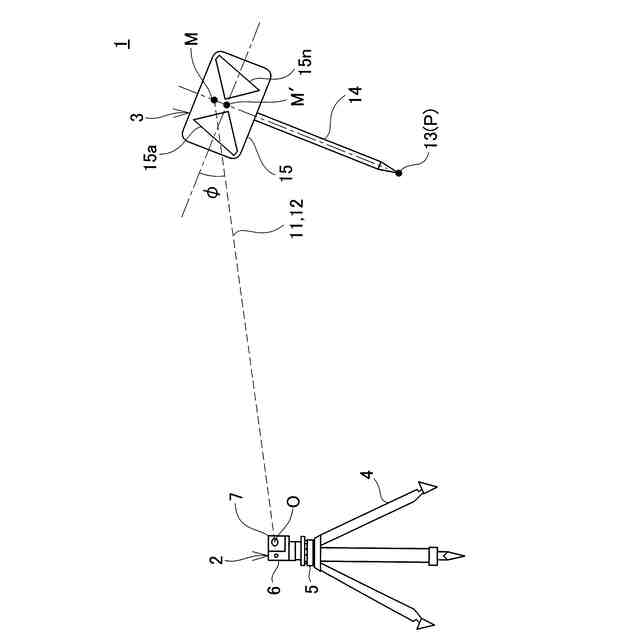
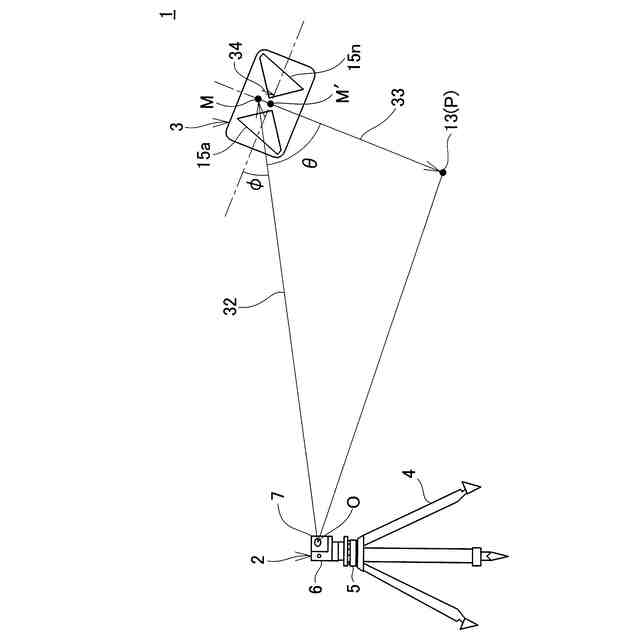
【解決手段】ポール14と、該ポールの下端からの距離が既知であるターゲット15とを有するターゲット装置3と、前記ターゲットを測定可能な測量装置2とを有する測量システム1であって、前記ポールの下端を所定の測定点13に合致させ、前記測量装置は該測量装置の器械中心と前記ターゲットの測定位置とを結ぶO-Mベクトルと、前記測定位置と前記測定点とを結ぶM-Pベクトルを演算し、該M-Pベクトルと直交し前記測定位置を通る平面と前記O-Mベクトルとのなす角度φを演算し、該角度φに基づき前記測定位置と前記ターゲットの光学中心との測定誤差を演算し、該測定誤差に基づき前記測定位置を補正し、補正した測定位置に基づき前記測定点の3次元座標を演算する様構成された。
【選択図】図1
特許請求の範囲
【請求項1】
ポールと、該ポールの下端からの距離が既知であるターゲットとを有するターゲット装置と、前記ターゲットを測定可能な測量装置とを有する測量システムであって、前記ポールの下端を所定の測定点に合致させ、前記測量装置は該測量装置の器械中心と前記ターゲットの測定位置とを結ぶO-Mベクトルと、前記測定位置と前記測定点とを結ぶM-Pベクトルを演算し、該M-Pベクトルと直交し前記測定位置を通る平面と前記O-Mベクトルとのなす角度φを演算し、該角度φに基づき前記測定位置と前記ターゲットの光学中心との測定誤差を演算し、該測定誤差に基づき前記測定位置を補正し、補正した測定位置に基づき前記測定点の3次元座標を演算する様構成された測量システム。
続きを表示(約 1,500 文字)
【請求項2】
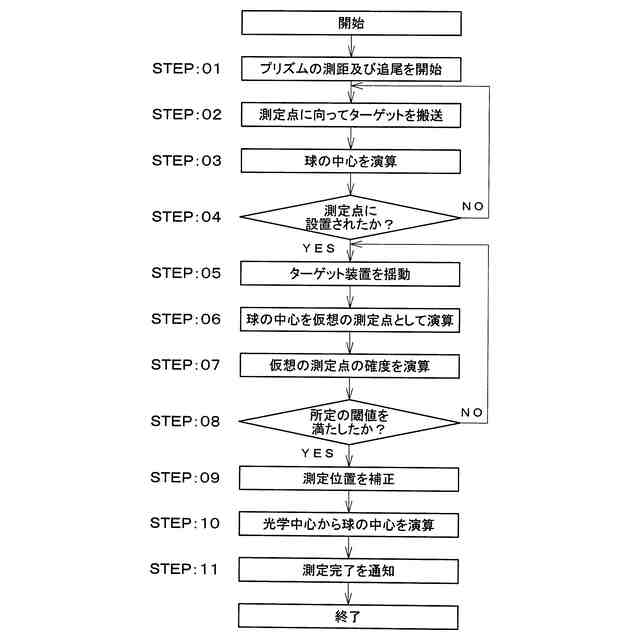
前記ターゲット装置は、前記ポールの下端を所定の測定点に合致させた状態で、前記ポールを揺動させ、前記測量装置は少なくとも3点で前記ターゲットを測定し、各ターゲットの測定位置に基づき仮想の測定点の3次元座標を演算し、前記ターゲットの測定位置と前記仮想の測定点とに基づき前記M-Pベクトルを演算する様構成された請求項1に記載の測量システム。
【請求項3】
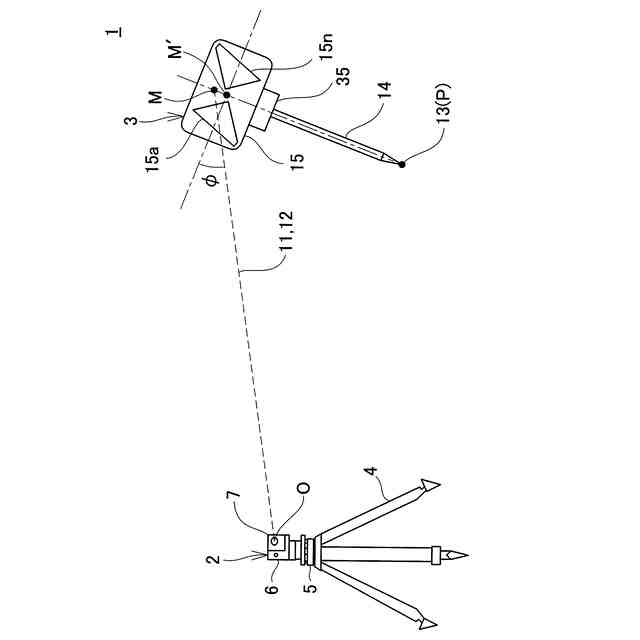
前記ターゲット装置は傾斜センサを更に有し、前記測量装置は前記測定位置と前記傾斜センサが検出した前記ポールの姿勢に基づき前記M-Pベクトルを演算する様構成された請求項1に記載の測量システム。
【請求項4】
前記測量装置は、前記測定点と前記仮想の測定点の一致度を確度として演算し、該確度が予め設定した閾値を満たした時に、各ターゲットの測定位置をそれぞれ補正し、補正した各測定位置に基づき前記仮想の測定点を測定点として再度演算し、測定完了の動作を行う様構成された請求項2に記載の測量システム。
【請求項5】
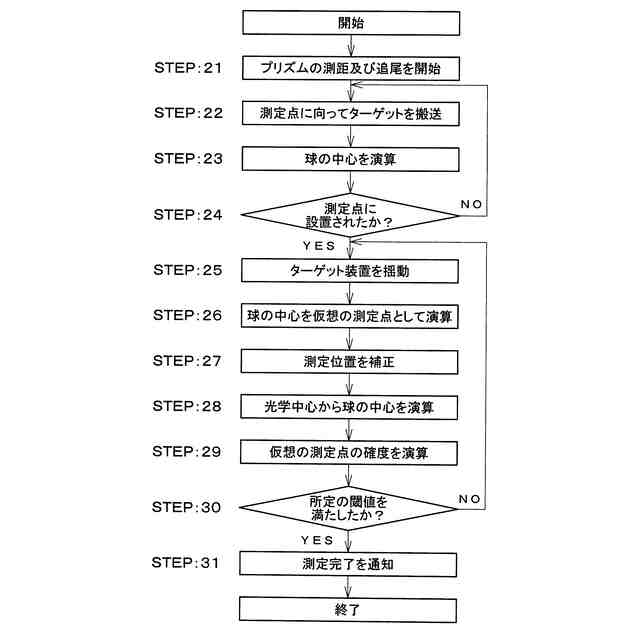
前記測量装置は、前記仮想の測定点が演算される毎に前記ターゲットの全ての測定位置を補正し、補正した該測定位置に基づき前記仮想の測定点を再度演算し、前記測定点と前記仮想の測定点の一致度を確度として演算し、該確度が予め設定した閾値を満たした時に前記仮想の測定点を測定点とみなして測定完了の動作を行う様構成された請求項2に記載の測量システム。
【請求項6】
前記測量装置は、前記ポールの下端から前記ターゲット迄の距離を半径とし、各測定位置にフィッティングする球の中心を前記測定点として演算し、前記球の半径を1として規格化した基準球を演算し、該基準球の表面の点群を全て含む最小の曲面の面積を演算し、該曲面と予め設定された基準曲面との比較に基づき前記確度を演算する様構成された請求項4又は請求項5に記載の測量システム。
【請求項7】
前記測量装置は、追尾機能を更に有し、前記測量装置は前記ターゲットを追尾しつつ測定可能に構成された請求項6に記載の測量システム。
【請求項8】
前記測量装置は、前記ターゲットを測定する毎に、連続して測定された少なくとも3つの前記ターゲットの測定位置にフィッティングする球を順次演算し、各球の中心間の距離が予め設定された閾値の範囲内に収束するかに基づき、前記ターゲット装置が前記測定点に設置されたかどうかを判断する様構成された請求項7の測量システム。
【請求項9】
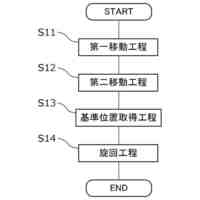
ポールの下端を所定の測定点に合致させた状態で、測量装置の器械中心と前記ポールの上端に設けられたターゲットの測定位置を結ぶO-Mベクトルと、前記測定位置と測定点とを結ぶM-Pベクトルとを演算する工程と、該M-Pベクトルと直交し前記測定位置を通る平面と前記O-Mベクトルとのなす角度φを演算する工程と、該角度φに基づき前記測定位置と前記ターゲットの光学中心との測定誤差を演算する工程と、該測定誤差に基づき前記測定位置を補正する工程と、補正した測定位置に基づき前記測定点の3次元座標を演算する工程とを有する測量方法。
【請求項10】
前記ポールの下端を所定の測定点に合致させた状態で、前記ポールを揺動させ、少なくとも3点で前記ターゲットを測定する工程と、各ターゲットの測定位置に基づき仮想の測定点の3次元座標を演算する工程と、前記ターゲットの測定位置と前記仮想の測定点とに基づき前記M-Pベクトルを演算する工程とを更に有する請求項9に記載の測量方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、所望の測定点の3次元座標を測量可能な測量システム及び測量方法及び測量プログラムに関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
所望の測定点の測量を行う際には、一般的に再帰反射性を有するプリズム等を用いて測量が行われている。プリズムを用いるプリズム測量では、例えば、既知の位置にプリズムを設けたポールを測定点に設置し、気泡管等を介してプリズムが測定点の鉛直上に位置する様整準した後、トータルステーション等の測量装置によりプリズムを測定している。
【0003】
然し乍ら、複数の測定点でプリズム測量を行う場合、測定点を移動する毎に整準を行う必要がある為、測定に時間を要し、作業性が悪い。
【0004】
又、部屋の角を測定点とする場合等、ポールを鉛直に整準できない。プリズムを測定点の鉛直上に設置できない場合には、プリズムを用いた測量が困難である。
【0005】
更に、ポールに傾斜角検出器を設け、傾斜角検出器によってポールの傾斜角を検出し、検出した傾斜角に基づき測定値を補正することで、部屋の角等を測定可能とする測量装置もある。然し乍ら、該測量装置は、どの方向に傾斜するかによって測定結果に誤差を生じる虞れがあった。
【先行技術文献】
【特許文献】
【0006】
特許第6721479号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、測定点の測定精度の向上を図る測量システム及び測量方法及び測量プログラムを提供するものである。
【課題を解決するための手段】
【0008】
本発明は、ポールと、該ポールの下端からの距離が既知であるターゲットとを有するターゲット装置と、前記ターゲットを測定可能な測量装置とを有する測量システムであって、前記ポールの下端を所定の測定点に合致させ、前記測量装置は該測量装置の器械中心と前記ターゲットの測定位置とを結ぶO-Mベクトルと、前記測定位置と前記測定点とを結ぶM-Pベクトルを演算し、該M-Pベクトルと直交し前記測定位置を通る平面と前記O-Mベクトルとのなす角度φを演算し、該角度φに基づき前記測定位置と前記ターゲットの光学中心との測定誤差を演算し、該測定誤差に基づき前記測定位置を補正し、補正した測定位置に基づき前記測定点の3次元座標を演算する様構成された測量システムに係るものである。
【0009】
又本発明は、前記ターゲット装置は、前記ポールの下端を所定の測定点に合致させた状態で、前記ポールを揺動させ、前記測量装置は少なくとも3点で前記ターゲットを測定し、各ターゲットの測定位置に基づき仮想の測定点の3次元座標を演算し、前記ターゲットの測定位置と前記仮想の測定点とに基づき前記M-Pベクトルを演算する様構成された測量システムに係るものである。
【0010】
又本発明は、前記ターゲット装置は傾斜センサを更に有し、前記測量装置は前記測定位置と前記傾斜センサが検出した前記ポールの姿勢に基づき前記M-Pベクトルを演算する様構成された測量システムに係るものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社トプコン
眼科装置
今日
株式会社トプコン
眼科装置
今日
株式会社トプコン
眼科システム
4日前
株式会社トプコン
眼科装置の制御方法及び眼科装置
今日
株式会社トプコン
測量装置、測量システム、測量方法及び測量プログラム
今日
株式会社トプコン
光コヒーレンストモグラフィ装置、その制御方法、及びプログラム
今日
株式会社トプコン
光コヒーレンストモグラフィ装置、その制御方法、及びプログラム
今日
個人
通電検査装置
5日前
個人
光フアィバー距離計測器
7日前
個人
光フアィバー距離計測器
7日前
日本精機株式会社
位置検出装置
1日前
個人
バッテリ用交流電流供給装置
7日前
株式会社ハシマ
検針機
4日前
東ソー株式会社
自動分析装置及び方法
1日前
DIC株式会社
測定装置
6日前
シスメックス株式会社
分析装置
11日前
富士電機株式会社
放射線検出器
6日前
株式会社ヨコオ
シートコンタクタ
1日前
株式会社タムラ製作所
電流検出器
11日前
スタンレー電気株式会社
車両前方視認装置
4日前
スタンレー電気株式会社
車両前方視認装置
4日前
ダイハツ工業株式会社
凹部の深さ測定方法
4日前
本田技研工業株式会社
物体検出装置
4日前
本田技研工業株式会社
物体検出装置
4日前
矢崎総業株式会社
電流センサ
5日前
日鉄テックスエンジ株式会社
情報処理装置
11日前
株式会社エイアンドティー
生体試料分析装置
11日前
愛知製鋼株式会社
測量方法及び測量システム
11日前
株式会社日本マイクロニクス
プローブ
11日前
セイコーエプソン株式会社
干渉計
1日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
6日前
アズビル株式会社
温度測定システムおよび方法
11日前
JRCモビリティ株式会社
充電用温度判定回路
1日前
株式会社JVCケンウッド
撮像装置及び測距方法
4日前
株式会社東芝
測距装置
11日前
内山工業株式会社
分析装置用部材
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ