TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040681
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023147622
出願日
2023-09-12
発明の名称
農作業機用制御システム
出願人
松山株式会社
代理人
弁理士法人第一国際特許事務所
主分類
A01B
35/04 20060101AFI20250317BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】トラクタに装着して農作業を行う作業機において、地表面の凹凸を的確に均すことができる農作業機用制御システムを提供することを目的とする。
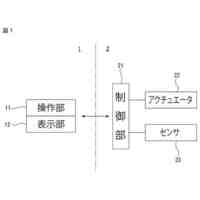
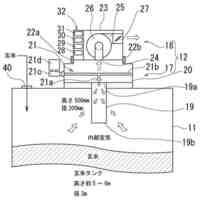
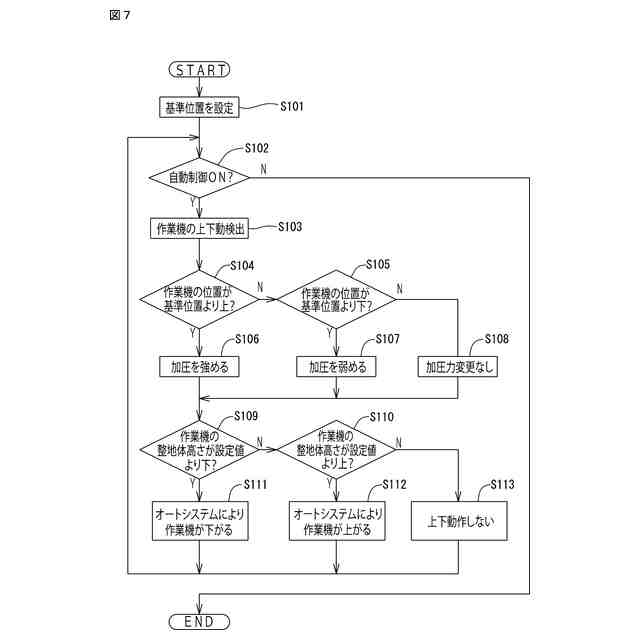
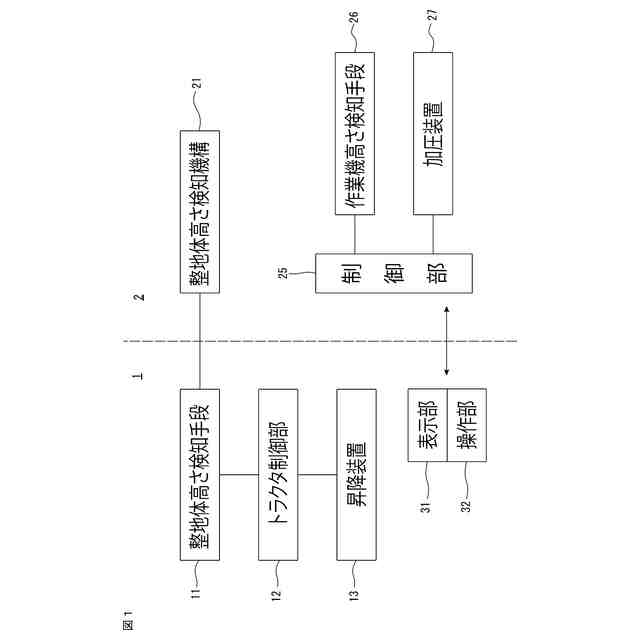
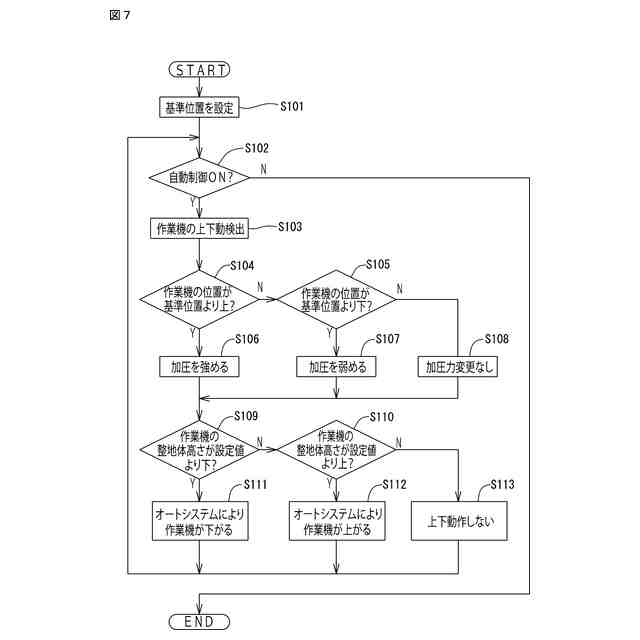
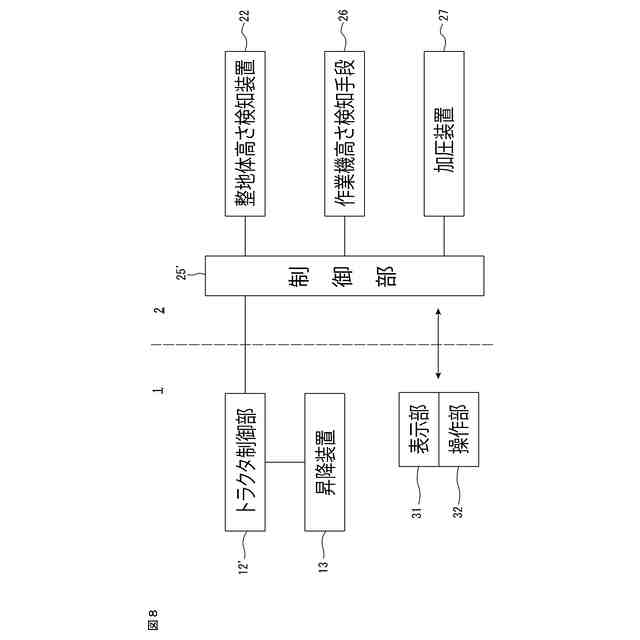
【解決手段】トラクタ1に装着して農作業を行う作業機2に適用する農作業機用制御システムにおいて、作業機2に備えられる制御部25と、作業機2に備えられ作業機の高さを検出するために必要な情報を取得可能な作業機高さ検知手段26と、作業機の地表面と接する部分を含む整地体に対する下方向の加圧を強めるか弱めるかを選択できる加圧装置27とを備え、制御部25は、作業機高さ検知手段26の情報に基づき、作業機2が基準高さよりも高いと判定した場合は加圧装置27の加圧を強め、作業機が基準高さよりも低いと判定した場合は加圧装置27の加圧を弱める制御を行う。
【選択図】図7
特許請求の範囲
【請求項1】
トラクタに装着して農作業を行う作業機に適用する農作業機用制御システムにおいて、
前記作業機に備えられる制御部と、前記作業機に備えられ前記作業機の高さを検出するために必要な情報を取得可能な作業機高さ検知手段と、前記作業機の地表面と接する部分を含む整地体に対する下方向の加圧を強めるか弱めるかを選択できる加圧装置とを備え、
前記制御部は、前記作業機高さ検知手段の情報に基づき、前記作業機が基準高さよりも高いと判定した場合は前記加圧装置の加圧を強め、前記作業機が基準高さよりも低いと判定した場合は前記加圧装置の加圧を弱める制御を行うことを特徴とする農作業機用制御システム。
続きを表示(約 2,100 文字)
【請求項2】
トラクタに装着して農作業を行う作業機に適用する農作業機用制御システムにおいて、
前記作業機に備えられる制御部と、前記作業機に備えられ前記作業機の高さを検出するために必要な情報を取得可能な作業機高さ検知手段と、前記作業機の地表面と接する部分を含む整地体に対する下方向の加圧を強めるか弱めるかを選択できる加圧装置と、前記制御部と通信が可能な表示部とを備え、
前記制御部は、前記作業機高さ検知手段の情報に基づき、前記作業機が基準高さよりも高いと判定した場合は、前記加圧装置の加圧を強める情報を前記表示部に送信し、前記表示部は、前記制御部からの前記加圧装置の加圧を強める情報に基づき、前記加圧装置の加圧を強める操作を行うことの情報を表示し、
前記制御部は、前記作業機高さ検知手段の情報に基づき、前記作業機が基準高さよりも低いと判定した場合は前記加圧装置の加圧を弱める情報を前記表示部に送信し、前記表示部は、前記制御部からの前記加圧装置の加圧を弱める情報に基づき、前記加圧装置の加圧を弱める操作を行うことの情報を表示することを特徴とする農作業機用制御システム。
【請求項3】
請求項2に記載の農作業機用制御システムにおいて、
前記制御部と通信が可能な操作部を備え、前記操作部は前記加圧装置の加圧の強さを変更するためのスイッチを備え、前記制御部は、前記操作部から加圧の強さを変更するスイッチの操作情報を受信して前記加圧装置の加圧の強さを変更することを特徴とする農作業機用制御システム。
【請求項4】
請求項1又は請求項2に記載の農作業機用制御システムにおいて、
前記加圧装置は、前記作業機の耕耘部の上側に備える耕耘部カバーから前記整地体を下方向に付勢可能な付勢手段と、アクチュエータと、を備え、前記アクチュエータの作動により、前記整地体を前記付勢手段を介して下方向に加圧する加圧状態か、前記整地体を加圧しないフリー状態かを選択可能であることを特徴とする農作業機用制御システム。
【請求項5】
請求項4に記載の農作業機用制御システムにおいて、
前記加圧装置は、前記アクチュエータの作動により回動する回動体を備え、前記回動体は前記付勢手段の一端が接続される長孔部を有し、
前記加圧状態では、前記付勢手段の一端が前記長孔部の端部に位置し、前記フリー状態では、前記付勢手段の一端が前記長孔部の途中に位置することを特徴とする農作業機用制御システム。
【請求項6】
請求項1又は請求項2に記載の農作業機用制御システムにおいて、
前記作業機に備える整地体高さ検知機構と、前記トラクタに備える整地体高さ検知手段と、前記トラクタに備えるトラクタ制御部と、前記作業機の高さを変更可能な昇降装置とを備え、
前記整地体高さ検知機構は、前記作業機の耕耘部の上側に備える耕耘部カバーに対する前記整地体の高さの変化を部材の位置の変化に変換し、
前記整地体高さ検知手段は、前記部材の位置の変化の情報を取得し、
前記トラクタ制御部は、前記整地体高さ検知手段の情報に基づき、前記耕耘部カバーに対する前記整地体の高さが一定になるように前記昇降装置を介して前記作業機の高さを変更する制御を行うことを特徴とする農作業機用制御システム。
【請求項7】
請求項1又は請求項2に記載の農作業機用制御システムにおいて、
前記作業機に備える整地体高さ検知装置と、前記トラクタに備え前記制御部と通信可能なトラクタ制御部と、前記作業機の高さを変更可能な昇降装置とを備え、
前記整地体高さ検知装置は、前記作業機の耕耘部の上側に備える耕耘部カバーに対する前記整地体の高さを検出するために必要な情報を取得し、
前記制御部は、前記整地体高さ検知装置の情報に基づき、前記耕耘部カバーに対する前記整地体の高さが一定になるように前記作業機の高さを変更する信号を前記トラクタ制御部に送信し、
前記トラクタ制御部は、前記制御部からの前記作業機の高さを変更する信号に基づき、前記昇降装置を介して前記作業機の高さを変更する制御を行うことを特徴とする農作業機用制御システム。
【請求項8】
請求項1又は請求項2に記載の農作業機用制御システムにおいて、
前記作業機に備える整地体高さ検知装置と、前記制御部と通信が可能な表示部とを備え、
前記整地体高さ検知装置は、前記作業機の耕耘部の上側に備える耕耘部カバーに対する前記整地体の高さを検出するために必要な情報を取得し、
前記制御部は、前記整地体高さ検知装置の情報に基づき、前記耕耘部カバーに対する前記整地体の高さが一定になるように前記作業機の高さを変更する情報を前記表示部に送信し、
前記表示部は、前記制御部からの前記作業機の高さを変更する情報に基づき、前記作業機の高さを変更する操作を行うことの情報を表示することを特徴とする農作業機用制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農作業機用制御システムに関し、特に、トラクタに装着して農作業を行う作業機の作業深さを制御する農作業機用制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
トラクタに装着する作業機で農作業を行う場合、例えば代掻きや耕耘作業においては、地表面の凹凸に追従して作業機が上下動することが多い。また、作業機にはオート装置が付属している場合がある。
【0003】
また、特許文献1には、代かき作業機を昇降させる必要がない場面において、オート装置が代かき作業機を昇降させることを防止する機能を有する農作業機が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2016-208844号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来のように、トラクタに装着する作業機で農作業を行うと、圃場のもともとの地表面の凹凸に追従して農作業が行われるため、地表面の凹凸を均すことができない場合が存在する。また、オート装置を用いても、整地体の位置がもともとの地表面の凹凸に沿って上下動すると、耕耘深さもそれに応じた動きになり、地表面の凹凸を均すことができない場合が存在する。
【0006】
また、特許文献1では、エプロンをロック状態かフリー状態にすることができるが、その状態を変更するためには、作業者がその都度、操作をする必要がある。このため、当該操作を行うためには、作業者は常に圃場の状態を確認しておく必要が生じる。また、操作のタイミングがずれると適切な作業ができないこととなる。
【0007】
本発明は、上記課題に鑑みて、トラクタに装着して農作業を行う作業機において、地表面の凹凸を的確に均すことができる農作業機用制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、代表的な本発明の農作業機用制御システムの一つは、トラクタに装着して農作業を行う作業機に適用する農作業機用制御システムにおいて、前記作業機に備えられる制御部と、前記作業機に備えられ前記作業機の高さを検出するために必要な情報を取得可能な作業機高さ検知手段と、前記作業機の地表面と接する部分を含む整地体に対する下方向の加圧を強めるか弱めるかを選択できる加圧装置とを備え、前記制御部は、前記作業機高さ検知手段の情報に基づき、前記作業機が基準高さよりも高いと判定した場合は前記加圧装置の加圧を強め、前記作業機が基準高さよりも低いと判定した場合は前記加圧装置の加圧を弱める制御を行うことを特徴とする。
【発明の効果】
【0009】
本発明によれば、トラクタに装着して農作業を行う作業機において、地表面の凹凸を的確に均すことができる。
上記以外の課題、構成及び効果は、以下の実施形態により明らかにされる。
【図面の簡単な説明】
【0010】
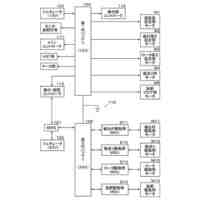
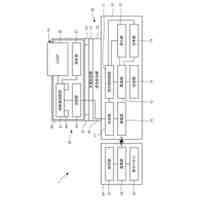
本発明の第1の実施形態の農作業機用制御システムのブロック図である。
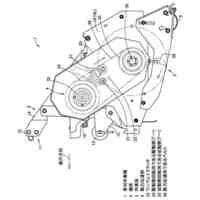
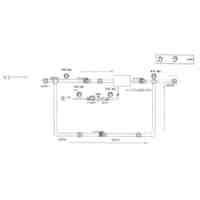
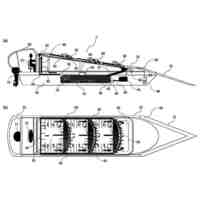
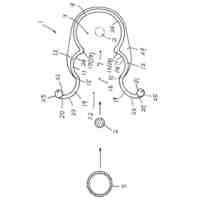
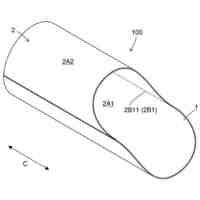
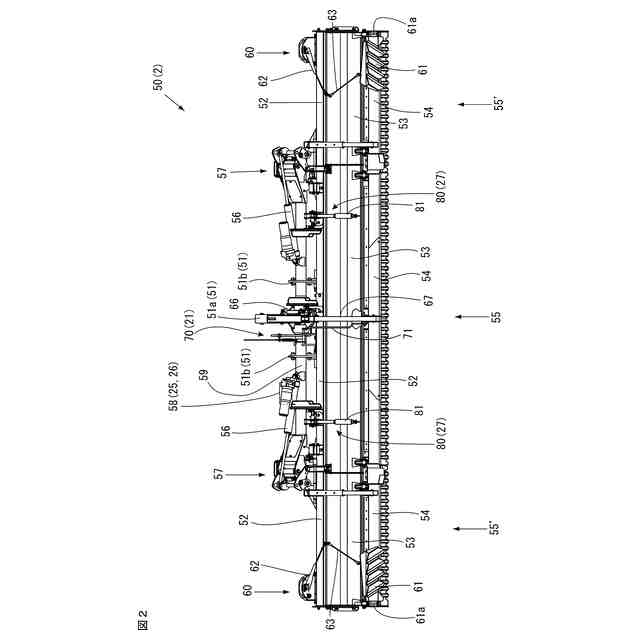
本発明の第1の実施形態に適用可能な作業機を示す背面図である。
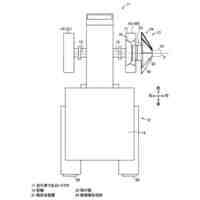
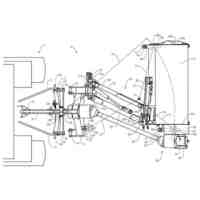
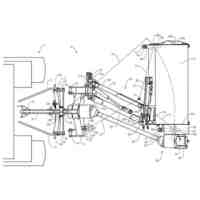
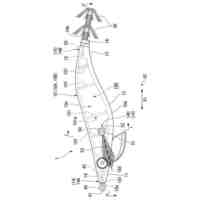
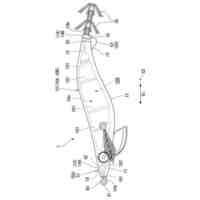
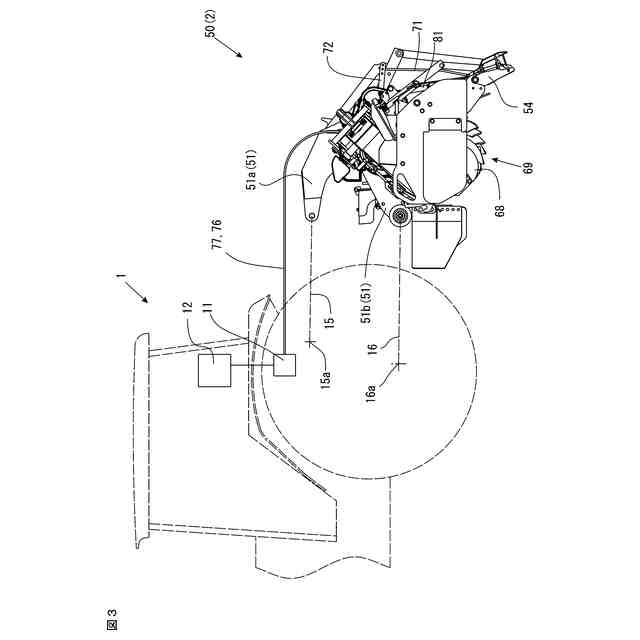
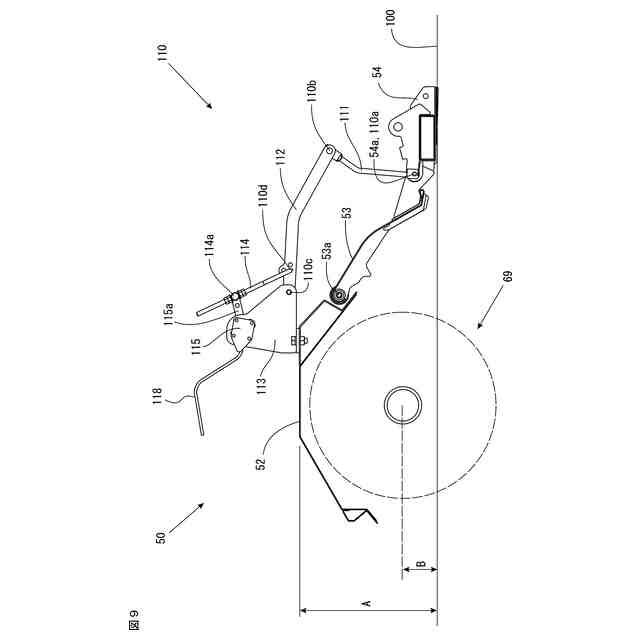
本発明の第1の実施形態に適用可能なトラクタに装着した作業機を示す側面図である。
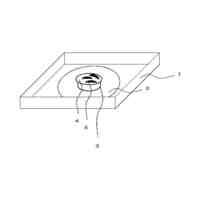
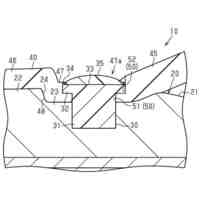
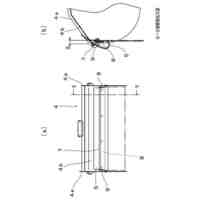
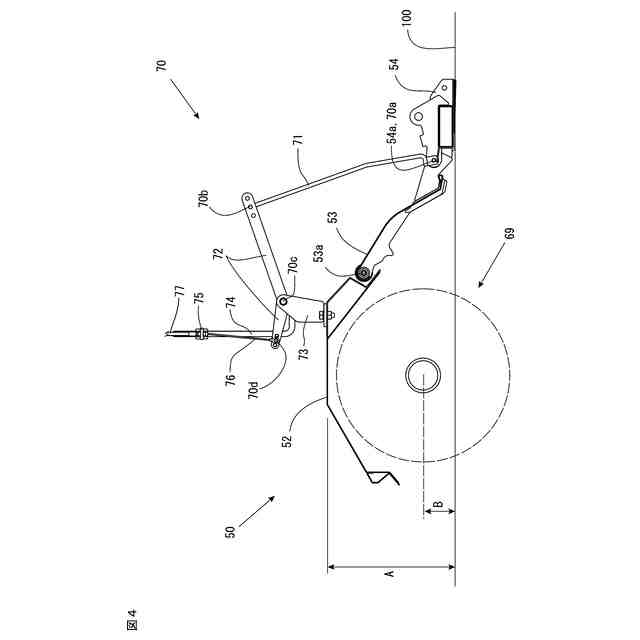
本発明の第1の実施形態に適用可能な整地体高さ検知機構の側面図である。
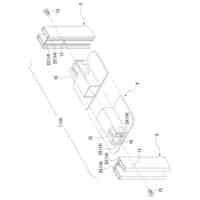
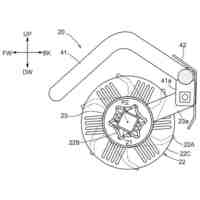
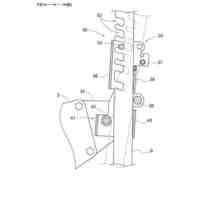
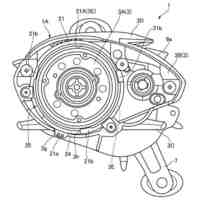
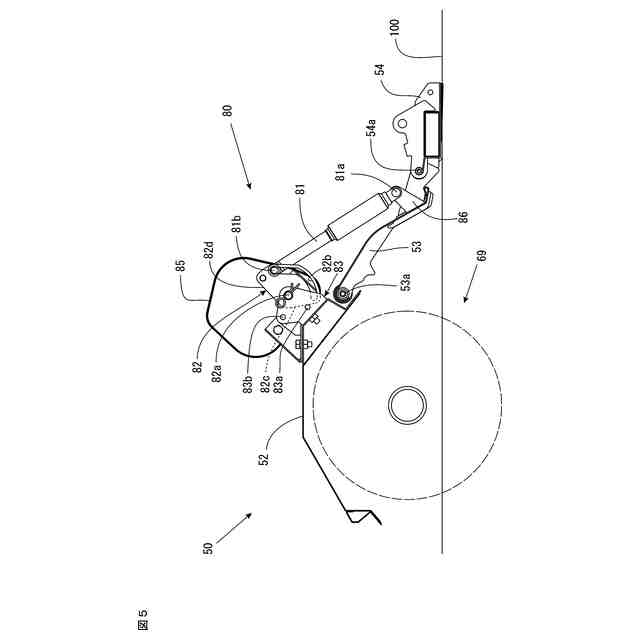
本発明の第1の実施形態に適用可能な加圧装置の側面図である。
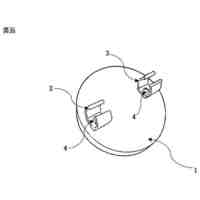
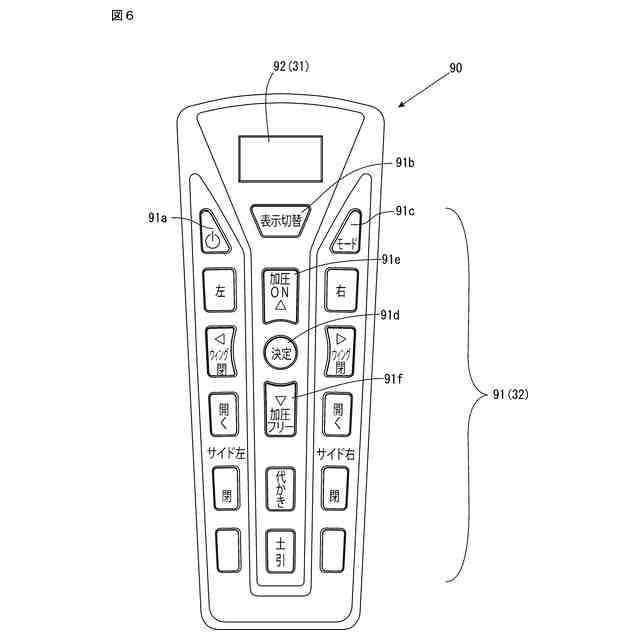
本発明の第1の実施形態に適用可能なリモコン装置を示す図である。
本発明の第1の実施形態の農作業機用制御システムのフローチャートである。
本発明の第2の実施形態の農作業機用制御システムのブロック図である。
本発明の第2の実施形態に適用可能な整地体高さ検知装置の側面図である。
本発明の第2の実施形態の農作業機用制御システムのフローチャートである。
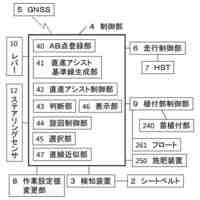
本発明の第3の実施形態の農作業機用制御システムのブロック図である。
本発明の第3の実施形態の農作業機用制御システムのフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
松山株式会社
草刈作業機
13日前
松山株式会社
農作業機用制御システム
13日前
松山株式会社
畦形成装置及び畦形成システム
1か月前
松山株式会社
農作業機
13日前
井関農機株式会社
作業車両
2日前
有限会社小林工業
エビ養殖設備
22日前
株式会社猫壱
首輪
21日前
井関農機株式会社
作業車両
21日前
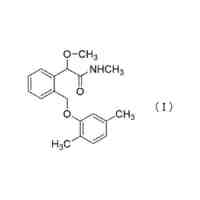
住友化学株式会社
植物病害防除方法
2日前
株式会社ダイイチ
海苔網の酸処理船
13日前
松山株式会社
草刈作業機
13日前
池田食研株式会社
腹足類の駆除忌避剤
13日前
株式会社サタケ
穀物タンクの換気装置
14日前
平岡織染株式会社
防虫間仕切りシート
20日前
ニシム電子工業株式会社
散布装置
13日前
株式会社ササキコーポレーション
農作業機
13日前
株式会社ササキコーポレーション
農作業機
13日前
株式会社ササキコーポレーション
農作業機
13日前
株式会社 ジークラック
ルアー
15日前
第一ビニール株式会社
栽培容器載置台
28日前
アルインコ株式会社
苗箱収納棚
1日前
第一ビニール株式会社
植物の茎保持具
28日前
株式会社クボタ
水田作業機
6日前
株式会社クボタ
水田作業機
6日前
株式会社アテックス
草刈機の弾性カバー保持機構
13日前
株式会社シマノ
ルアー
21日前
株式会社シマノ
ルアー
21日前
IWKイノベーション株式会社
止まり木ステップ
21日前
株式会社サニカ
液体散布装置
2日前
株式会社クボタ
歩行型作業機
13日前
個人
防虫袋体及び苗の植え付け方法
15日前
株式会社ナリス化粧品
油中水型肉球保護用組成物
3日前
株式会社やまびこ
機能追加装置
23日前
グローブライド株式会社
両軸受リール
6日前
個人
スコップ
1日前
OTIS株式会社
ルアー用絡み防止キャップ
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ