TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035434
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142471
出願日
2023-09-01
発明の名称
制御装置及び制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B63H
25/04 20060101AFI20250306BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】船舶の着岸制御に関する技術を改善する。
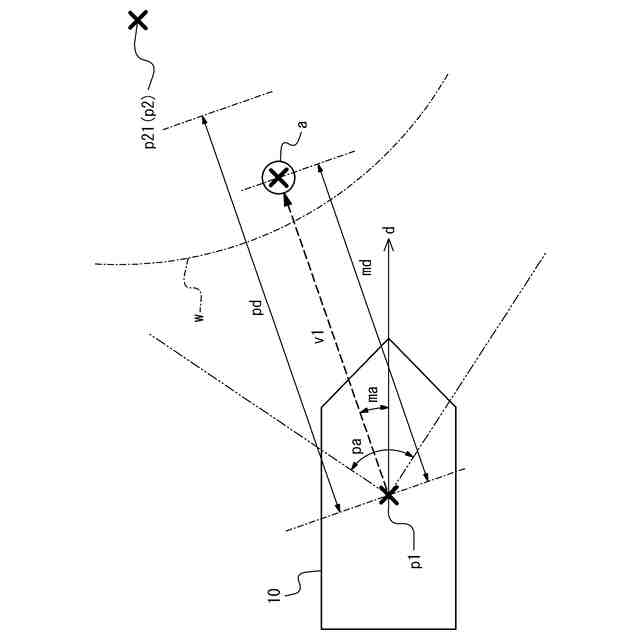
【解決手段】制御装置20は、船舶10が、目標着岸地点への自動操縦を開始可能な水域の範囲外に位置しているときに、当該水域の範囲内に第1の中間目標地点を設定し、船舶10の位置と、第1の中間目標地点とを結ぶベクトルの距離、及び船舶10の船首方向と当該ベクトルの方向との間の角度が、所定の基準を満たしている場合、船舶10の位置から、設定された第1の中間目標地点を経由して目標着岸地点に至る、船舶10が航行する航路を策定し、策定された航路に従って、船舶10を自動操縦する制御部25を備える。
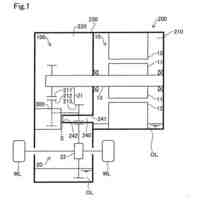
【選択図】図1
特許請求の範囲
【請求項1】
船舶を自動操縦する制御装置であって、
前記船舶が、目標着岸地点への自動操縦を開始可能な水域の範囲外に位置しているときに、当該水域の範囲内に第1の中間目標地点を設定し、前記船舶の位置と、前記第1の中間目標地点とを結ぶベクトルの距離、及び前記船舶の船首方向と前記ベクトルの方向との間の角度が、所定の基準を満たしている場合、前記船舶の位置から、設定された前記第1の中間目標地点を経由して前記目標着岸地点に至る、前記船舶が航行する航路を策定し、策定された前記航路に従って、前記船舶を自動操縦する制御部を備える、制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記制御部は、前記船舶の位置と、前記第1の中間目標地点との間の水域に障害物が検知されるときに、当該水域に、前記船舶が前記障害物を迂回して航行するための第2の中間目標地点を設定し、
前記第2の中間目標地点は、前記船舶の位置と、前記第2の中間目標地点との間、及び前記第2の中間目標地点と、前記第1の中間目標地点との間で、それぞれ前記所定の基準を満たすように設定される、制御装置。
【請求項3】
請求項1に記載の制御装置であって、
前記制御部は、前記船舶の位置と前記第1の中間目標地点とを結ぶベクトルの距離、又は前記船舶の船首方向と前記ベクトルの方向との間の角度が、前記所定の基準を満たさない場合、前記船舶の位置と、前記第1の中間目標地点との間の水域に、第2の中間目標地点を設定し、
前記第2の中間目標地点は、前記船舶の位置と、前記第2の中間目標地点との間、及び前記第2の中間目標地点と、前記第1の中間目標地点との間で、それぞれ前記所定の基準を満たすように設定される、制御装置。
【請求項4】
請求項2又は3に記載の制御装置であって、
前記制御部は、前記船舶の位置と、前記第1の中間目標地点との間の水域に、2つ以上の第2の中間目標地点が設定される場合、前記2つ以上の第2の中間目標地点のそれぞれへの、前記船舶の到達順序の選択を受付け、前記船舶の位置と、前記到達順序が設定された前記2つ以上の第2の中間目標地点のそれぞれと、前記第1の中間目標地点と、前記目標着岸地点とを関連付けて、前記航路を策定する、制御装置。
【請求項5】
船舶を自動操縦する制御装置が実行する制御方法であって、
前記制御装置により、
前記船舶が、目標着岸地点への自動操縦を開始可能な水域の範囲外に位置しているときに、当該水域の範囲内に第1の中間目標地点を設定することと、
前記船舶の位置と、前記第1の中間目標地点とを結ぶベクトルの距離、及び前記船舶の船首方向と前記ベクトルの方向との間の角度が、所定の基準を満たしている場合、前記船舶の位置から、設定された前記第1の中間目標地点を経由して前記目標着岸地点に至る、前記船舶が航行する航路を策定することと、
策定された前記航路に従って、前記船舶を自動操縦することと、
を実行する、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置及び制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、船舶の着岸制御に関する技術が知られている。例えば特許文献1には、船舶の着岸動作を支援する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-40470号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
船舶の着岸制御は、安全性の観点から、船舶の位置する地点が目標着岸地点に対して適切な距離及び方位の範囲内に無い場合、又は船舶の位置する地点と、目標着岸地点との間に障害物がある場合には開始できない。したがって、利便性及び安全性の観点から、船舶の着岸制御に関する技術には改善の余地があった。
【0005】
かかる事情に鑑みてなされた本開示の目的は、船舶の着岸制御に関する技術を改善することにある。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る制御装置は、船舶を自動操縦する制御装置であって、前記船舶が、目標着岸地点への自動操縦を開始可能な水域の範囲外に位置しているときに、当該水域の範囲内に第1の中間目標地点を設定し、前記船舶の位置と、前記第1の中間目標地点とを結ぶベクトルの距離、及び前記船舶の船首方向と前記ベクトルの方向との間の角度が、所定の基準を満たしている場合、前記船舶の位置から、設定された前記第1の中間目標地点を経由して前記目標着岸地点に至る、前記船舶が航行する航路を策定し、策定された前記航路に従って、前記船舶を自動操縦する制御部を備える。
【0007】
本開示の一実施形態に係る制御方法は、船舶を自動操縦する制御装置が実行する制御方法であって、前記制御装置により、前記船舶が、目標着岸地点への自動操縦を開始可能な水域の範囲外に位置しているときに、当該水域の範囲内に第1の中間目標地点を設定することと、前記船舶の位置と、前記第1の中間目標地点とを結ぶベクトルの距離、及び前記船舶の船首方向と前記ベクトルの方向との間の角度が、所定の基準を満たしている場合、前記船舶の位置から、設定された前記第1の中間目標地点を経由して前記目標着岸地点に至る、前記船舶が航行する航路を策定することと、策定された前記航路に従って、前記船舶を自動操縦することと、を実行する。
【発明の効果】
【0008】
本開示の一実施形態によれば、船舶の着岸制御に関する技術が改善される。
【図面の簡単な説明】
【0009】
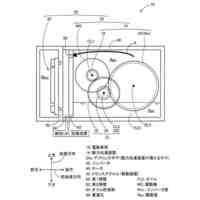
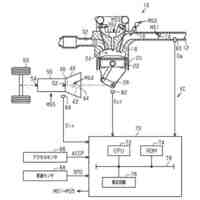
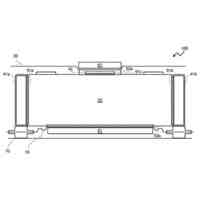
本開示の一実施形態に係るシステムの概略構成例を示すブロック図である。
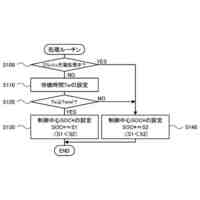
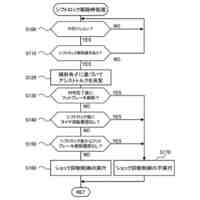
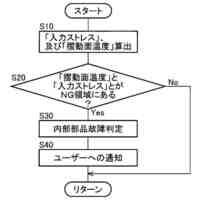
制御装置の動作例を示すフローチャートである。
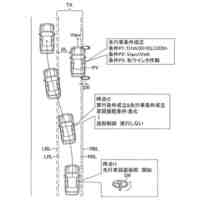
船舶が航行する航路の一例を示す概略図である。
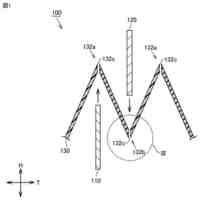
第1の中間目標地点の設定例を示す概略図である。
第2の中間目標地点の設定例を示す概略図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
燃焼器
1日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
ロータ
1日前
トヨタ自動車株式会社
ロータ
1日前
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
収容ケース
今日
トヨタ自動車株式会社
車両制御装置
今日
トヨタ自動車株式会社
電極積層装置
今日
トヨタ自動車株式会社
乗降支援装置
今日
トヨタ自動車株式会社
車載空調装置
今日
トヨタ自動車株式会社
異物除去装置
1日前
トヨタ自動車株式会社
エンジン装置
1日前
トヨタ自動車株式会社
動力伝達装置
今日
トヨタ自動車株式会社
車両の制御装置
1日前
トヨタ自動車株式会社
ハイブリッド車
今日
トヨタ自動車株式会社
電極の製造方法
今日
トヨタ自動車株式会社
モデル生成方法
今日
トヨタ自動車株式会社
蓄電モジュール
今日
トヨタ自動車株式会社
車両の制御装置
今日
トヨタ自動車株式会社
排ガス浄化装置
今日
トヨタ自動車株式会社
車載用制御装置
1日前
トヨタ自動車株式会社
車両の制御装置
今日
トヨタ自動車株式会社
ハイブリッド車
1日前
トヨタ自動車株式会社
バッテリパック
今日
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ