TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031902
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2024228181,2020123171
出願日
2024-12-25,2020-07-17
発明の名称
画像処理方法、プログラム、画像処理装置、学習済みモデルの製造方法、および、画像処理システム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
3/06 20060101AFI20250228BHJP(測定;試験)
要約
【課題】機械学習モデルの学習負荷と保持データ量を抑制して、撮像画像のデフォーカスぼけから高精度に距離情報を推定することが可能な画像処理方法を提供する。
【解決手段】画像処理方法は、撮像画像と、撮像画像の撮像に用いた光学系の状態に関する情報とを含む入力データを取得する工程と、入力データを機械学習モデルに入力し、撮像画像の距離情報を推定する工程とを有し、光学系の状態に関する情報は、焦点距離、絞り値、またはフォーカス距離の少なくとも一つを含む。
【選択図】図1
特許請求の範囲
【請求項1】
撮像画像と、前記撮像画像の撮像に用いた光学系の状態に関する情報と、を含む入力データを取得する工程と、
前記入力データを機械学習モデルに入力し、前記撮像画像の距離情報を推定する工程と、を有し、
前記光学系の状態に関する情報は、焦点距離、絞り値、またはフォーカス距離の少なくとも一つを含むことを特徴とする画像処理方法。
続きを表示(約 910 文字)
【請求項2】
前記距離情報の一部の領域を推定するために前記機械学習モデルが用いる前記撮像画像の領域は、前記機械学習モデルに入力される前記撮像画像の全体よりも小さいことを特徴とする請求項1に記載の画像処理方法。
【請求項3】
前記光学系の状態に関する情報は、前記光学系の焦点距離、絞り値、またはフォーカス距離の少なくとも一つを示す数値を含み、
前記数値は、正規化されていることを特徴とする請求項1または2に記載の画像処理方法。
【請求項4】
前記入力データは、前記光学系の状態を示すステートマップを含み、
前記ステートマップは、前記撮像画像の画素数と、前記光学系の状態に関する情報と、に基づいて生成されることを特徴とする請求項1乃至3のいずれか一項に記載の画像処理方法。
【請求項5】
前記ステートマップは、前記光学系の前記焦点距離、前記絞り値、または前記フォーカス距離の少なくとも二つを示す数値をそれぞれ異なるチャンネルの要素として有することを特徴とする請求項4に記載の画像処理方法。
【請求項6】
前記ステートマップにおける同一のチャンネルの要素は、互いに同一の数値を有することを特徴とする請求項4または5に記載の画像処理方法。
【請求項7】
前記入力データは、前記撮像画像の各画素の位置に関する情報を更に有することを特徴とする請求項1乃至6のいずれか一項に記載の画像処理方法。
【請求項8】
前記位置に関する情報は、前記光学系のイメージサークルに基づく長さに基づいて正規化された数値を有することを特徴とする請求項7に記載の画像処理方法。
【請求項9】
前記入力データは、前記撮像画像の撮像に用いた撮像素子の画素ピッチに関する情報を更に有することを特徴とする請求項1乃至8のいずれか一項に記載の画像処理方法。
【請求項10】
請求項1乃至9のいずれか一項に記載の画像処理方法をコンピュータに実行させることを特徴とするプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、光学系を用いて撮像された撮像画像から、距離情報を推定する画像処理方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
非特許文献1には、単一の光学系を用いて撮像された撮像画像のデフォーカスぼけから、機械学習モデルを用いて距離情報を推定する方法が開示されている。
【先行技術文献】
【非特許文献】
【0003】
Physical Cue based Depth-Sensing by Color Coding with Deaberration Network,https://arxiv.org/abs/1908.00329
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に開示された方法は、様々な収差が発生する光学系で撮像した撮像画像から距離情報を推定する場合、推定の精度低下、または学習負荷と保持データ量の増大を招く。光学系では、焦点距離、絞り値、およびフォーカス距離などにより、デフォーカスぼけが変化する。このため、デフォーカスぼけから距離情報を推定するには、以下の2つの方法が考えられる。
【0005】
第1の方法は、光学系で発生し得るデフォーカスぼけ全てを含む学習データで、機械学習モデルを学習する方法である。しかし、学習データに似たような形状のデフォーカスぼけが複数含まれている場合、各々のデフォーカスぼけに対する距離情報の推定精度は低下する。第2の方法は、光学系で発生し得るデフォーカスぼけを各々、類似する複数のグループに分け、各グループの学習データで個別に機械学習モデルを学習する方法である。しかしこの場合、高倍率なズームレンズなどの様々な収差が発生する光学系では、グループ数が膨大になり、学習負荷と保持データ量(学習した機械学習モデルのウエイトを示すデータの容量)が増大する。このため、距離情報の推定精度と、学習負荷および保持データ量とを両立させることは困難である。
【0006】
そこで本発明の目的は、機械学習モデルの学習負荷と保持データ量を抑制して、撮像画像のデフォーカスぼけから高精度に距離情報を推定することが可能な画像処理方法などを提供することである。
【課題を解決するための手段】
【0007】
本発明の一側面としての画像処理方法は、撮像画像と、前記撮像画像の撮像に用いた光学系の状態に関する情報とを含む入力データを取得する工程と、前記入力データを機械学習モデルに入力し、前記撮像画像の距離情報を推定する工程とを有し、前記光学系の状態に関する情報は、焦点距離、絞り値、またはフォーカス距離の少なくとも一つを含む。
【0008】
本発明の他の目的及び特徴は、以下の実施例において説明される。
【発明の効果】
【0009】
本発明によれば、機械学習モデルの学習負荷と保持データ量を抑制して、撮像画像のデフォーカスぼけから高精度に距離情報を推定することが可能な画像処理方法などを提供することができる。
【図面の簡単な説明】
【0010】
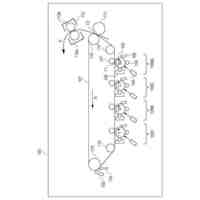
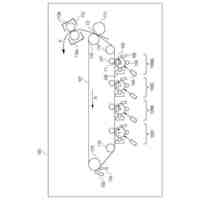
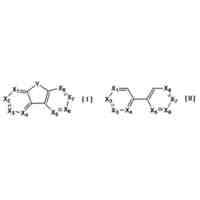
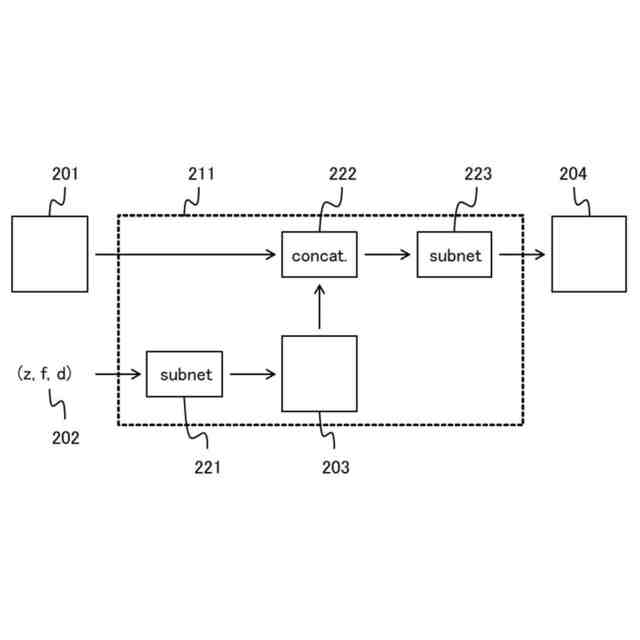
実施例1における機械学習モデルの構成を示す図である。
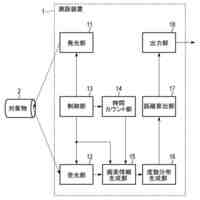
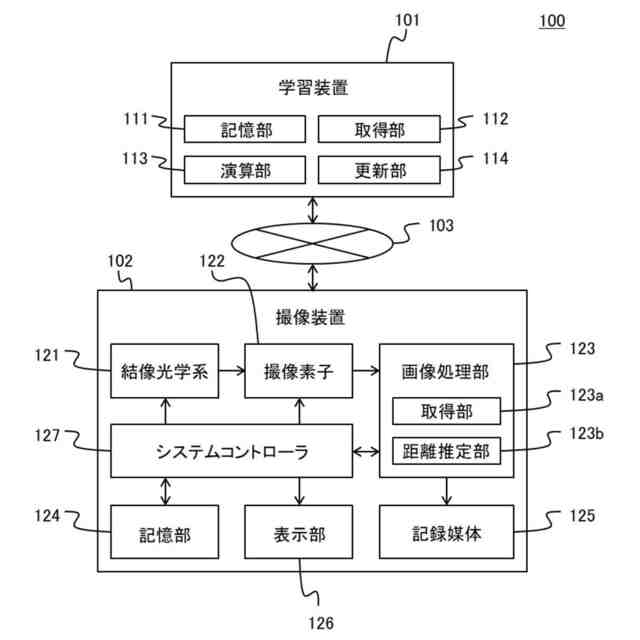
実施例1における画像処理システムのブロック図である。
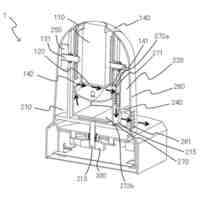
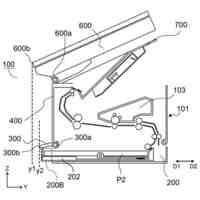
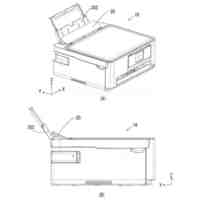
実施例1における画像処理システムの外観図である。
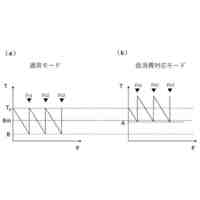
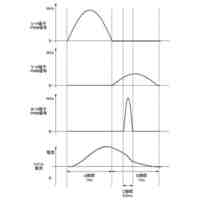
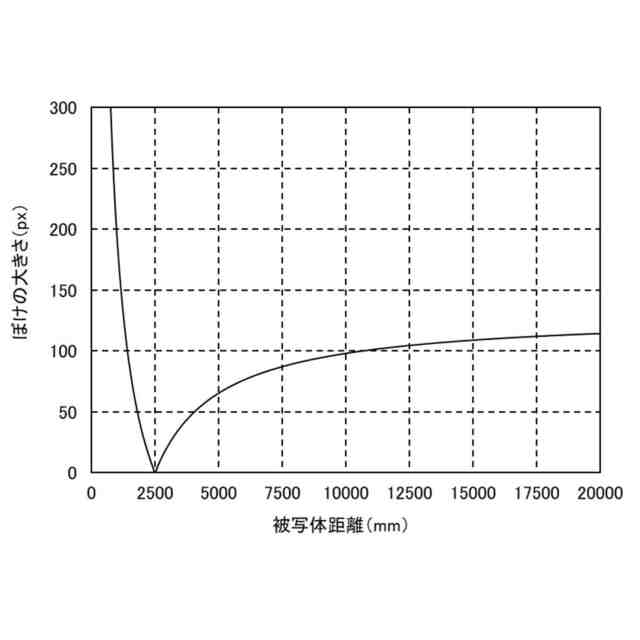
実施例1におけるデフォーカスぼけの大きさと被写体距離との関係を示す図である。
実施例1におけるデフォーカス位置での点像強度分布を示す図である。
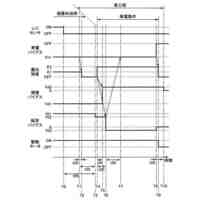
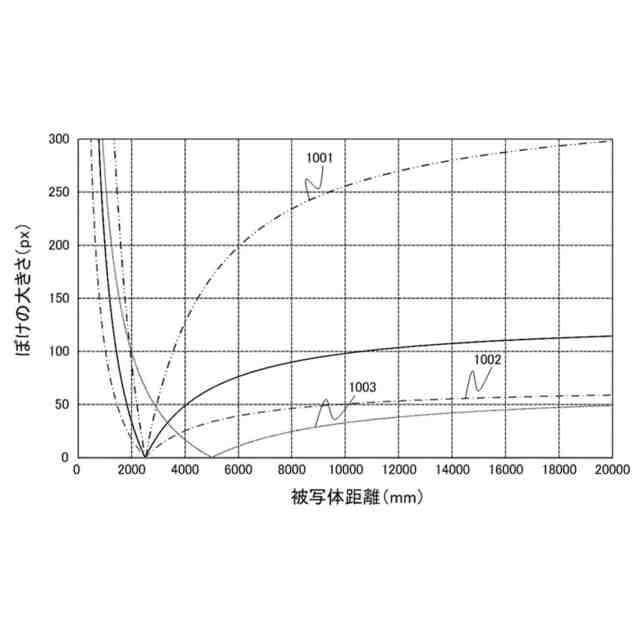
実施例1におけるレンズステートを変化させたときのデフォーカスぼけの大きさと被写体距離との関係を示す図である。
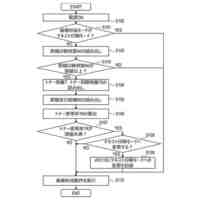
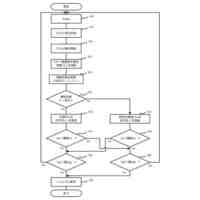
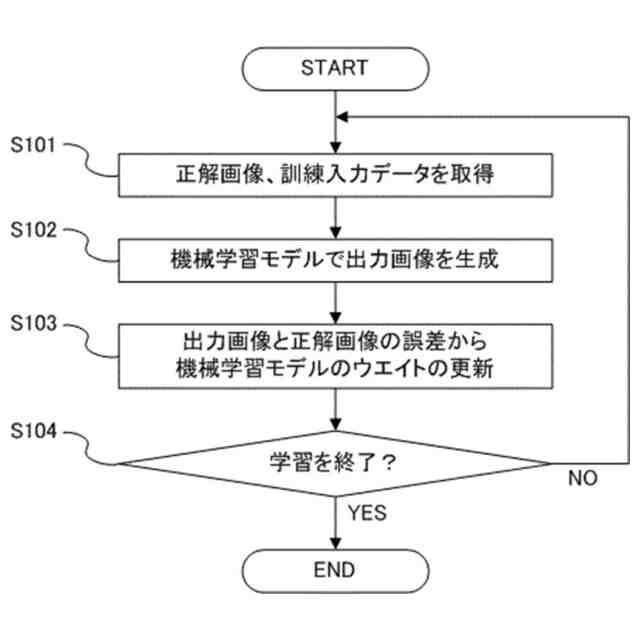
実施例1乃至3におけるウエイトの学習に関するフローチャートである。
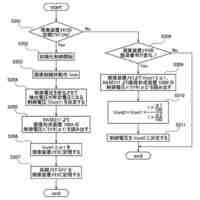
実施例1における推定画像の生成に関するフローチャートである。
実施例2における機械学習モデルの構成を示す図である。
実施例2における画像処理システムのブロック図である。
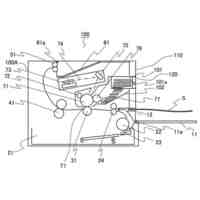
実施例2における画像処理システムの外観図である。
実施例2における撮像素子と光学系のイメージサークルとの関係を示す図である。
実施例2における推定画像の生成に関するフローチャートである。
実施例3における画像処理システムのブロック図である。
実施例3における画像処理システムの外観図である。
実施例3における推定画像の生成に関するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
現像装置
2日前
キヤノン株式会社
撮像装置
17日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
測距装置
17日前
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
半導体装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像読取装置
2日前
キヤノン株式会社
印刷システム
2日前
キヤノン株式会社
画像処理装置
2日前
キヤノン株式会社
情報処理装置
10日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
液体吐出装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像表示装置
16日前
キヤノン株式会社
有機発光素子
16日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
カートリッジ
2日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
液体吐出ヘッド
2日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ