TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025030491
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023135835
出願日
2023-08-23
発明の名称
処理システム、処理方法、プログラム、及び記憶媒体
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
G06T
7/20 20170101AFI20250228BHJP(計算;計数)
要約
【課題】作業をより精度良く推定可能な、処理システム、処理方法、プログラム、及び記憶媒体を提供する。
【解決手段】実施形態に係る処理システムは、作業者及び物品が写る第1画像から、前記作業者の姿勢を推定する。前記処理システムは、前記第1画像から、前記物品の状態と、前記作業者による前記物品への作業箇所と、から選択される1つ以上を推定する。前記処理システムは、前記状態及び前記作業箇所から選択される前記1つ以上と、前記姿勢と、に基づいて、複数のノード及び複数のエッジを含む第1グラフデータを生成する。前記処理システムは、グラフニューラルネットワーク(GNN)を含むニューラルネットワークに前記第1グラフデータを入力する。前記処理システムは、前記ニューラルネットワークから出力された結果を用いて、前記作業者によって実行されている作業を推定する。
【選択図】図1
特許請求の範囲
【請求項1】
作業者及び物品が写る第1画像から、前記作業者の姿勢を推定し、
前記第1画像から、前記物品の状態と、前記作業者による前記物品への作業箇所と、から選択される1つ以上を推定し、
前記状態及び前記作業箇所から選択される前記1つ以上と、前記姿勢と、に基づいて、複数のノード及び複数のエッジを含む第1グラフデータを生成し、
グラフニューラルネットワーク(GNN)を含むニューラルネットワークに前記第1グラフデータを入力し、前記ニューラルネットワークから出力された結果を用いて、前記作業者によって実行されている作業を推定する、処理システム。
続きを表示(約 1,700 文字)
【請求項2】
前記第1画像からは、前記状態が推定され、
前記第1グラフデータは、前記作業者の複数の関節にそれぞれ対応する複数の第1ノードと、前記作業者の複数の骨格にそれぞれ対応する複数の第1エッジと、前記物品が取り得る複数の前記状態にそれぞれ対応する複数の第2ノードとを含む、請求項1に記載の処理システム。
【請求項3】
前記第1グラフデータにおいて、前記複数の第2ノードのそれぞれは、前記複数の第1ノードのいずれかとエッジによって接続される、請求項2に記載の処理システム。
【請求項4】
前記第1グラフデータは、
前記複数の第1ノード及び前記複数の第1エッジを含む第1データと、
前記複数の第2ノード及びそれぞれが前記第2ノード同士の関連性を示す複数の第2エッジを含み、前記第1データとは分離された第2データと、
を含み、
前記第1データ及び前記第2データが、前記ニューラルネットワークに入力される、請求項2に記載の処理システム。
【請求項5】
前記GNNは、第1GNN及び第2GNNを含み、
前記ニューラルネットワークにおいて、前記第1データが前記第1GNNに入力され、前記第1GNNから出力された結果と、前記第2データが前記第2GNNに入力され、前記第2GNNから出力された結果と、が全結合層に入力され、
前記全結合層から出力された結果を用いて、前記作業を推定する、請求項4に記載の処理システム。
【請求項6】
前記第1画像から、前記作業箇所が推定され、
前記第1グラフデータは、前記作業者の複数の関節にそれぞれ対応する複数の第1ノードと、前記作業者の複数の骨格にそれぞれ対応する複数の第1エッジと、前記物品の複数の箇所にそれぞれ対応する複数の第3ノードとを含む、請求項1に記載の処理システム。
【請求項7】
前記第1画像からは、前記状態及び前記作業箇所の両方が推定され、
前記第1グラフデータは、前記作業者の複数の関節にそれぞれ対応する複数の第1ノードと、前記作業者の複数の骨格にそれぞれ対応する複数の第1エッジと、前記物品が取り得る複数の前記状態にそれぞれ対応する複数の第2ノードと、前記物品の複数の箇所にそれぞれ対応する複数の第3ノードとを含む、請求項1に記載の処理システム。
【請求項8】
前記作業者及び前記物品が写る第2画像から、前記作業者の姿勢を推定し、
前記第2画像から、前記物品の状態と、前記作業者による前記物品への作業箇所と、から選択される1つ以上を推定し、
前記第2画像から推定された結果を用いて、複数のノード及び複数のエッジを含む第2グラフデータを生成し、
前記第1グラフデータに加えて前記ニューラルネットワークに前記第2グラフデータを入力し、前記ニューラルネットワークから出力された結果を用いて前記作業を推定する、
請求項1に記載の処理システム。
【請求項9】
前記第1グラフデータの前記複数のノードと、前記第2グラフデータの前記複数のノードと、は複数のエッジによってそれぞれ接続され、
前記第1グラフデータと前記第2グラフデータが、前記ニューラルネットワークに入力される、請求項8に記載の処理システム。
【請求項10】
前記第2画像は、前記第1画像の後に得られた画像であり、
前記第2グラフデータは、前記第1グラフデータの後に前記ニューラルネットワークに入力され、
前記ニューラルネットワークにおいて、前記第1グラフデータが前記GNNに入力され、前記GNNから出力された結果が、Long Short Term Memory(LSTM)ネットワークに入力され、その後に、前記第2グラフデータが前記GNNに入力され、前記GNNから出力された結果が、前記LSTMネットワークに入力される、請求項8に記載の処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、処理システム、処理方法、プログラム、及び記憶媒体に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
実行されている作業を自動的に推定するシステムがある。このシステムについて、作業をより精度良く推定可能な技術が求められている。
【先行技術文献】
【特許文献】
【0003】
特開2017-91249号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、作業をより精度良く推定可能な、処理システム、処理方法、プログラム、及び記憶媒体を提供することである。
【課題を解決するための手段】
【0005】
実施形態に係る処理システムは、作業者及び物品が写る第1画像から、前記作業者の姿勢を推定する。前記処理システムは、前記第1画像から、前記物品の状態と、前記作業者による前記物品への作業箇所と、から選択される1つ以上を推定する。前記処理システムは、前記状態及び前記作業箇所から選択される前記1つ以上と、前記姿勢と、に基づいて、複数のノード及び複数のエッジを含む第1グラフデータを生成する。前記処理システムは、グラフニューラルネットワーク(GNN)を含むニューラルネットワークに前記第1グラフデータを入力する。前記処理システムは、前記ニューラルネットワークから出力された結果を用いて、前記作業者によって実行されている作業を推定する。
【図面の簡単な説明】
【0006】
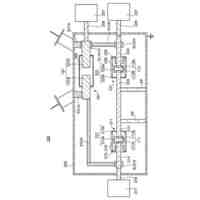
図1は、実施形態に係る処理システムの構成を示す模式図である。
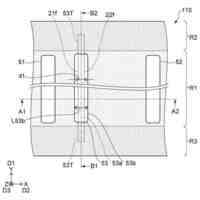
図2(a)は、作業者及び物品を示す模式図である。図2(b)は、撮像装置によって取得される画像の一例である。
図3は、実施形態に係る処理方法の一例を示すフローチャートである。
図4(a)~図4(c)は、実施形態に係る処理システムによる処理を説明するための図である。
図5(a)~図5(c)は、実施形態に係る処理システムによる処理を説明するための図である。
図6(a)~図6(c)は、実施形態に係る処理システムによる処理を説明するための図である。
図7(a)~図7(d)は、実施形態に係る処理システムによる処理を説明するための図である。
図8(a)及び図8(b)は、実施形態に係る処理システムによる処理を説明するための図である。
図9(a)~図9(c)は、実施形態に係る処理システムによる処理を説明するための図である。
図10(a)~図10(d)は、実施形態に係る処理システムによる処理を説明するための図である。
図11は、物品位置の推定方法を示すフローチャートである。
図12は、追跡処理を行う際の位置の推定結果を説明するための模式図である。
図13は、実施形態に係る処理システムによる処理を説明するための図である。
図14(a)~図14(d)は、実施形態に係る処理システムによる処理を説明するための図である。
図15(a)~図15(d)は、実施形態に係る処理システムによる処理を説明するための図である。
図16は、追跡処理の概要を示すフローチャートである。
図17は、追跡処理における更新処理を示すフローチャートである。
図18(a)~図18(c)は、実施形態に係る処理システムによる処理を説明するための画像である。
図19(a)~図19(c)は、実施形態に係る処理システムによる処理を説明するための画像である。
図20は、作業箇所の推定方法を説明するための模式図である。
図21は、作業箇所の推定方法を示すフローチャートである。
図22は、第1グラフデータの構造を例示する模式図である。
図23は、第1グラフデータの構造を例示する模式図である。
図24は、第1グラフデータの構造を例示する模式図である。
図25は、ニューラルネットワークの構造を例示する模式図である。
図26(a)は、第1グラフデータの具体的構造を説明するための図である。図26(b)は、特徴ベクトルを例示する図である。
図27(a)~図27(f)は、特徴ベクトルの具体例を示す図である。
図28は、ニューラルネットワークの別の構造を例示する模式図である。
図29は、グラフデータの別の構造を例示する模式図である。
図30(a)及び図30(b)は、グラフデータの別の構造を例示する模式図である。
図31は、ニューラルネットワークの別の構造を例示する模式図である。
図32は、ニューラルネットワークの別の構造を例示する模式図である。
図33は、LSTMネットワークの具体的構造を例示する模式図である。
図34は、実施形態に係る処理システムによる出力結果を例示する模式図である。
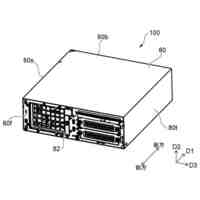
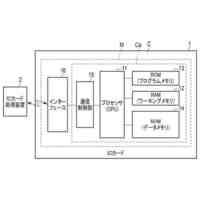
図35は、ハードウェア構成を示す模式図である。
【発明を実施するための形態】
【0007】
以下に、本発明の各実施形態について図面を参照しつつ説明する。図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。本願明細書と各図において、既に説明したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
図1は、実施形態に係る処理システムの構成を示す模式図である。
実施形態に係る処理システムは、作業者が行っている作業を画像から推定するために用いられる。図1に示すように、処理システム1は、撮像装置10、処理装置20、記憶装置30、入力装置40、及び出力装置50を含む。
【0009】
図2(a)は、作業者及び物品を示す模式図である。図2(b)は、撮像装置によって取得される画像の一例である。
例えば図2(a)に示すように、運び台Cの上に、物品A1が置かれている。作業者Wは、物品A1に対して予め定められた作業を行う。物品A1は、半製品、製品に用いられるユニットなどである。撮像装置10は、作業者W及び物品A1を撮像し、画像を取得する。図2(b)は、撮像装置10により取得された画像IMGを示す。
【0010】
好ましくは、撮像装置10は、壁又は天井などに取り付けられ、上方から作業者W及び物品A1を撮像する。これにより、作業者W及び物品A1が写り易くなる。撮像装置10による撮像の向きは、真下でも良いし、鉛直方向に対して傾斜していても良い。撮像装置10は、画像を繰り返し取得する。又は、撮像装置10は、動画を取得しても良い。この場合、動画から静止画が繰り返し切り出される。撮像装置10は、画像又は動画を記憶装置30に保存する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
2か月前
株式会社東芝
センサ
2日前
株式会社東芝
センサ
16日前
株式会社東芝
計測装置
10日前
株式会社東芝
電子装置
16日前
株式会社東芝
計算装置
23日前
株式会社東芝
回転電機
2日前
株式会社東芝
遮断装置
16日前
株式会社東芝
電源回路
1か月前
株式会社東芝
電子機器
9日前
株式会社東芝
電子機器
9日前
株式会社東芝
半導体装置
16日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
16日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
17日前
株式会社東芝
穴検出装置
10日前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
17日前
株式会社東芝
半導体装置
20日前
株式会社東芝
ICカード
23日前
株式会社東芝
半導体装置
23日前
株式会社東芝
ガス遮断器
1か月前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
24日前
株式会社東芝
蓄電池装置
24日前
株式会社東芝
水処理装置
1か月前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ