TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029898
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023134782
出願日
2023-08-22
発明の名称
情報処理装置、情報処理方法、及びプログラム
出願人
学校法人早稲田大学
代理人
弁理士法人創光国際特許事務所
,
個人
,
個人
,
個人
,
個人
主分類
G01S
19/21 20100101AFI20250228BHJP(測定;試験)
要約
【課題】測位衛星が送信する信号の偽装検知技術を改善する。
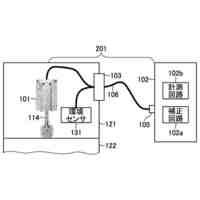
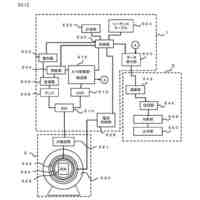
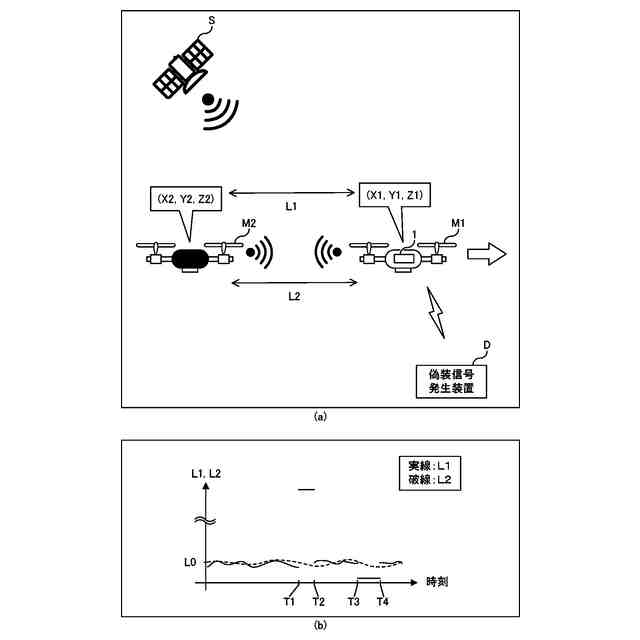
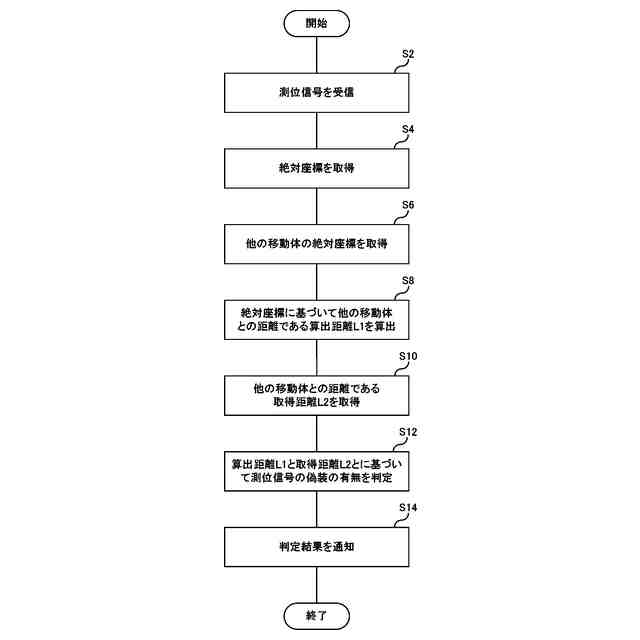
【解決手段】絶対座標取得部130は、航法衛星が送信する信号として定められたフォーマットに基づく測位信号を受信して移動体の位置を示す自己位置座標を取得する。近距離無線通信部11は、他の移動体から、当該他の移動体の位置を示す他者位置座標を受信する。距離算出部131は、自己位置座標と他者位置座標との距離を算出する。距離取得部132は、移動体と他の移動体との間の距離を取得する。判定部133は、距離算出部131が算出した距離である算出距離と、距離取得部132が取得した距離である取得距離とに基づいて、自己位置座標を算出するために用いられた測位信号と他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方の偽装の可能性の有無を判定する。通知部134は、偽装の可能性があると判定された場合に通知する。
【選択図】図2
特許請求の範囲
【請求項1】
移動体に搭載される情報処理装置であって、
航法衛星が送信する信号として定められたフォーマットに基づく測位信号を受信して前記移動体の位置を示す絶対座標である自己位置座標を取得する絶対座標取得部と、
前記移動体とは異なる他の移動体から、近距離無線通信を介して当該他の移動体の位置を示す絶対座標である他者位置座標を受信する近距離無線通信部と、
前記自己位置座標と前記他者位置座標との間の距離を算出する距離算出部と、
前記移動体と前記他の移動体との間の距離を取得する距離取得部と、
前記距離算出部が算出した距離である算出距離と、前記距離取得部が取得した距離である取得距離と、に基づいて、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方の偽装の可能性の有無を判定する判定部と、
偽装の可能性があると判定された場合に通知する通知部と、を備える、
情報処理装置。
続きを表示(約 3,000 文字)
【請求項2】
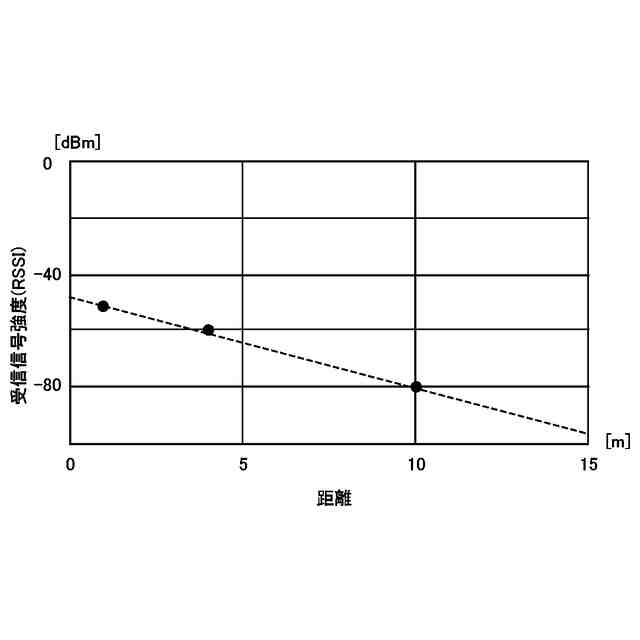
前記距離取得部は、前記近距離無線通信部が前記他の移動体から受信した信号の信号強度に基づいて前記取得距離を取得する、
請求項1に記載の情報処理装置。
【請求項3】
前記距離取得部は、前記移動体が備える測距センサによって計測された前記移動体と前記他の移動体との距離を前記取得距離として取得する、
請求項1に記載の情報処理装置。
【請求項4】
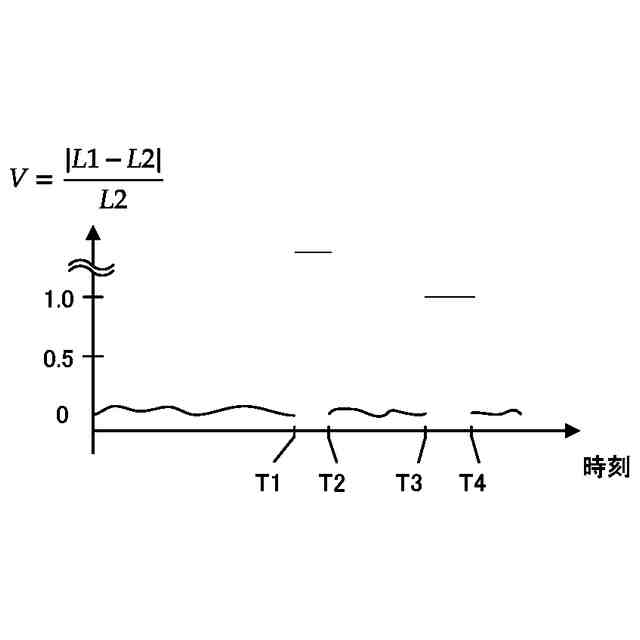
前記判定部は、前記算出距離と前記取得距離との差の絶対値に対する前記取得距離の比があらかじめ定めた閾値を超えた場合に、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方が偽装された可能性があると判定する、
請求項1に記載の情報処理装置。
【請求項5】
前記判定部は、前記算出距離に対する前記取得距離の比がある所定の閾値以下である場合、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号とのいずれもが偽装された疑いがあると判定する、
請求項1に記載の情報処理装置。
【請求項6】
移動体に搭載される情報処理装置であって、
航法衛星が送信する信号として定められたフォーマットに基づく測位信号を受信して前記移動体の位置を示す絶対座標である自己位置座標の時系列データを取得する絶対座標取得部と、
前記移動体とは異なる他の移動体から近距離無線通信を介して周期的に受信した時系列データであって、当該他の移動体の位置を示す絶対座標である他者位置座標の時系列データを受信する近距離無線通信部と、
前記移動体の加速度を測定する加速度センサが取得した前記移動体の加速度の時系列データを取得する加速度取得部と、
自己位置座標の時系列データ、他者位置座標の時系列データ、及び移動体の加速度の時系列データを入力したときに、自己位置座標を算出するために用いられた測位信号と他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方が偽装されているか否かの判定結果を出力するように機械学習された学習モデルを記憶する記憶部と、
前記絶対座標取得部が取得した自己位置座標の時系列データ、前記近距離無線通信部が受信した他者位置座標の時系列データ、及び前記加速度取得部が取得した移動体の加速度の時系列データを前記学習モデルに入力することにより、前記判定結果を取得するモデル適用部と、
前記判定結果を通知する通知部と、を備える、
情報処理装置。
【請求項7】
前記自己位置座標の時系列データと前記他者位置座標の時系列データとに基づいて、前記自己位置座標と前記他者位置座標との間の距離の時系列データを算出する距離算出部をさらに備え、
前記学習モデルは、距離の時系列データをさらに入力するように学習されており、
前記モデル適用部は、前記絶対座標取得部が取得した自己位置座標の時系列データ、前記近距離無線通信部が受信した他者位置座標の時系列データ、距離の時系列データ、前記距離算出部が算出した距離の時系列データ、及び前記加速度取得部が取得した移動体の加速度の時系列データを前記学習モデルに入力することにより、前記判定結果を取得する、
請求項6に記載の情報処理装置。
【請求項8】
移動体に搭載される情報処理装置のプロセッサが、
航法衛星が送信する信号として定められたフォーマットに基づく測位信号を受信するステップと、
前記測位信号に基づいて前記移動体の位置を示す絶対座標である自己位置座標を取得するステップと、
前記移動体とは異なる他の移動体から、近距離無線通信を介して当該他の移動体の位置を示す絶対座標である他者位置座標を受信するステップと、
前記自己位置座標と前記他者位置座標との間の距離を算出するステップと、
前記移動体と前記他の移動体との間の距離を取得するステップと、
前記距離を算出するステップにおいて算出された距離である算出距離と、前記距離を取得するステップにおいて取得された距離である取得距離と、に基づいて、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方の偽装の可能性の有無を判定するステップと、
偽装の可能性があると判定された場合に通知するステップと、を実行する、
情報処理方法。
【請求項9】
移動体に搭載されるコンピュータに、
航法衛星が送信する信号として定められたフォーマットに基づく測位信号を受信する機能と、
前記測位信号に基づいて前記移動体の位置を示す絶対座標である自己位置座標を取得する機能と、
前記移動体とは異なる他の移動体から、近距離無線通信を介して当該他の移動体の位置を示す絶対座標である他者位置座標を受信する機能と、
前記自己位置座標と前記他者位置座標との間の距離を算出する機能と、
前記移動体と前記他の移動体との間の距離を取得する機能と、
前記距離を算出するステップにおいて算出された距離である算出距離と、前記距離を取得するステップにおいて取得された距離である取得距離と、に基づいて、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方の偽装の可能性の有無を判定する機能と、
偽装の可能性があると判定された場合に通知する機能と、を実行させる、
プログラム。
【請求項10】
移動体に搭載されるコンピュータに、
航法衛星が送信する信号として定められたフォーマットに基づく測位信号を受信する機能と、
前記測位信号に基づいて前記移動体の位置を示す絶対座標である自己位置座標の時系列データを取得する機能と、
前記移動体とは異なる他の移動体から近距離無線通信を介して周期的に受信した時系列データであって、当該他の移動体の位置を示す絶対座標である他者位置座標の時系列データを受信する機能と、
前記移動体の加速度を測定する加速度センサが取得した前記移動体の加速度の時系列データを取得する機能と、
自己位置座標の時系列データ、他者位置座標の時系列データ、及び移動体の加速度の時系列データを入力したときに、自己位置座標を算出するために用いられた測位信号と他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方が偽装されているか否かの判定結果を出力するように機械学習された学習モデルを記憶部から取得する機能と、
取得した前記自己位置座標の時系列データ、受信した前記他者位置座標の時系列データ、及び取得した前記移動体の加速度の時系列データを前記学習モデルに入力することにより、前記判定結果を取得する機能と、
前記判定結果を通知する機能と、を実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法、及びプログラムに関し、特に、測位衛星すなわちGNSS(Global Navigation Satellite System)からの測位信号を用いて得られる測位情報を利用した移動体の位置把握技術において、測位信号が偽装されているか否かを判定する技術に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
人工衛星の一種である測位衛星が送信する信号を偽装(スプーフィング;Spoofing)し、不正な測位情報を混入させる測位信号のスプーフィングがかねてより問題になっており、その対策としてこの測位信号がスプーフィングされているか否かを判定する技術が検討されてきた。特許文献1には、人工衛星から受信した測位信号に基づいて自車両の位置を算出し、自車両の周辺に位置する周辺車両との間で通信を行って周辺車両の位置を含む周辺車両情報を取得し、この周辺車両情報に含まれる周辺車両の位置と、自車両の位置とを比較し、これらの差が所定の閾値よりも大きい場合に、自車両の位置が、偽装された測位信号に基づくものである旨の判定を行う偽装判定技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-015529号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1で開示された技術では、自車両の位置との比較対象である周辺車両の位置も、測位信号に基づいて算出される。このため、特許文献1で開示された技術では、周辺車両の位置が偽装された測位信号の影響を受けている可能性を排除できず、比較対象としての信頼性が必ずしも担保されていない。このように、航法衛星が送信する信号の偽装を検知する技術には改善の余地があると考えられる。
【0005】
本発明はこれらの点に鑑みてなされたものであり、測位衛星が送信する信号の偽装検知技術を改善することを目的とする。
【課題を解決するための手段】
【0006】
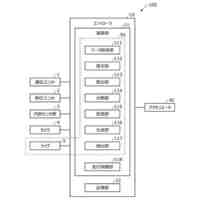
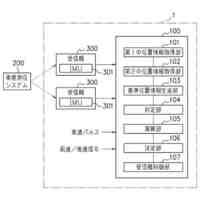
本発明の第1の態様は、移動体に搭載される情報処理装置である。この装置は、航法衛星が送信する信号として定められたフォーマットに基づく測位信号を受信して前記移動体の位置を示す絶対座標である自己位置座標を取得する絶対座標取得部と、前記移動体とは異なる他の移動体から、近距離無線通信を介して当該他の移動体の位置を示す絶対座標である他者位置座標を受信する近距離無線通信部と、前記自己位置座標と前記他者位置座標との間の距離を算出する距離算出部と、前記移動体と前記他の移動体との間の距離を取得する距離取得部と、前記距離算出部が算出した距離である算出距離と、前記距離取得部が取得した距離である取得距離と、に基づいて、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方の偽装の可能性の有無を判定する判定部と、偽装の可能性があると判定された場合に通知する通知部と、を備える。
【0007】
前記距離取得部は、前記近距離無線通信部が前記他の移動体から受信した信号の信号強度に基づいて前記取得距離を取得してもよい。
【0008】
前記距離取得部は、前記移動体が備える測距センサによって計測された前記移動体と前記他の移動体との距離を前記取得距離として取得してもよい。
【0009】
前記判定部は、前記算出距離と前記取得距離との差の絶対値に対する前記取得距離の比があらかじめ定めた閾値を超えた場合に、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号との少なくともいずれか一方が偽装された可能性があると判定してもよい。
【0010】
前記判定部は、前記算出距離に対する前記取得距離の比がある所定の閾値以下である場合、前記自己位置座標を算出するために用いられた測位信号と前記他者位置座標を算出するために用いられた測位信号とのいずれもが偽装された疑いがあると判定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
3日前
個人
光フアィバー距離計測器
5日前
個人
光フアィバー距離計測器
5日前
個人
バッテリ用交流電流供給装置
5日前
株式会社ハシマ
検針機
2日前
株式会社オービット
検査装置
12日前
富士電機株式会社
回転機
13日前
株式会社東芝
センサ
12日前
有限会社フィット
外観検査装置
16日前
株式会社SUBARU
車載装置
19日前
株式会社東芝
試験装置
19日前
アズビル株式会社
真空計測システム
13日前
靜甲株式会社
液切れ性評価システム
20日前
アズビル株式会社
真空計測システム
13日前
DIC株式会社
測定装置
4日前
シスメックス株式会社
分析装置
9日前
富士電機株式会社
放射線検出器
4日前
株式会社アドバンテスト
試験装置
11日前
オムロン株式会社
電気装置
20日前
株式会社タムラ製作所
電流検出器
9日前
個人
ネブライザー
11日前
株式会社デンソー
電流検出器
16日前
本田技研工業株式会社
物体検出装置
2日前
株式会社国際電気
調整装置
16日前
ダイハツ工業株式会社
凹部の深さ測定方法
2日前
本田技研工業株式会社
物体検出装置
2日前
スタンレー電気株式会社
車両前方視認装置
2日前
スタンレー電気株式会社
車両前方視認装置
2日前
日鉄テックスエンジ株式会社
情報処理装置
9日前
矢崎総業株式会社
電流センサ
3日前
株式会社エイアンドティー
生体試料分析装置
9日前
株式会社日本マイクロニクス
プローブ
9日前
愛知製鋼株式会社
測量方法及び測量システム
9日前
株式会社KRI
麹造り工程の計測装置および計測方法
19日前
公立大学法人大阪
測定方法および構造体
16日前
アズビル株式会社
温度測定システムおよび方法
9日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ