TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018512
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122271
出願日
2023-07-27
発明の名称
識別システム、識別方法および作業車両
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
G06T
7/00 20170101AFI20250130BHJP(計算;計数)
要約
【課題】計算負荷を抑えて、カメラによって撮影した撮影画像から対象を識別可能な識別システム、識別方法および作業車両を提供すること。
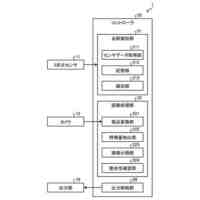
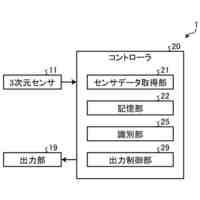
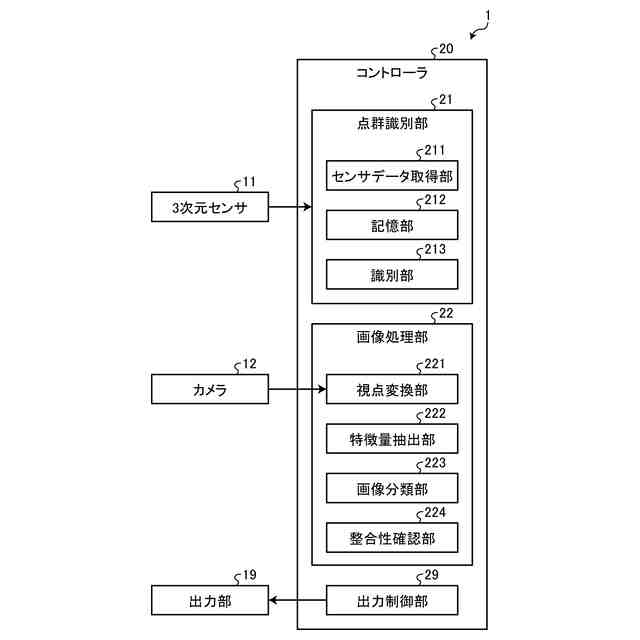
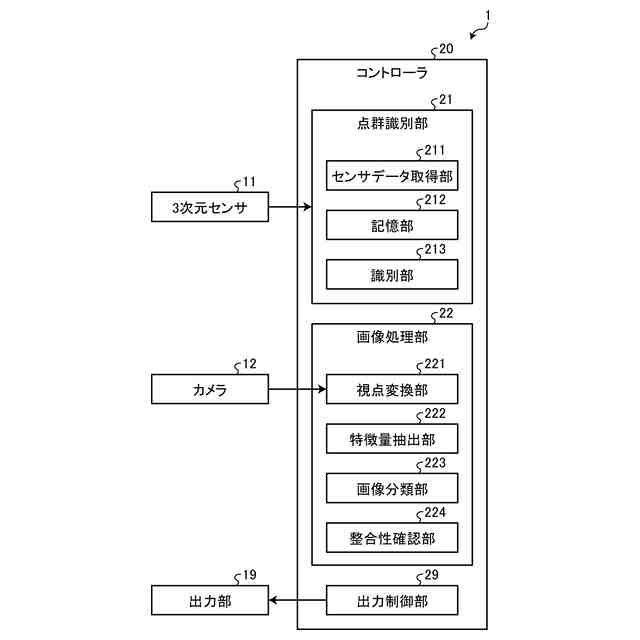
【解決手段】識別システム1は、作業車両に取り付けられ、作業車両の周辺に存在する物体を検出する3次元センサ11と、作業車両に取り付けられ、作業車両の周辺を撮影するカメラ12と、コントローラ20と、を備える。コントローラ20は、3次元センサ11から物体検出データである点群データ、および、カメラ12が撮影した撮影画像の画像データを取得し、点群データに基づいて対象を識別し、点群データに基づく識別結果を用いて撮影画像を変換し、変換画像に基づいて対象を識別する。
【選択図】図2
特許請求の範囲
【請求項1】
作業車両の周辺に存在する物体から対象を識別するための識別システムであって、
前記作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出するための物体検出センサと、
前記作業車両に取り付けられ、前記作業車両の周辺を撮影するためのカメラと、
コントローラと、
を備え、
前記コントローラは、
前記物体検出センサから物体検出データである点群データ、および、前記カメラが撮影した撮影画像の画像データを取得し、
前記点群データに基づいて対象を識別し、
前記点群データに基づく識別結果を用いて前記撮影画像を変換し、
変換画像に基づいて前記対象を識別する、
識別システム。
続きを表示(約 1,200 文字)
【請求項2】
前記変換画像は、前記点群データに基づく識別結果を用いて前記撮影画像を所定方向から見たように視点変換した画像である、
請求項1に記載の識別システム。
【請求項3】
前記コントローラは、
前記点群データに基づいて識別された対象の位置及び姿勢と、前記物体検出センサと前記カメラとの相対的な位置関係とに基づいて、前記撮影画像を視点変換する、
請求項2に記載の識別システム。
【請求項4】
前記所定方向は、作業車両が対象に対して作業を行う際の正面から見た方向である、
請求項2または3に記載の識別システム。
【請求項5】
前記コントローラは、
前記点群データから対象の外形の少なくとも一部を構成する平面を推定し、
推定した前記平面上に位置する点群を抽出して二値画像を生成し、
前記二値画像から前記対象を識別し、
推定した前記平面上に位置する複数の点を前記撮影画像に投影し、
前記撮影画像に投影した前記複数の点を基準にして視点変換を行う、
請求項2または3に記載の識別システム。
【請求項6】
前記コントローラは、
前記点群データに基づいて識別した前記対象と、前記変換画像に基づいて識別した前記対象との整合性を確認する、
請求項1に記載の識別システム。
【請求項7】
作業車両の周辺に存在する物体から対象を識別するための識別方法であって、
前記作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出するための物体検出センサから、物体検出データである点群データを取得し、
前記作業車両に取り付けられ、前記作業車両の周辺を撮影するためのカメラから、撮影画像の画像データを取得し、
前記点群データに基づいて対象を識別し、
前記点群データに基づく識別結果を用いて前記撮影画像を変換し、
変換画像に基づいて前記対象を識別する、
識別方法。
【請求項8】
作業車両であって、
車体と、
前記作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出するための物体検出センサと、
前記作業車両に取り付けられ、前記作業車両の周辺を撮影するためのカメラと、
コントローラと、
を備え、
前記コントローラは、
前記物体検出センサから物体検出データである点群データ、および、前記カメラが撮影した撮影画像の画像データを取得し、
前記点群データに基づいて対象を識別し、
前記点群データに基づく識別結果を用いて前記撮影画像を変換し、
変換画像に基づいて前記対象を識別する、
作業車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、識別システム、識別方法および作業車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば、ダンプトラック、ホイールローダ、ショベル、フォークリフトなどの作業車両により正確な作業を行うためには、作業車両による作業対象の識別性能を向上させる必要がある。特許文献1に開示されているような、対象であるパレットまでの距離を検出するレーザセンサと、レーザセンサの検出データに基づいて、パレットの前面の平面方程式を算出する平面方程式算出部と、平面方程式算出部により算出されたパレットの前面の平面方程式を用いて、パレットの位置及び姿勢を推定する推定演算部とを備え、推定演算部は、パレットの姿勢としてパレットのヨー角、ピッチ角及びロール角を計算する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-42070号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、ダンプトラック、ホイールローダ、ショベル、フォークリフトなどの作業車両による作業対象の位置及び姿勢を高精度に推定するためには、測距精度の高いLiDARのような3次元センサを用いて対象を識別することが有効である。ところが、3次元センサの測定データである点群では、例えば、対象の色情報がないこと、または、分解能が低いことなどが原因となり、対象を誤って識別することがある。識別性能を高めるためには、カメラによって撮影した撮影画像を用いることが有効であるが、計算負荷が高くなるおそれがある。
【0005】
本開示の態様は、計算負荷を抑えて、カメラによって撮影した撮影画像から対象を識別可能な識別システム、識別方法および作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の態様に従えば、作業車両に取り付けられ、作業車両の周辺に存在する物体を検出するための物体検出センサと、作業車両に取り付けられ、作業車両の周辺を撮影するためのカメラと、コントローラと、を備える、作業車両の周辺に存在する物体から対象を識別するための識別システムが提供される。コントローラは、物体検出センサから物体検出データである点群データ、および、カメラが撮影した撮影画像の画像データを取得し、点群データに基づいて対象を識別し、点群データに基づく識別結果を用いて撮影画像を変換し、変換画像に基づいて対象を識別する。
【0007】
本開示の態様に従えば、作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出するための物体検出センサから、物体検出データである点群データを取得するステップと、作業車両に取り付けられ、前記作業車両の周辺を撮影するためのカメラから、撮影画像の画像データを取得するステップと、点群データに基づいて対象を識別するステップと、前記点群データに基づく識別結果を用いて前記撮影画像を変換するステップと、変換画像に基づいて前記対象を識別するステップと、を備える、作業車両の周辺に存在する物体から対象を識別するための識別方法が提供される。
【0008】
本開示の態様に従えば、車体と、作業車両に取り付けられ、作業車両の周辺に存在する物体を検出する物体検出センサと、作業車両に取り付けられ、作業車両の周辺を撮影するカメラと、コントローラと、を備える、作業車両が提供される。コントローラは、物体検出センサから物体検出データである点群データ、および、カメラが撮影した撮影画像の画像データを取得し、点群データに基づいて対象を識別し、点群データに基づく識別結果を用いて撮影画像を変換し、変換画像に基づいて対象を識別する。
【発明の効果】
【0009】
本開示の態様によれば、計算負荷を抑えて、カメラによって撮影した撮影画像から対象を識別可能な識別システム、識別方法および作業車両が提供される。
【図面の簡単な説明】
【0010】
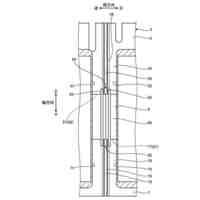
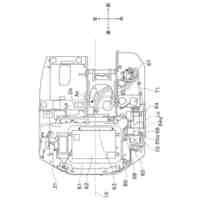
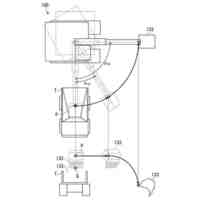
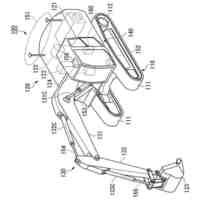
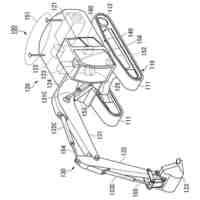
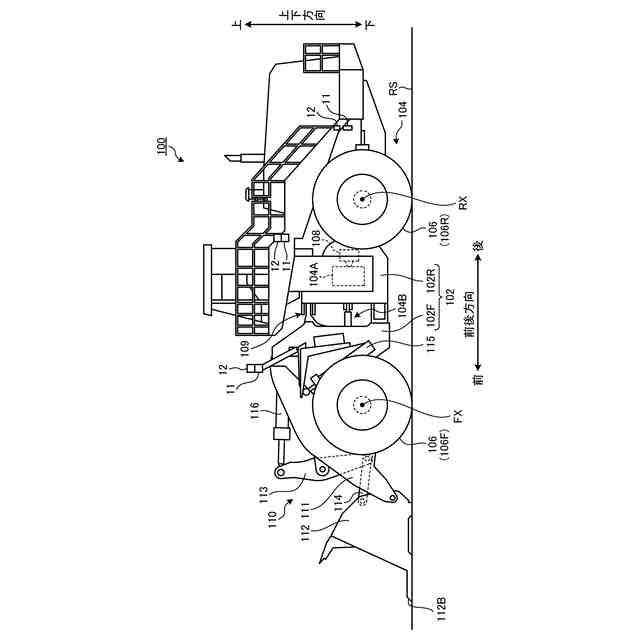
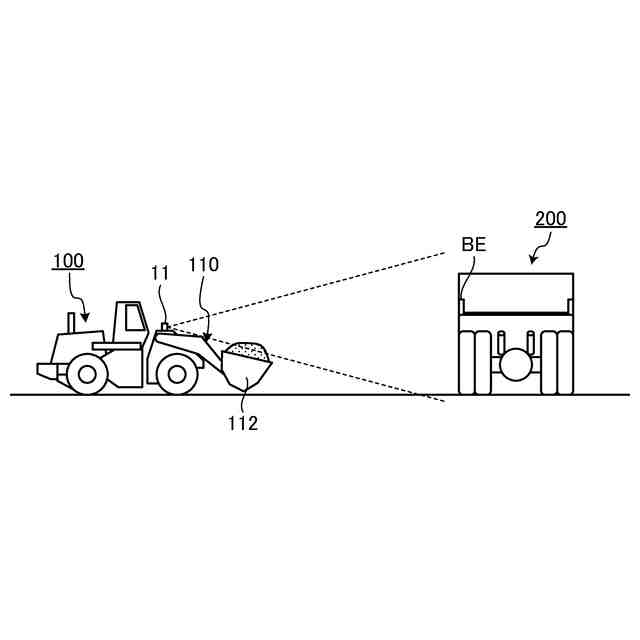
図1は、実施形態に係る作業車両を示す側面図である。
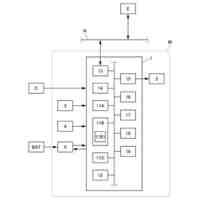
図2は、実施形態に係る識別システムを示す機能ブロック図である。
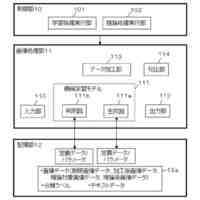
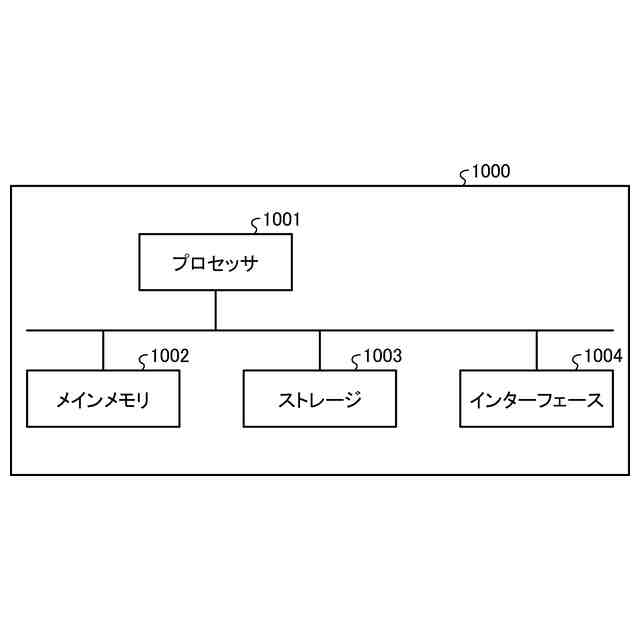
図3は、実施形態に係るコンピュータシステムを示すブロック図である。
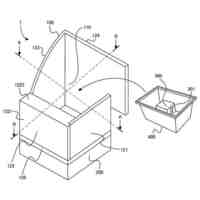
図4は、実施形態に係る作業車両の動作を示す模式図である。
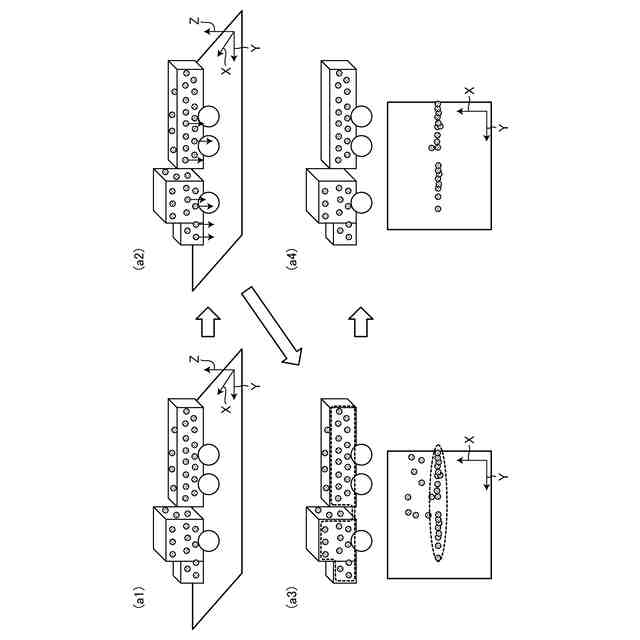
図5は、対象を示す点群の一例を示す図である。
図6は、対象の識別処理の一例を説明する模式図である。
図7は、対象の二値画像の一例を示す図である。
図8は、対象の特徴パターンの一例を示す図である。
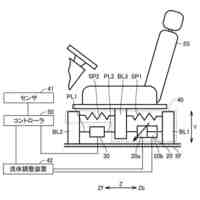
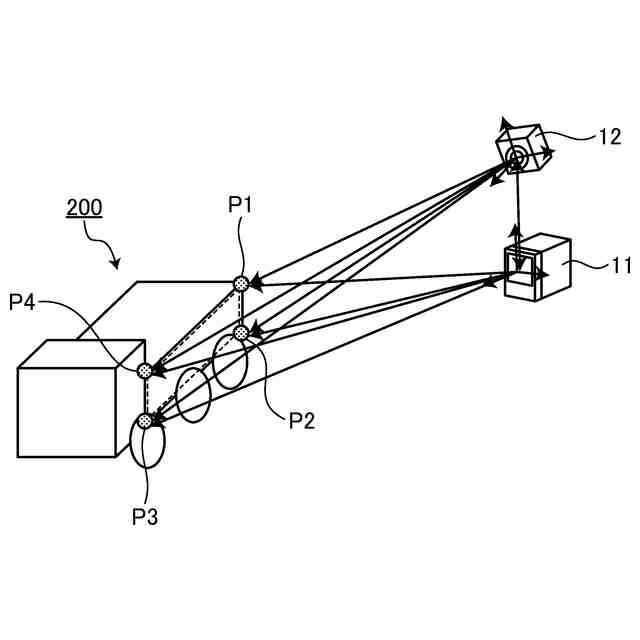
図9は、3次元センサ、カメラおよび対象の位置関係を示す模式図である。
図10は、対象を撮影した撮影画像の一例を説明する図である。
図11は、図10に示す撮影画像を視点変換した変換画像の一例を説明する図である。
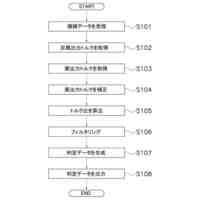
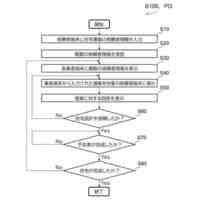
図12は、点群による対象の識別方法の処理の一例を示すフローチャートである。
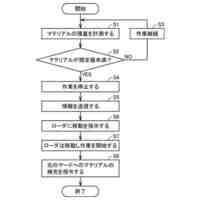
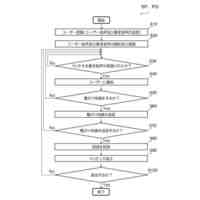
図13は、実施形態に係る対象の識別方法の処理の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
モータ
今日
株式会社小松製作所
ステータ
今日
株式会社小松製作所
電動式作業機械
14日前
株式会社小松製作所
電動式作業機械
14日前
株式会社小松製作所
作業車両、およびブレード支持構造
7日前
株式会社小松製作所
識別システム、識別方法および作業車両
7日前
株式会社小松製作所
識別システム、識別方法および作業車両
7日前
株式会社小松製作所
作業機械の性能を評価するためのシステム及び方法
今日
株式会社小松製作所
作業機械の性能を評価するためのシステム及び方法
今日
株式会社小松製作所
作業車両、作業車両を含むシステムおよび作業車両の制御方法
今日
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
13日前
株式会社小松製作所
積込機械の制御装置、積込機械の制御方法および遠隔操作システム
13日前
株式会社小松製作所
作業機械のオイル性状診断システムおよび作業機械のオイル性状診断方法
7日前
株式会社小松製作所
作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システム
6日前
株式会社小松製作所
作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システム
6日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の制御方法、及び作業機械の遠隔操作システム
7日前
個人
情報提示方法
21日前
個人
プログラム
20日前
個人
アカウントマップ
14日前
個人
自動精算システム
2か月前
個人
自動精算システム
29日前
個人
RFタグ読取装置
1か月前
個人
プログラム
13日前
個人
売買システム
1か月前
個人
管理サーバ
1か月前
個人
市場受発注システム
27日前
個人
発想支援方法及びシステム
24日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
案件管理装置および端末装置
今日
キヤノン株式会社
印刷装置
2か月前
個人
学習装置及び推論装置
13日前
個人
分類処理プログラム及び方法
24日前
個人
VRによる人体各部位の立体化
1か月前
株式会社発明屋
電池指向の構造設計
7日前
井関農機株式会社
ロボット作業車両
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ