TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025019774
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123581
出願日
2023-07-28
発明の名称
作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システム
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/22 20060101AFI20250131BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械による作業中に意図しない旋回が生じることを防ぐ。
【解決手段】作業機械の制御システムは、旋回体の操作がなく作業機の操作がなされているときに、旋回体が旋回しているか否かを判定する。制御システムは、旋回体が旋回しているか否かの判定の結果を出力する。
【選択図】図1
特許請求の範囲
【請求項1】
旋回中心周りに回転可能な旋回体と、前記旋回体に取り付けられた作業機と、を備える作業機械の制御システムであって、
前記作業機が駆動しているときに、前記旋回体の姿勢と前記旋回体の基準姿勢とのずれを特定する旋回判定部と、
特定された前記ずれの大きさに関する信号を出力する出力部と、を備える
作業機械の制御システム。
続きを表示(約 870 文字)
【請求項2】
前記出力部は、特定された前記ずれの大きさが所定の閾値より大きい場合、前記旋回体が旋回する方向の反対方向に前記旋回体を旋回させる操作信号を出力する
請求項1に記載の作業機械の制御システム。
【請求項3】
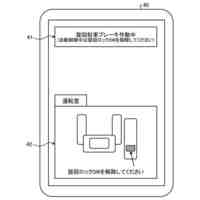
前記出力部は、特定された前記ずれの大きさが所定の閾値より大きい場合、前記旋回体が旋回していることを通知するための前記信号を出力する
請求項1に記載の作業機械の制御システム。
【請求項4】
前記作業機は、前記作業機が駆動する第一軸と交差する第二軸回りに回転可能な作業具を備え、
前記旋回判定部は、
前記作業具を前記第二軸回りに回転させる操作がなく前記作業機が前記第一軸回りに駆動しているときに、前記作業具が前記第二軸回りに回転しているか否かを判定する
請求項1に記載の作業機械の制御システム。
【請求項5】
前記旋回判定部は、前記作業機の駆動による作業の開始時における前記旋回体の姿勢を前記基準姿勢とする
請求項1に記載の制御システム。
【請求項6】
前記旋回判定部は、前記作業機の駆動による作業の開始以降の前記旋回体を旋回させる旋回モータの作動媒体に係る計測値に基づいて、前記旋回体の姿勢を特定する
請求項1に記載の制御システム。
【請求項7】
旋回中心周りに回転可能な旋回体と、前記旋回体に取り付けられた作業機と、を備える作業機械の制御方法であって、
前記作業機が駆動しているときに、前記旋回体の姿勢と前記旋回体の基準姿勢とのずれを特定するステップと、
特定された前記ずれの大きさに関する信号を出力するステップと
を有する作業機械の制御方法。
【請求項8】
請求項1から請求項6のいずれか一項に記載の作業機械の制御システムと、
前記作業機械から遠隔に設けられた表示装置および操作装置とを備える、
作業機械の遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、自動掘削処理を行う作業機械に関する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-041354号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
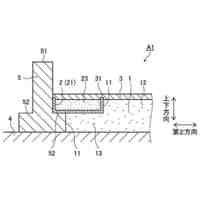
旋回体に支持された作業機を備える作業機械による掘削作業や排土作業は、通常、旋回体を旋回させずに作業機を駆動させることで行われる。一方で、環境によっては、作業中に旋回体の旋回操作をしていないにも関わらず、旋回体が旋回してしまうことがある。例えば、溝の壁面の掘削など、バケットの片側を用いて掘削を行う場合、バケットに掛かる荷重が左右でアンバランスとなり、反力を受ける旋回体の回転中心にモーメントが発生し、旋回体が旋回してしまう可能性がある。また作業機械が傾斜地に停車している場合、重力によってモーメントが発生し、旋回体が旋回してしまう可能性がある。
本開示の目的は、作業中に意図しない旋回が生じることを防ぐことができる作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システムを提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、作業機械の制御システムは、旋回中心周りに回転可能な旋回体と、前記旋回体に取り付けられた作業機と、を備える作業機械の制御システムであって、前記作業機が駆動しているときに、前記旋回体の姿勢と前記旋回体の基準姿勢とのずれを特定する旋回判定部と、特定された前記ずれの大きさに関する信号を出力する出力部と、を備える。
【発明の効果】
【0006】
上記態様によれば、作業機械の制御システムは、作業機械による作業中に意図しない旋回が生じることを防ぐことができる。
【図面の簡単な説明】
【0007】
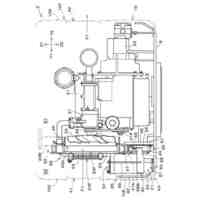
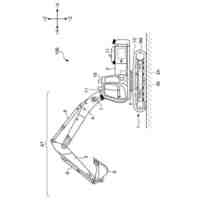
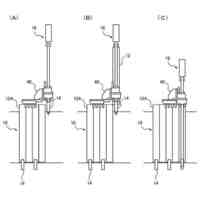
第一実施形態に係る作業機械の構成を示す概略図である。
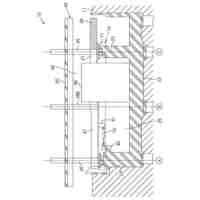
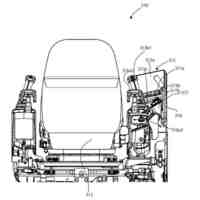
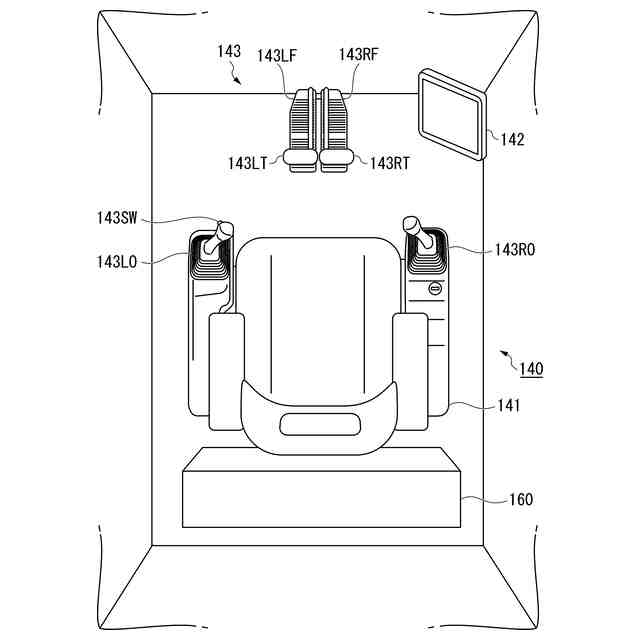
第一実施形態に係る運転室の内部の構成を示す図である。
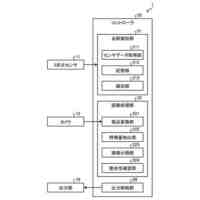
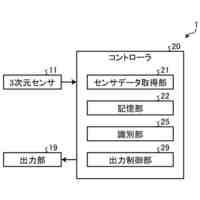
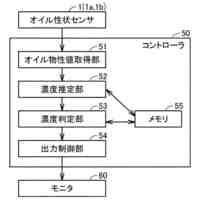
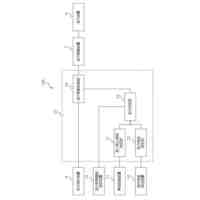
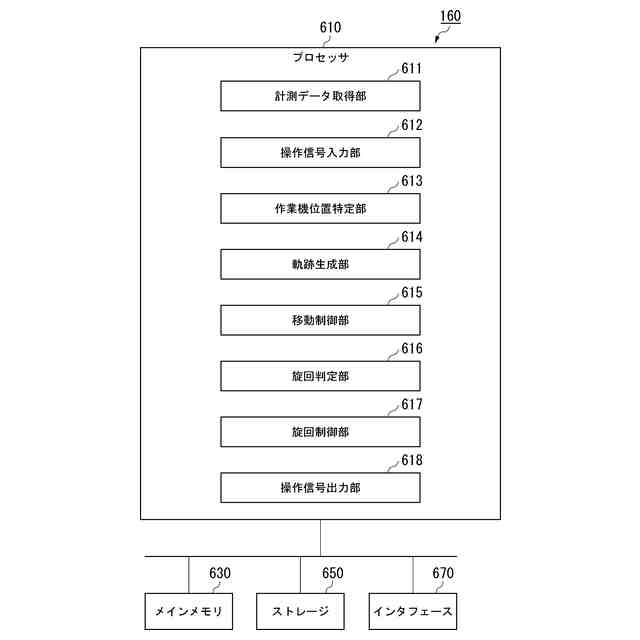
第一実施形態に係る制御装置の構成を示す概略ブロック図である。
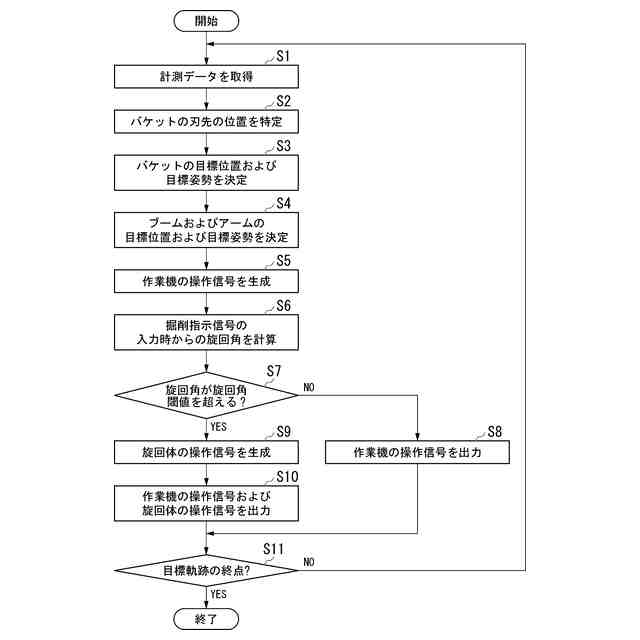
第一実施形態に係る目標軌跡の例を示す図である。
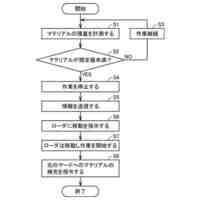
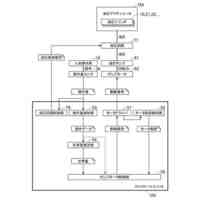
第一実施形態に係る自動掘削制御方法を示すフローチャートである。
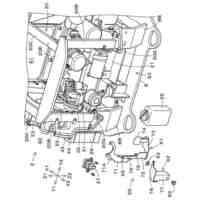
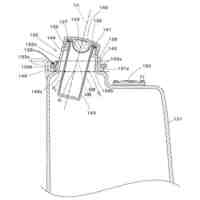
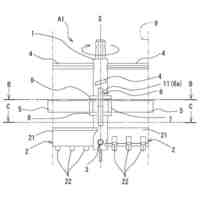
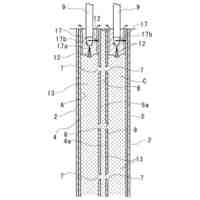
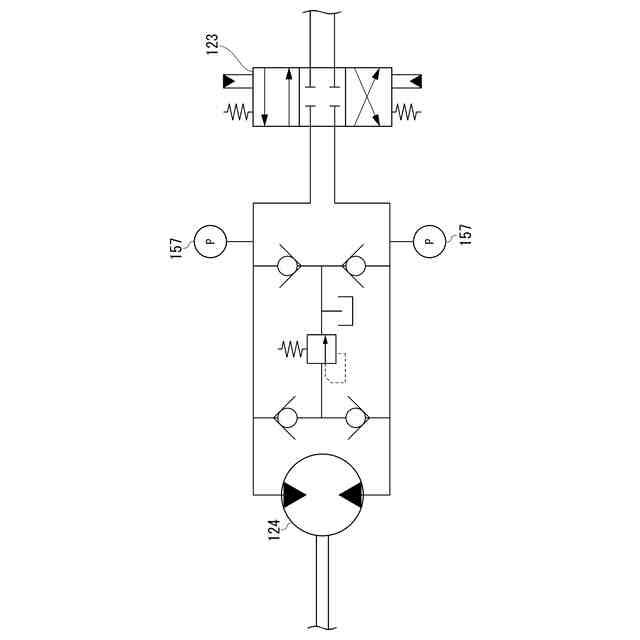
第二実施形態に係る旋回モータの構成を示す図である。
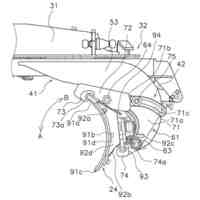
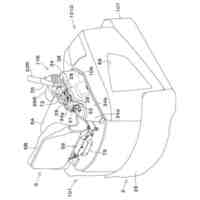
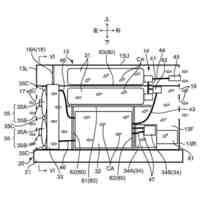
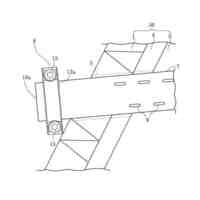
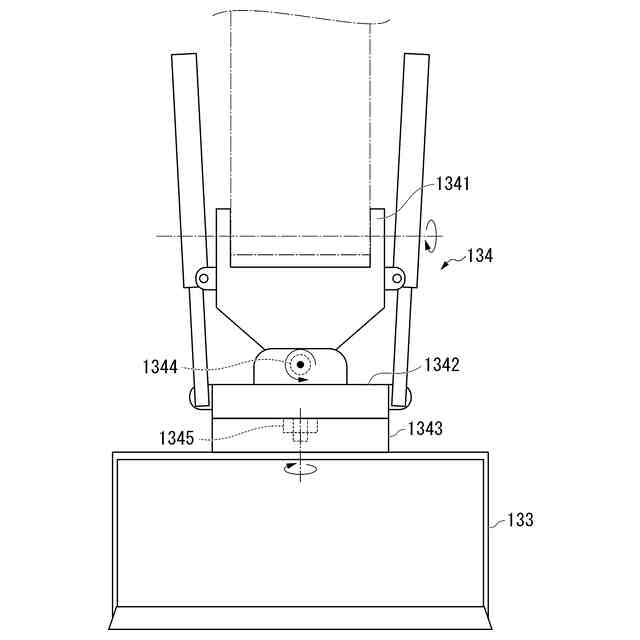
第三実施形態に係るチルトローテートバケットの構成を示す図である。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら実施形態について詳しく説明する。
〈第一実施形態〉
《作業機械100の構成》
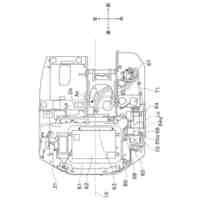
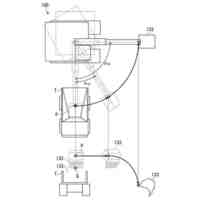
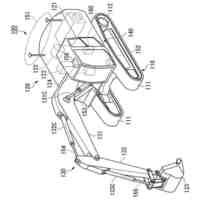
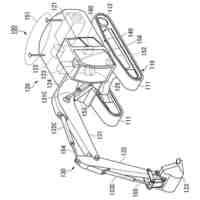
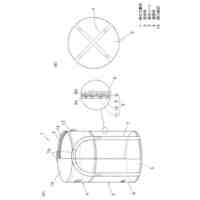
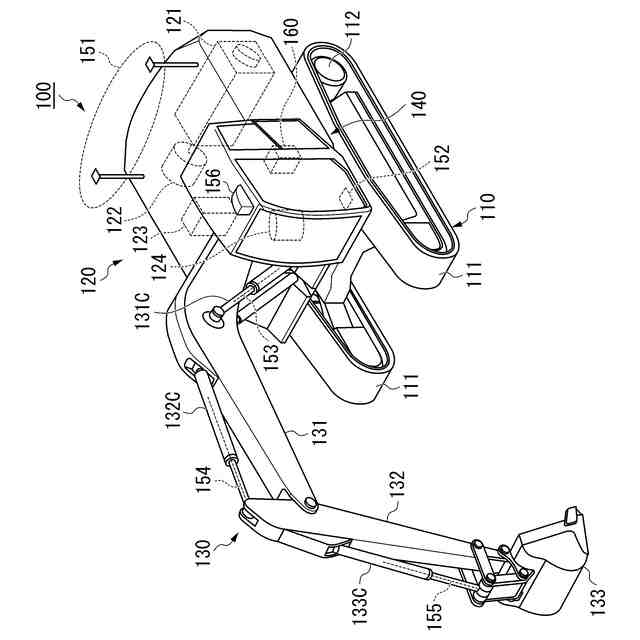
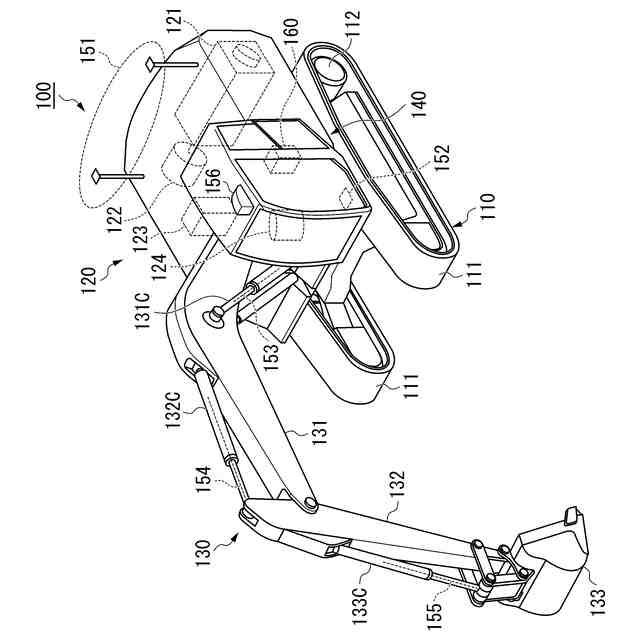
図1は、第一実施形態に係る作業機械100の構成を示す概略図である。第一実施形態に係る作業機械100は、オペレータの指示に従って自動掘削制御を行う。自動掘削制御とは、バケット133の刃先が掘削対象上の掘削開始位置に配置された状態から、ブーム131、アーム132、およびバケット133を駆動させて土砂を掘削する動作を自動的に実行する制御である。つまり、自動掘削制御において作業機械100は走行体110および旋回体120の操作信号を出力せず、作業機130を駆動させる。
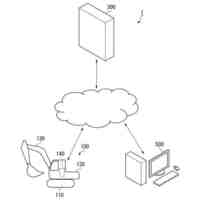
作業機械100は、施工現場にて稼働し、土砂などの施工対象を掘削し、荷としてダンプトラックなどの積込対象のベッセルなど荷台に積み込む。作業機械100の例としては、フェイスショベル、バックホウショベル、ロープショベルなどが挙げられる。また作業機械100は電動駆動するものであってもよいし、油圧駆動するものであってもよい。第一実施形態に係る作業機械100は、バックホウショベルである。作業機械100は、走行体110、旋回体120、作業機130及び運転室140を備える。積込対象の例としては、ダンプトラック、ホッパなどが挙げられる。
【0009】
走行体110は、作業機械100を走行可能に支持する。走行体110は、左右に設けられた2つの無限軌道111と、各無限軌道111を駆動するための2つの走行モータ112を備える。走行体110は、支持部の一例である。
旋回体120は、走行体110に旋回中心回りに旋回可能に支持される。
作業機130は、油圧により駆動する。作業機130は、旋回体120の前部に上下方向に駆動可能に支持される。
運転室140は、オペレータが搭乗し、作業機械100の操作を行うためのスペースである。運転室140は、旋回体120の左前部に設けられる。
ここで、旋回体120のうち作業機130が取り付けられる部分を前部という。また、旋回体120について、前部を基準に、反対側の部分を後部、左側の部分を左部、右側の部分を右部という。
【0010】
《旋回体120の構成》
旋回体120は、エンジン121、油圧ポンプ122、コントロールバルブ123、旋回モータ124を備える。
エンジン121は、油圧ポンプ122を駆動する原動機である。エンジン121は、動力源の一例である。
油圧ポンプ122は、エンジン121により駆動される可変容量ポンプである。油圧ポンプ122は、コントロールバルブ123を介して各アクチュエータ(ブームシリンダ131C、アームシリンダ132C、バケットシリンダ133C、走行モータ112、及び旋回モータ124)に作動油を供給する。
コントロールバルブ123は、油圧ポンプ122から供給される作動油の流量を制御する。
旋回モータ124は、コントロールバルブ123を介して油圧ポンプ122から供給される作動油によって駆動し、旋回体120を旋回させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
電動式作業機械
10日前
株式会社小松製作所
電動式作業機械
10日前
株式会社小松製作所
作業車両、およびブレード支持構造
3日前
株式会社小松製作所
識別システム、識別方法および作業車両
3日前
株式会社小松製作所
識別システム、識別方法および作業車両
3日前
株式会社小松製作所
モデル生成装置、判定装置および判定方法
20日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
9日前
株式会社小松製作所
積込機械の制御装置、積込機械の制御方法および遠隔操作システム
9日前
株式会社小松製作所
作業機械のオイル性状診断システムおよび作業機械のオイル性状診断方法
3日前
株式会社小松製作所
作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システム
2日前
株式会社小松製作所
作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システム
2日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の制御方法、及び作業機械の遠隔操作システム
3日前
株式会社大林組
建築物
23日前
株式会社クボタ
作業機
16日前
日本車輌製造株式会社
杭打機
20日前
株式会社ジェック
水流方向切替装置
25日前
鹿島建設株式会社
漂流物の捕捉構造
16日前
ヤンマーホールディングス株式会社
作業機械
23日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
23日前
株式会社テクアノーツ
通船ゲート装置
20日前
コベルコ建機株式会社
作業機械
20日前
日立建機株式会社
作業機械
18日前
ジーネットワーク株式会社
二重管CFT合成杭
3日前
住友重機械工業株式会社
ショベル
23日前
住友重機械工業株式会社
ショベル
23日前
日本植生株式会社
緑化土嚢袋
16日前
日本車輌製造株式会社
アースドリル
10日前
株式会社地盤リスク研究所
擁壁の補強工法
20日前
有限会社 櫂設計事務所
掘削・撹拌具
16日前
五洋建設株式会社
鋼管矢板の接合方法
2日前
株式会社技研製作所
杭の定着方法
3日前
大和ハウス工業株式会社
建物の建設方法
23日前
コベルコ建機株式会社
作業機械
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ