TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012925
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023116121
出願日
2023-07-14
発明の名称
運転支援装置、運転支援方法、および運転支援用コンピュータプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250117BHJP(信号)
要約
【課題】周辺の状況に応じて変動する注意レベルに応じて車両の運転を支援する。
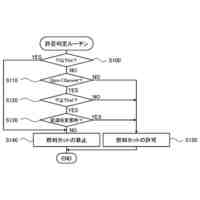
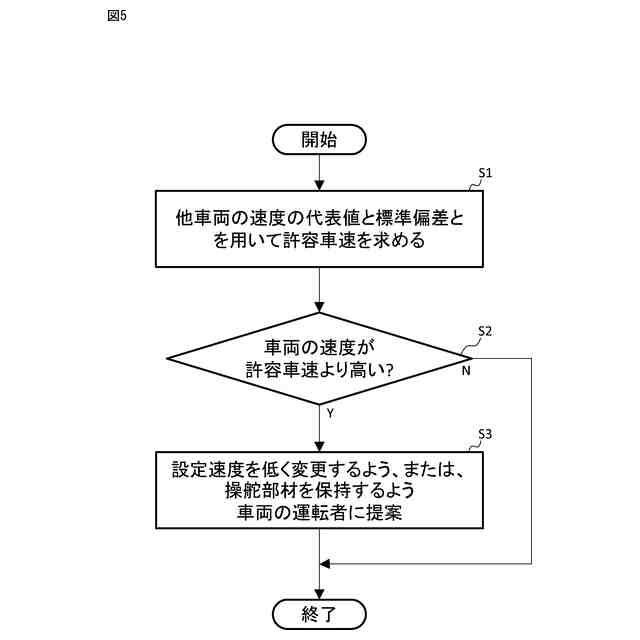
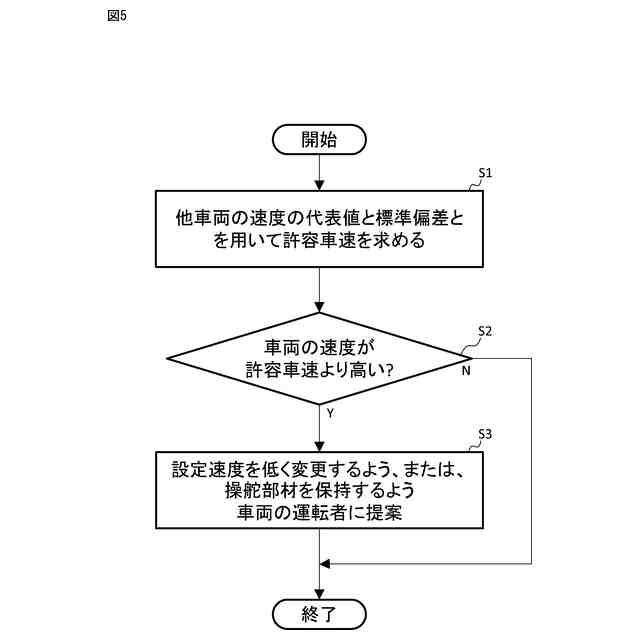
【解決手段】運転支援装置は、車両の速度が、車両の前方の所定地点を所定期間に通行した他車両の速度の代表値と他車両の速度の標準偏差とを用いて求められる許容速度よりも高いか否かを判定し、車両の速度が許容速度よりも高いと判定された場合、車両の走行する速度として設定された設定速度を低く変更するよう、または、車両を操舵する操舵操作を受け付ける操舵部材を保持するよう、車両の運転者に提案する。
【選択図】図5
特許請求の範囲
【請求項1】
車両の速度が、前記車両の前方の所定地点を所定期間に通行した他車両の速度の代表値と標準偏差とを用いて求められる許容速度よりも高いか否かを判定する速度判定部と、
前記車両の速度が前記許容速度よりも高いと判定された場合、前記車両の走行する速度として設定された設定速度を低く変更するよう、または、前記車両を操舵する操舵操作を受け付ける操舵部材を保持するよう、前記車両の運転者に提案する提案部と、
を備える運転支援装置。
続きを表示(約 940 文字)
【請求項2】
所定の領域ごとに視界不良をもたらす気象条件の有無を表す気象情報に基づいて、前記所定地点を含む領域の視界不良の有無を判定する視界判定部をさらに備え、
前記速度判定部は、前記所定地点を含む領域に視界不良がないと判定された場合、前記他車両の速度の平均に前記他車両の速度の標準偏差と第1の分布係数との積を加えて前記許容速度を求め、前記所定地点を含む領域に視界不良があると判定された場合、前記他車両の速度の平均に前記他車両の速度の標準偏差と前記第1の分布係数よりも小さい第2の分布係数との積を加えて前記許容速度を求める、請求項1に記載の運転支援装置。
【請求項3】
前記提案部は、前記所定地点を含む領域に視界不良がないと判定された場合、前記設定速度を第1の速度に変更するよう前記運転者に提案し、前記所定地点を含む領域に視界不良があると判定された場合、前記設定速度を前記第1の速度よりも低い第2の速度に変更するよう前記運転者に提案する、請求項2に記載の運転支援装置。
【請求項4】
運転支援装置が、
車両の速度が、前記車両の前方の所定地点を所定期間に通行した他車両の速度の代表値と標準偏差とを用いて求められる許容速度よりも高いか否かを判定し、
前記車両の速度が前記許容速度よりも高いと判定された場合、前記車両の走行する速度として設定された設定速度を低く変更するよう、または、前記車両を操舵する操舵操作を受け付ける操舵部材を保持するよう、前記車両の運転者に提案する、
ことを含む運転支援方法。
【請求項5】
車両の速度が、前記車両の前方の所定地点を所定期間に通行した他車両の速度の代表値と標準偏差とを用いて求められる許容速度よりも高いか否かを判定することと、
前記車両の速度が前記許容速度よりも高いと判定された場合、前記車両の走行する速度として設定された設定速度を低く変更するよう、または、前記車両を操舵する操舵操作を受け付ける操舵部材を保持するよう、前記車両の運転者に提案することと、
を前記車両に搭載されたコンピュータに実行させる運転支援用コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、運転者による車両の運転を支援する運転支援装置、運転支援方法、および運転支援用コンピュータプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
車両の周辺状況を表す周辺データに基づいて、車両の走行のための運転者の操作のうち少なくとも一つを自動的に制御する走行制御装置は、車両が置かれた状況に応じて、制御する操作の少なくとも一部について、運転者による制御への変更を要求することがある。
【0003】
特許文献1に記載のモード切替支援装置は、車両の周辺状況を表す周辺データを取得し、周辺データに基づいて、車両の運転モードを手動運転モードと自動運転モードとの間で切り替えるモード切替の推奨される位置であるモード切替推奨位置を計算する。
【先行技術文献】
【特許文献】
【0004】
特開2018-146552号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
視界が良好でない、道路上に障害物が存在するといった理由により他車両が低速で走行している領域を高速で走行する車両は、他車両よりも事故などの不測の事態が発生する可能性が大きい。そのため、このような状況では、高い注意レベルをもって車両を走行させることが好ましい。このような、周辺の状況に応じて変動する注意レベルに応じた運転支援が求められている。
【0006】
本開示は、周辺の状況に応じて変動する注意レベルに応じて車両の運転を支援することができる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の要旨は以下のとおりである。
【0008】
(1)車両の速度が、前記車両の前方の所定地点を所定期間に通行した他車両の速度の代表値と標準偏差とを用いて求められる許容速度よりも高いか否かを判定する速度判定部と、
前記車両の速度が前記許容速度よりも高いと判定された場合、前記車両の走行する速度として設定された設定速度を低く変更するよう、または、前記車両を操舵する操舵操作を受け付ける操舵部材を保持するよう、前記車両の運転者に提案する提案部と、
を備える運転支援装置。
【0009】
(2)所定の領域ごとに視界不良をもたらす気象条件の有無を表す気象情報に基づいて、前記所定地点を含む領域の視界不良の有無を判定する視界判定部をさらに備え、
前記速度判定部は、前記所定地点を含む領域に視界不良がないと判定された場合、前記他車両の速度の平均に前記他車両の速度の標準偏差と第1の分布係数との積を加えて前記許容速度を求め、前記所定地点を含む領域に視界不良があると判定された場合、前記他車両の速度の平均に前記他車両の速度の標準偏差と前記第1の分布係数よりも小さい第2の分布係数との積を加えて前記許容速度を求める、上記(1)に記載の運転支援装置。
【0010】
(3)前記提案部は、前記所定地点を含む領域に視界不良がないと判定された場合、前記設定速度を第1の速度に変更するよう前記運転者に提案し、前記所定地点を含む領域に視界不良があると判定された場合、前記設定速度を前記第1の速度よりも低い第2の速度に変更するよう前記運転者に提案する、上記(2)に記載の運転支援装置。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電動機
1日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
生成装置
2日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
固体電池
5日前
トヨタ自動車株式会社
固体電池
5日前
トヨタ自動車株式会社
電源装置
1日前
トヨタ自動車株式会社
積層コア
1日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
クランプ
1日前
トヨタ自動車株式会社
給電装置
2日前
トヨタ自動車株式会社
検査方法
5日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
破袋装置
2日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
電源装置
1日前
トヨタ自動車株式会社
燃焼装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ