TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012895
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023116069
出願日
2023-07-14
発明の名称
埋設物表示装置、埋設物検出装置及びプログラム
出願人
日本信号株式会社
代理人
弁理士法人朝日特許事務所
主分類
G01V
3/12 20060101AFI20250117BHJP(測定;試験)
要約
【課題】地中レーダ探査においてAI検出機能とMG検出機能とを併用して探査精度を向上させる。
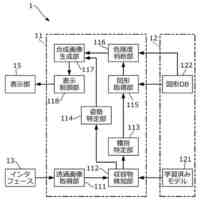
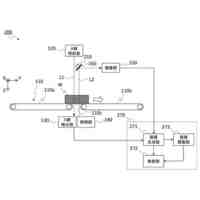
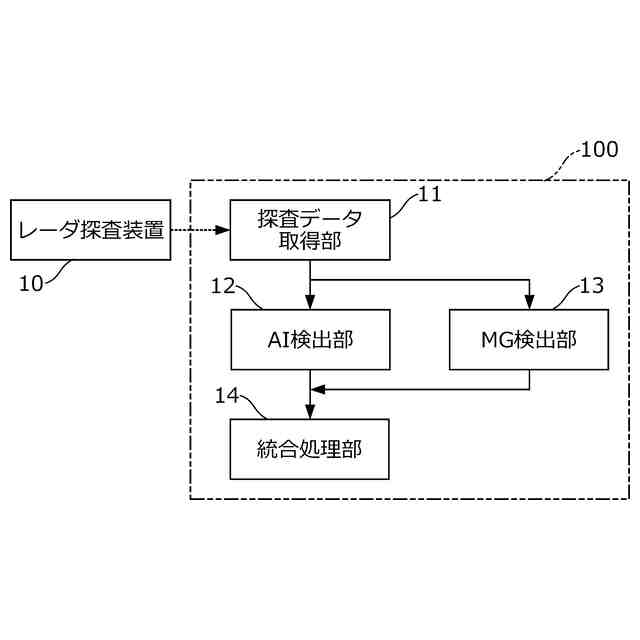
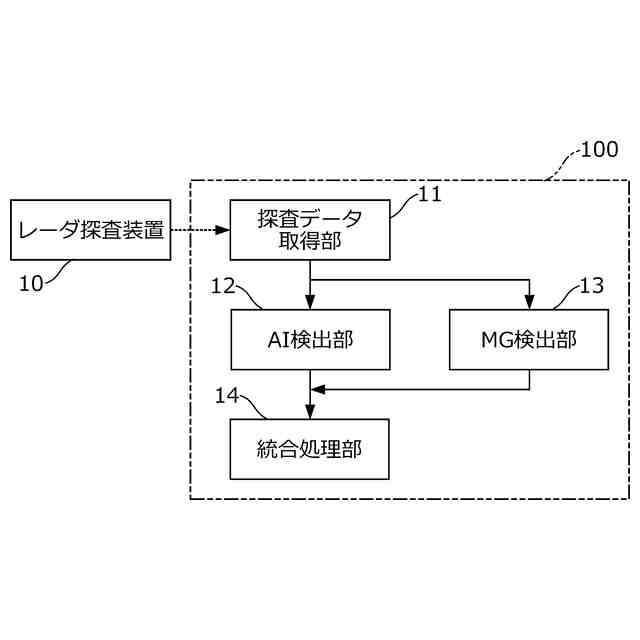
【解決手段】AI検出部12は、AI検出機能、つまりレーダ探査装置10から取得された探査データを用いて、その探査データにおいて埋設物の形状に関する機械学習を用いて埋設物が存在する地中範囲を検出する処理を行う。MG検出部13と、MG検出機能、つまりレーダ探査装置10から取得された探査データを用いて、埋設物からの反射信号のマイグレーション処理を行って埋設物の位置を検出する処理を行う。統合処理部14は、AI検出部12による検出結果と、MG検出部13による検出結果とを1つの画面上に重ね合わせることで、それぞれの検出結果である埋設物の位置を表示する。
【選択図】図9
特許請求の範囲
【請求項1】
地中のレーダ探査によって得られた探査データにおいて埋設物の形状に関する機械学習を用いて当該埋設物が存在する地中範囲を検出した結果と、前記レーダ探査による埋設物反射信号のマイグレーション処理を行った結果とを重ね合わせて、埋設物の位置を表示する埋設物表示装置。
続きを表示(約 690 文字)
【請求項2】
地中のレーダ探査によって得られた探査データにおいて埋設物の形状に関する機械学習を用いて当該埋設物が存在する地中範囲を検出し、検出した前記地中範囲における埋設物反射信号のマイグレーション処理により前記埋設物の位置である点座標を検出する埋設物検出装置。
【請求項3】
前記機械学習を用いて検出された前記地中範囲に対してのみ前記埋設物反射信号のマイグレーション処理を行って、前記埋設物の位置である点座標を検出する請求項2記載の埋設物検出装置。
【請求項4】
検出された前記地中範囲において前記マイグレーション処理により複数の点座標が検出された場合に、絶対値が最も大きい埋設物反射信号に対応する点座標を前記埋設物の位置として検出する請求項2記載の埋設物検出装置。
【請求項5】
前記探査データにおいて前記埋設物の特徴点の近傍の範囲に含まれ、且つ、絶対値が最も大きい埋設物反射信号に対応する点座標を前記埋設物の位置として検出する請求項4記載の埋設物検出装置。
【請求項6】
前記点座標は、レーダ探査装置の移動方向における座標と、地中の深さ方向の座標とからなる請求項2記載の埋設物検出装置。
【請求項7】
コンピュータに、
地中のレーダ探査によって得られた探査データにおいて埋設物の形状に関する機械学習を用いて当該埋設物が存在する地中範囲を検出し、検出した前記地中範囲における埋設物反射信号のマイグレーション処理により前記埋設物の位置である点座標を検出させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は地中の埋設物を検出するための技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
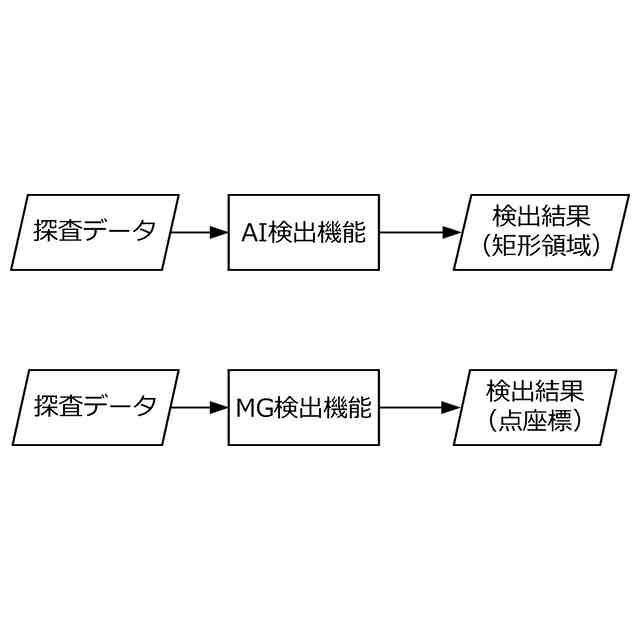
地中の埋設物を検出する技術として、例えば特許文献1に記載されているように地中のレーダ探査により得られた探査データに対してマイグレーション処理を行い、埋設物からの反射信号の強度に基づいて埋設物の位置を検出する機能(以下、MG検出機能という)のほか、上記探査データにおいて埋設物の形状に関する機械学習アルゴリズムを用いてその埋設物が存在する地中範囲を検出する機能(以下、AI検出機能という)がそれぞれ知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-124290号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
MG検出機能によれば、埋設物の位置を点座標として特定することができる一方、解析に時間がかかったり誤検出が発生したりする等の問題がある。また、AI検出機能によれば、作業者がその検出結果を参照することにより、埋設物と判断すべきではない対象への取捨選択が容易となるという利点があるが、埋設物が存在する地中範囲を矩形領域で表現するため、MG検出による点座標の検出と比較すると正確性に欠ける。
【0005】
本発明は、このような問題に着目してなされたものであり、地中レーダ探査においてAI検出機能とMG検出機能とを併用して探査精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明は、地中のレーダ探査によって得られた探査データにおいて埋設物の形状に関する機械学習を用いて当該埋設物が存在する地中範囲を検出した結果と、前記レーダ探査による埋設物反射信号のマイグレーション処理を行った結果とを重ね合わせて、埋設物の位置を表示する埋設物表示装置を提供する。この構成によれば、機械学習を用いた検出の結果とマイグレーション処理の結果とを重ねて表示し、それを閲覧する作業者による埋設物の位置の特定を支援することが可能となる。
【0007】
また、本発明は、地中のレーダ探査によって得られた探査データにおいて埋設物の形状に関する機械学習を用いて当該埋設物が存在する地中範囲を検出し、検出した前記地中範囲における埋設物反射信号のマイグレーション処理により前記埋設物の位置である点座標を検出する埋設物検出装置を提供する。この構成によれば、機械学習を用いた検出とマイグレーション処理による検出とを併用して埋設物の位置を特定することで、埋設物の探査精度を向上させることが可能となる。
【0008】
前記埋設物検出装置において、前記機械学習を用いて検出された前記地中範囲に対してのみ前記埋設物反射信号のマイグレーション処理を行って、前記埋設物の位置である点座標を検出するようにしてもよい。この構成によれば、機械学習を用いた検出で検出された地中範囲に対してのみマイグレーション処理による検出を行うことで、全探査範囲にマイグレーション処理による検出を行う場合と比較して、処理に要する時間を短くすることができる。
【0009】
前記埋設物検出装置において、検出された前記地中範囲において前記マイグレーション処理により複数の点座標が検出された場合に、絶対値が最も大きい埋設物反射信号に対応する点座標を前記埋設物の位置として検出するようにしてもよい。この構成によれば、機械学習を用いた検出で検出された地中範囲においてマイグレーション処理による検出で複数の点座標が検出された場合であっても、いずれかの点座標を埋設物の位置として検出することが可能となる。
【0010】
前記埋設物検出装置において、前記探査データにおいて前記埋設物の特徴点の近傍の範囲に含まれ、且つ、絶対値が最も大きい埋設物反射信号に対応する点座標を前記埋設物の位置として検出するようにしてもよい。この構成によれば、機械学習を用いた検出で検出された地中範囲においてマイグレーション処理による検出で複数の点座標が検出された場合であっても、最も確からしい点座標を埋設物の位置として検出することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本信号株式会社
表示装置
17日前
日本信号株式会社
物体検知装置
19日前
日本信号株式会社
列車の車上装置
12日前
日本信号株式会社
ダイヤ不整合の検出装置及び検出プログラム
17日前
日本信号株式会社
ナビゲーションシステム及びナビゲーションプログラム
4日前
個人
粒子分析装置
2日前
個人
アクセサリー型テスター
3日前
エイブリック株式会社
電流検出回路
16日前
栄進化学株式会社
浸透探傷用濃縮液
9日前
株式会社テイエルブイ
振動検出装置
2日前
株式会社ミツトヨ
画像測定機
4日前
東レ株式会社
シート状物の検査方法
17日前
株式会社チノー
放射光測温装置
16日前
ダイハツ工業株式会社
試料セル
2日前
大和製衡株式会社
計量装置
9日前
トヨタ自動車株式会社
電気自動車
3日前
日本特殊陶業株式会社
ガスセンサ
16日前
株式会社 キョーワ
食品搬送装置
16日前
日本特殊陶業株式会社
ガスセンサ
16日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
株式会社熊谷組
計測システム
9日前
理研計器株式会社
ガス検出器
4日前
日本碍子株式会社
ガスセンサ
16日前
理研計器株式会社
ガス検出器
4日前
大成建設株式会社
画像表示システム
12日前
富士電機株式会社
エンコーダ
17日前
理研計器株式会社
ガス検出器
4日前
株式会社ニコン
検出装置
2日前
株式会社 システムスクエア
検査装置
10日前
東洋計器株式会社
超音波式流量計
9日前
株式会社デンソー
試験装置
12日前
東洋計器株式会社
超音波式流量計
9日前
TDK株式会社
温度センサ
17日前
東洋計器株式会社
超音波式流量計
9日前
トヨタ自動車株式会社
情報処理装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ