TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012266
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114986
出願日
2023-07-13
発明の名称
蓋閉め適性判定プログラム、蓋閉め適性判定装置、蓋閉め適性判定方法および蓋閉め方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B65B
7/28 20060101AFI20250117BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
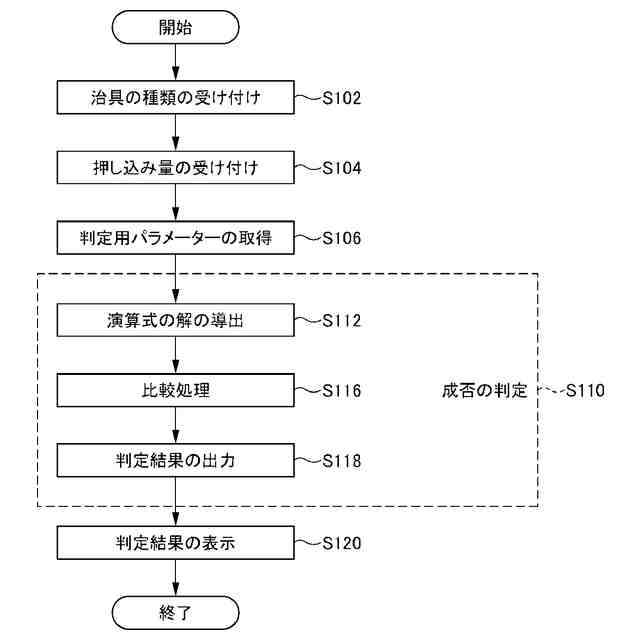
【課題】蓋閉め治具による蓋閉め作業の適性を的確に判定できる蓋閉め適性判定プログラム、蓋閉め治具による蓋閉め作業の適性を的確に判定できる蓋閉め適性判定装置および蓋閉め適性判定方法、ならびに、蓋閉め作業の成功率が高い蓋閉め方法を提供すること。
【解決手段】容器本体に蓋体を嵌合させて嵌合体を得る蓋閉め作業を、蓋閉め治具を備える自動機に行わせるとき、蓋閉め作業の成否をコンピューターに判定させる蓋閉め適性判定プログラムであって、コンピューターに、判定用パラメーターとして、蓋体、容器本体および嵌合体の各機械的特性、ならびに、事前試験で実測された蓋閉め治具の変位の実測値uと蓋閉め治具が受ける荷重の実測値Fとの関係、を取得するパラメーター取得処理と、判定用パラメーターに基づいて、蓋閉め作業の成否を判定する成否判定処理と、を行わせる蓋閉め適性判定プログラム。
【選択図】図6
特許請求の範囲
【請求項1】
蓋体から容器本体に向かう押圧方向に前記蓋体を押圧し、前記容器本体に前記蓋体を嵌合させて嵌合体を得る蓋閉め作業を、蓋閉め治具を備える自動機に行わせるとき、前記蓋閉め作業の成否をコンピューターに判定させる蓋閉め適性判定プログラムであって、
コンピューターに、
判定用パラメーターとして、前記蓋体、前記容器本体および前記嵌合体の各機械的特性、ならびに、前記蓋閉め作業の事前試験で実測された前記蓋閉め治具の変位の実測値uと前記蓋閉め治具が受ける荷重の実測値Fとの関係、を取得するパラメーター取得処理と、
前記判定用パラメーターに基づいて、前記蓋閉め作業の成否を判定する成否判定処理と、
を行わせることを特徴とする蓋閉め適性判定プログラム。
続きを表示(約 1,400 文字)
【請求項2】
前記パラメーター取得処理は、前記蓋閉め作業が完了したときの前記実測値u、前記実測値F、および、前記蓋閉め作業で印加されたエネルギーの実測値Eを取得させる処理を含む請求項1に記載の蓋閉め適性判定プログラム。
【請求項3】
前記成否判定処理は、前記蓋体、前記容器本体および前記嵌合体をそれぞれ弾性体とみなす計算モデル、ならびに、嵌合前の前記計算モデルに与えたエネルギーと嵌合後の前記計算モデルで蓄積および消費されたエネルギーとが等しくなる力学的エネルギー保存則、に基づいて導出された演算式に対し、前記判定用パラメーターを入力し、前記演算式の解を算出するとともに、前記演算式の解と前記判定用パラメーターとの比較処理の結果に基づいて、前記蓋閉め作業の成否を判定する処理を含む請求項2に記載の蓋閉め適性判定プログラム。
【請求項4】
前記コンピューターに、
前記パラメーター取得処理よりも前に、前記事前試験において前記蓋閉め治具が前記蓋体を所定位置よりも押し込むときの押し込み量を受け付ける押し込み量受付処理を行わせる請求項1ないし3のいずれか1項に記載の蓋閉め適性判定プログラム。
【請求項5】
前記コンピューターに、
前記事前試験で用いる前記蓋閉め治具の種類を受け付ける治具種類受付処理を行わせる請求項1ないし3のいずれか1項に記載の蓋閉め適性判定プログラム。
【請求項6】
前記コンピューターに、
前記成否判定処理の判定結果を表示部に表示する表示処理を行わせる請求項1ないし3のいずれか1項に記載の蓋閉め適性判定プログラム。
【請求項7】
前記表示処理は、前記判定結果が成功である場合に、成功条件に対する被判定値の余裕度を表示させる処理を含む請求項6に記載の蓋閉め適性判定プログラム。
【請求項8】
前記コンピューターに、
前記成否判定処理の判定結果が成功である場合に、前記自動機を作動させる制御信号を出力する制御信号出力処理を行わせる請求項1ないし3のいずれか1項に記載の蓋閉め適性判定プログラム。
【請求項9】
前記自動機は、前記蓋閉め治具の位置を検出するエンコーダー、および、前記蓋閉め治具に加わる力を検出する力覚センサー、を備え、
前記パラメーター取得処理は、前記エンコーダーの検出結果および前記力覚センサーの検出結果を、前記実測値uと前記実測値Fとの関係として取得させる処理を含む請求項1ないし3のいずれか1項に記載の蓋閉め適性判定プログラム。
【請求項10】
蓋体から容器本体に向かう押圧方向に前記蓋体を押圧し、前記容器本体に前記蓋体を嵌合させて嵌合体を得る蓋閉め作業を、蓋閉め治具を備える自動機に行わせるとき、前記蓋閉め作業の成否を判定する蓋閉め適性判定装置であって、
請求項1ないし3のいずれか1項に記載の蓋閉め適性判定プログラムを実行する前記コンピューターを含み、前記成否判定処理の判定結果を出力する判定制御部と、
前記判定用パラメーターの入力を受け付け、入力結果を前記判定制御部に伝送する入力部と、
前記判定制御部から出力された前記判定結果を表示する表示部と、
を備えることを特徴とする蓋閉め適性判定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、蓋閉め適性判定プログラム、蓋閉め適性判定装置、蓋閉め適性判定方法および蓋閉め方法に関するものである。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
近年、各種の生産現場においてロボットの導入が検討されているが、その一例として、弁当箱のような箱状の容器に対し、蓋閉めを行う蓋閉め装置が用いられている。食品等を収容する容器では、容器本体の開口部に対して蓋体を被せ、嵌合させる態様が一般的である。
【0003】
例えば、特許文献1には、容器本体に蓋を内嵌合させることにより、容器本体の開口を閉塞する蓋閉装置が開示されている。この蓋閉装置は、容器本体を下方から支持する支持部材と、蓋を搬送する蓋搬送部と、容器本体を囲む枠体と、枠体の内壁面から出没する複数の爪と、を備える。そして、蓋搬送部によって容器本体の開口に対面する位置に蓋を搬送した後、複数の爪で蓋面の外周にある溝部を押圧することにより、蓋を容器本体に圧入する。これにより、蓋が容器本体に嵌合し、蓋閉めがなされる。
【先行技術文献】
【特許文献】
【0004】
特開2020-100424号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の蓋閉装置では、蓋の形や大きさが変更になった場合、それに応じて蓋搬送部や枠体も変更する必要がある。ところが、嵌合には、蓋や容器本体の変形を伴うことから、蓋を押圧する位置のずれ等があった場合、嵌合できずに蓋閉めが失敗することがある。このため、蓋や容器本体と、蓋を押圧する治具(蓋閉め治具)と、の適性について的確に判定し、蓋閉め作業の成功率を高めることが課題となっている。
【課題を解決するための手段】
【0006】
本発明の適用例に係る蓋閉め適性判定プログラムは、
蓋体から容器本体に向かう押圧方向に前記蓋体を押圧し、前記容器本体に前記蓋体を嵌合させて嵌合体を得る蓋閉め作業を、蓋閉め治具を備える自動機に行わせるとき、前記蓋閉め作業の成否をコンピューターに判定させる蓋閉め適性判定プログラムであって、
コンピューターに、
判定用パラメーターとして、前記蓋体、前記容器本体および前記嵌合体の各機械的特性、ならびに、前記蓋閉め作業の事前試験で実測された前記蓋閉め治具の変位の実測値uと前記蓋閉め治具が受ける荷重の実測値Fとの関係、を取得するパラメーター取得処理と、
前記判定用パラメーターに基づいて、前記蓋閉め作業の成否を判定する成否判定処理と、
を行わせる。
【0007】
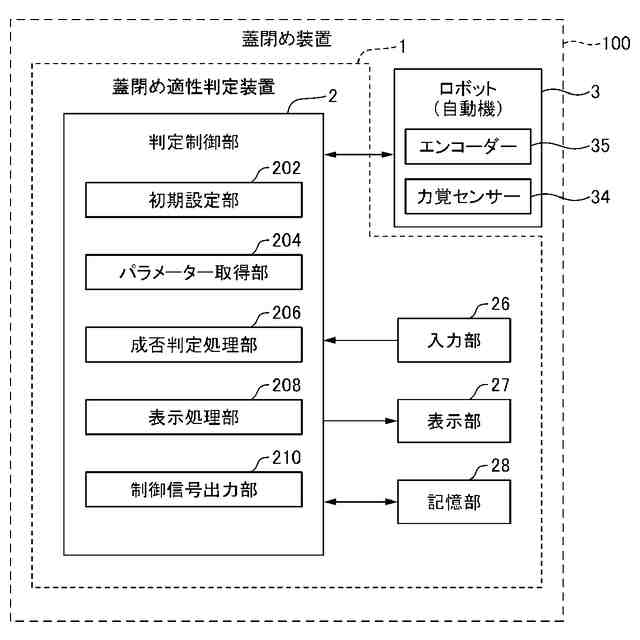
本発明の適用例に係る蓋閉め適性判定装置は、
蓋体から容器本体に向かう押圧方向に前記蓋体を押圧し、前記容器本体に前記蓋体を嵌合させて嵌合体を得る蓋閉め作業を、蓋閉め治具を備える自動機に行わせるとき、前記蓋閉め作業の成否を判定する蓋閉め適性判定装置であって、
本発明の適用例に係る蓋閉め適性判定プログラムを実行する前記コンピューターを含み、前記成否判定処理の判定結果を出力する判定制御部と、
前記判定用パラメーターの入力を受け付け、入力結果を前記判定制御部に伝送する入力部と、
前記判定制御部から出力された前記判定結果を表示する表示部と、
を備える。
【0008】
本発明の適用例に係る蓋閉め適性判定方法は、
蓋体から容器本体に向かう押圧方向に前記蓋体を押圧し、前記容器本体に前記蓋体を嵌合させて嵌合体を得る蓋閉め作業を、蓋閉め治具を備える自動機に行わせるとき、前記蓋閉め作業の成否を判定する蓋閉め適性判定方法であって、
判定用パラメーターとして、前記蓋体、前記容器本体および前記嵌合体の各機械的特性、ならびに、前記蓋閉め作業の事前試験で実測された前記蓋閉め治具の変位の実測値uと前記蓋閉め治具が受ける荷重の実測値Fとの関係、を取得するパラメーター取得ステップと、
前記判定用パラメーターに基づいて、前記蓋閉め作業の成否を判定する成否判定ステップと、
を有する。
【0009】
本発明の適用例に係る蓋閉め方法は、
蓋体から容器本体に向かう押圧方向に前記蓋体を押圧し、前記容器本体に前記蓋体を嵌合させて嵌合体を得る蓋閉め作業を、蓋閉め治具を備える自動機を用いて行う蓋閉め方法であって、
本発明の適用例に係る蓋閉め適性判定プログラムを前記コンピューターに実行させる蓋閉め適性判定ステップと、
前記成否判定処理の判定結果が成功である場合に、前記自動機を用いて前記蓋閉め作業を行う蓋閉め作業ステップと、
を有する。
【図面の簡単な説明】
【0010】
実施形態に係る蓋閉め適性判定装置を備える蓋閉め装置を示す機能ブロック図である。
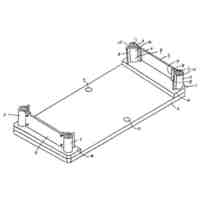
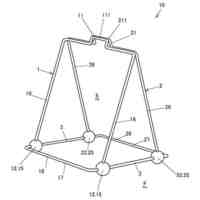
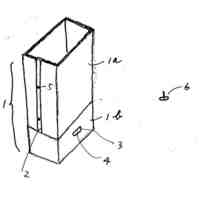
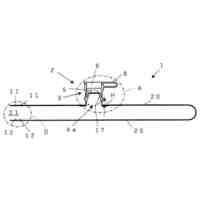
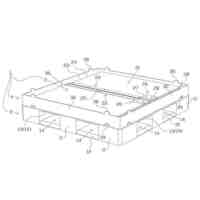
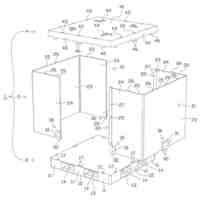
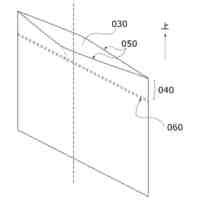
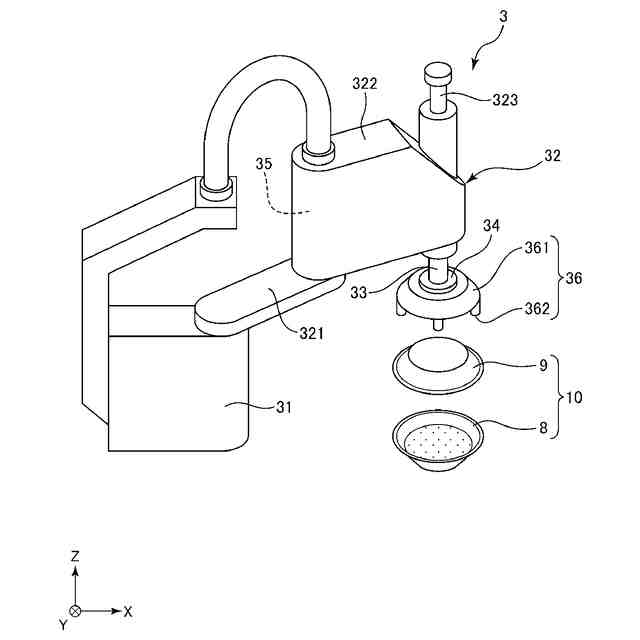
図1に示す蓋閉め装置が適用される容器本体および蓋体の一例、ならびに、図1に示すロボットの概略図である。
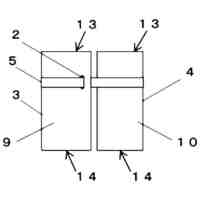
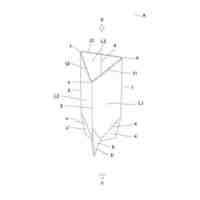
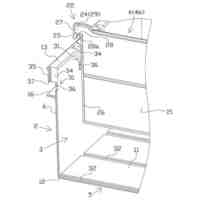
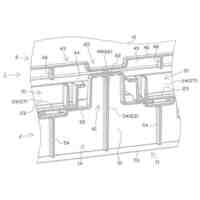
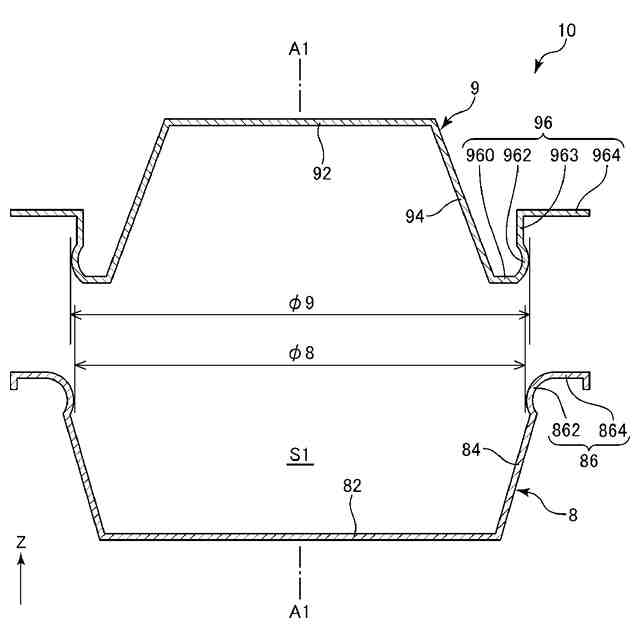
図2に示す蓋体、容器本体および嵌合体を示す断面図である。
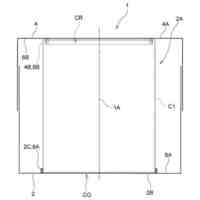
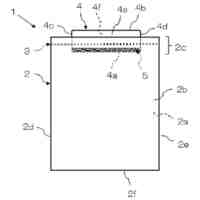
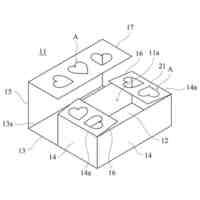
押圧部の数が8個である蓋閉め治具、および、押圧部の数が4個である蓋閉め治具について、それぞれ、押圧部と蓋体との位置関係の例をZ軸上から見たときの平面図である。
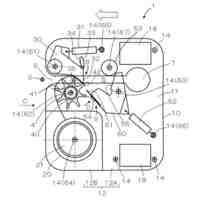
図1の蓋閉め適性判定装置が備える各機能部の機能を実現するハードウェア構成例を示す図である。
実施形態に係る蓋閉め適性判定方法の構成を示すフローチャートである。
表示部に表示される初期設定値入力画面の一例を示す図である。
表示部に表示される判定用パラメーター入力画面の一例を示す図である。
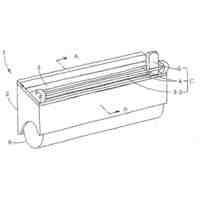
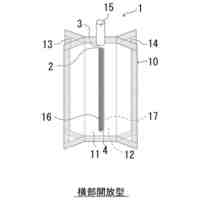
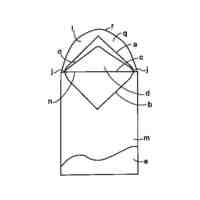
容器本体の単体の機械的特性を測定する方法の一例を示す断面図である。
蓋体の単体の機械的特性を測定する方法の一例を示す断面図である。
嵌合体の機械的特性を測定する方法の一例を示す断面図である。
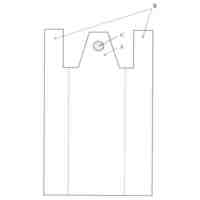
蓋閉め作業を説明するための断面図である。
蓋閉め作業を説明するための断面図である。
蓋閉め作業を説明するための断面図である。
事前試験で取得した、蓋閉め治具の変位の実測値uに対する蓋閉め治具が受ける荷重の実測値Fの変化を表すグラフである。
容器本体と蓋体とが重なった状態を、直列に接続された2つのバネ要素で模した計算モデルを示す概念図である。
表示部に表示される適性判定実行画面および判定結果表示画面の一例を示す図である。
実施形態に係る蓋閉め方法の構成を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
3か月前
個人
包装体
4か月前
個人
構造体
11か月前
個人
ゴミ箱
3か月前
個人
収納用具
7か月前
個人
物品収納具
7か月前
個人
容器
18日前
個人
折り畳み水槽
4か月前
個人
パウチ補助具
3か月前
個人
掃除楽々ゴミ箱
8か月前
個人
開封用カッター
9か月前
個人
ダンボール宝箱
4か月前
個人
閉塞装置
1か月前
個人
チャック付き袋体
10か月前
株式会社和気
包装用箱
5日前
個人
折りたたみコップ
10か月前
個人
圧縮収納袋
4か月前
個人
パウチ容器
10か月前
個人
ゴミ処理機
12日前
個人
伸縮するゴミ収納器
11か月前
個人
粘着テープ剥がし具
9か月前
株式会社新弘
容器
3か月前
株式会社新弘
容器
3か月前
三甲株式会社
容器
7か月前
個人
粘着テープ切断装置
6か月前
三甲株式会社
容器
6か月前
三甲株式会社
蓋体
20日前
個人
プラスチックバッグ
12か月前
個人
チャック付き保存袋
9か月前
株式会社イシダ
箱詰装置
6か月前
株式会社イシダ
包装装置
3か月前
積水樹脂株式会社
接着剤
3か月前
個人
塗料容器用蓋
4か月前
個人
開口しやすいレジ袋
11か月前
個人
包装箱
1か月前
個人
粘着テープ剥がし具
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ